Sure I will chase that up for you today, worst case you can always return it back to us for testing/repairs and if we can’t fix we will replace it assuming but is still under warranty (within 180 days of purchase)
Thanks alot, Bought it on 2nd October.
Hello everyone,
Just to make sure, do I need to connect power, escs and everything before connecting to pc?
The following forum has a topic on this issue and says that fc wont work unless it gets powerd from lipo.
You think this might be an issue?
Also it says in Betaflight 3.4.0 it is working fine without battery.
I dont want to plug the lipo and usb at the same time as I might fry the board… so need a little advice on this. unmannedtech asked to return but one more try before that. I might run into same problem with another f722 ![]()
give it ago…
Powering the FC by USB and Lipo at the same time shouldn’t hurt it at all.
Powering by Lipo is the only way to activate the ESCs so they can be calibrated.
OMG I just had a intense moment with this Matek fc 

I was thinking of trying both lipo and usb but before that I had a random thought of trying another usb cable laying around (it’s a fast charging cable) and it made the usb connection sound in windows.
I tried 2 cables but may be they are not speed enough? idk
It works fine now. Thanks for the help everyone. Then I pluged the default cable and it don’t work. idk why it didn’t work with the other usb cable I tried.
I just flashed the recent firmware and feels gooooood 
there are two types of usb cables…
power and data
you may have been using a power cable they look the same.
well done in finding your problem and moving forwards
1 Like
Does anyone know what does led and buzzer port mean in matek f722? is it a power port or a signal port that can be controlled using radio? Like a servo?
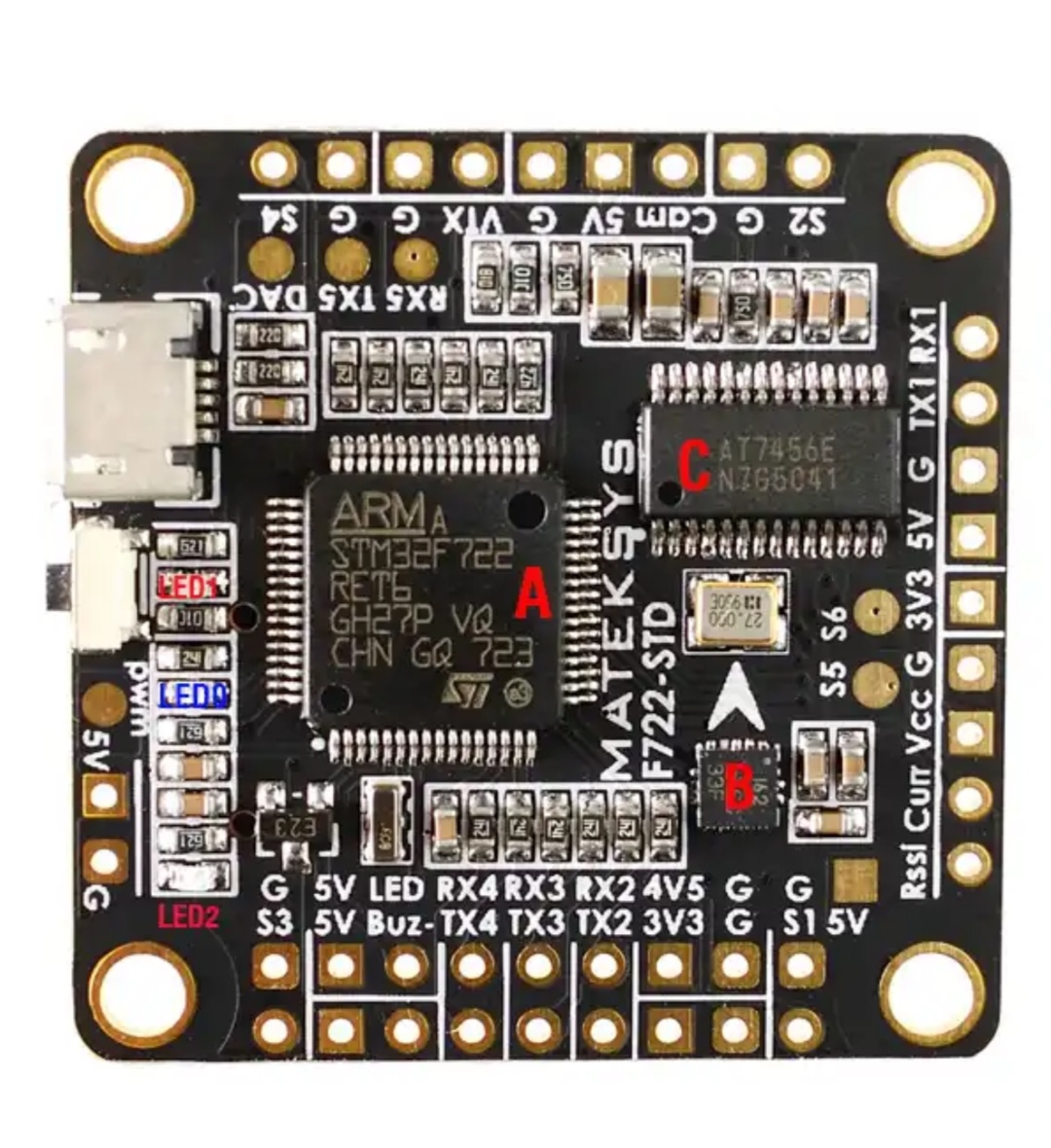
talking about the bottom left six holes now, the G 5v and LED on top are for programmable RGB led lights, eg blue disarm red arm, needs to be turned on in config then programmed through led tab.
painless 360 as a good instruction video here https://youtu.be/XdiJQwMIjJw.
Bottom row S3 is for motor 3 signal 5v and buz are to attach a pietzo buzzer that sounds when aircraft lost, low battery etc can be switch on off from radio by switch but must config in modes tab.
1 Like
Show DFU when writing?
It says there is 8 motor support but i only see 7 which including the pwm pad. Anyone know where is the motor 8? How do I actually find out what ports are those codes for example, A02, B02, A00, A01…
Help please
Resourse list is:
resource BEEPER 1 C13
resource MOTOR 1 C06
resource MOTOR 2 C07
resource MOTOR 3 C08
resource MOTOR 4 C09
resource MOTOR 5 B01
resource MOTOR 6 A08
resource MOTOR 7 B08
resource MOTOR 8 A02
resource PPM 1 A03
resource PWM 1 A00
resource PWM 2 A01
resource LED_STRIP 1 A15
resource SERIAL_TX 1 A09
resource SERIAL_TX 2 A02
resource SERIAL_TX 3 C10
resource SERIAL_TX 4 A00
resource SERIAL_TX 5 C12
resource SERIAL_RX 1 A10
resource SERIAL_RX 2 A03
resource SERIAL_RX 3 C11
resource SERIAL_RX 4 A01
resource SERIAL_RX 5 D02
resource I2C_SCL 1 B06
resource I2C_SDA 1 B07
resource LED 1 B09
resource LED 2 A14
resource SPI_SCK 1 A05
resource SPI_SCK 2 B13
resource SPI_SCK 3 B03
resource SPI_MISO 1 A06
resource SPI_MISO 2 B14
resource SPI_MISO 3 B04
resource SPI_MOSI 1 A07
resource SPI_MOSI 2 B15
resource SPI_MOSI 3 B05
resource ADC_BATT 1 C00
resource ADC_RSSI 1 B00
resource ADC_CURR 1 C04
resource SDCARD_CS 1 C01
resource OSD_CS 1 B10
resource SPI_PREINIT_IPU 1 C02
resource SPI_PREINIT_IPU 2 C01
resource SPI_PREINIT_IPU 3 B10
you will notice A02 motor 8 is also serial tx2. these are resources the board uses as outputs and inputs.
it is possible to reassign any resource to most pads.
you seam to have a few problems with FC and firmware so being honest i would suggest you leave alone.
you cannot damage it, if you mess it up all that is required is a re-flash and all back to normal.
if you have an old FC practice moving motor outputs to different pads, this is very useful if after a crash a pad gets pulled of.
1 Like
Hello Brother.
How did you install a pin on the control board?
I bought the pin headders from banggood. just put some in holes and solder from back side.
Hello, I am having Similar issue here.
I have the same Mateks f722 FC with the FC-Hub for PDB, and it connects to betaflight with out a problem with the micro usb on my computer for configuring it. But when i try to flash the firmware, it would not connect. It throws “Failed to open serial port” error. I tried changing the wire’s and different usb configuring softwares but still no change.
Also when i am in config mode with betaflight, it states that there are 3 I2C error at the bottom of the page. Could that be related to this issue?
Thank you,
To flash the FC you need to put in into DFU mode…
Unplug the USB cable.
Hold the Boot button.
Then plug back in the USB cabe.
Betaflight configuration should show DFU in the top left corner.
If not while its still plugged in.
Download and Run
ImpluseRC Driver Fixer tool.
1 Like
Thank you! That helped me get tp DFU mode successfully.
But then I run in to another problem again.
After choosing my board and the latest release of betaflight, I loaded the firmware and connected my board in DFU mode. When I clicked “flash firmware” nothing happened interms of flashing the board. Instead recieved this message:
2019-01-05 @ 05:04:22 – Using cached release information for configurator releases.
2019-01-05 @ 05:04:29 – Using cached builds information for jobs.
2019-01-05 @ 05:04:29 – Using cached release information for firmware releases.
2019-01-05 @ 05:04:30 – Using cached release information for firmware releases.
2019-01-05 @ 05:05:15 – USB device successfully opened with ID: 1
2019-01-05 @ 05:05:15 – USB device successfully closed
2019-01-05 @ 05:05:19 – USB device successfully opened with ID: 2
2019-01-05 @ 05:05:19 – USB device successfully closed
When I checked the firmware on my FC, it is still the old one 3.2.0.
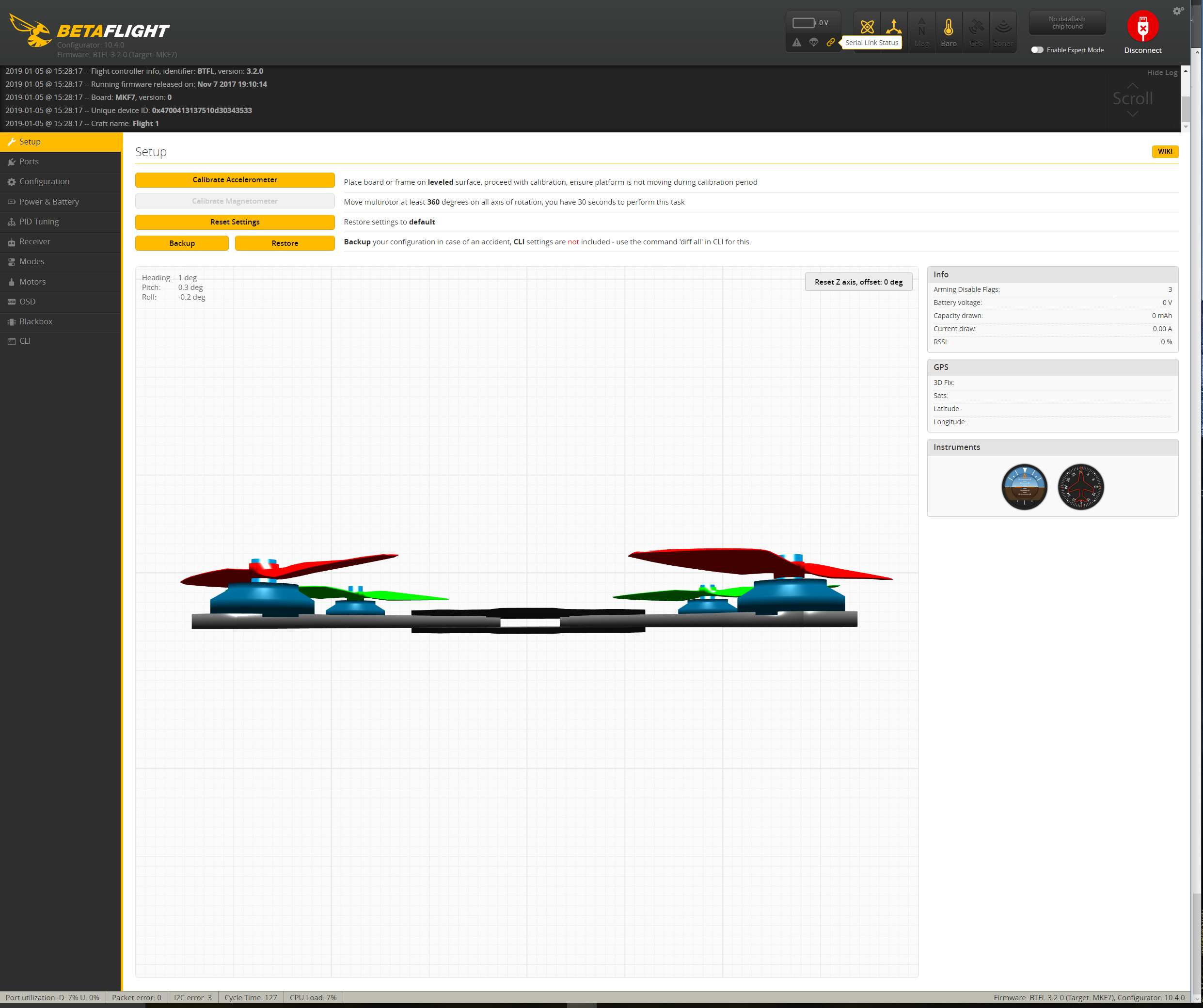
Here is what my BF config look like:
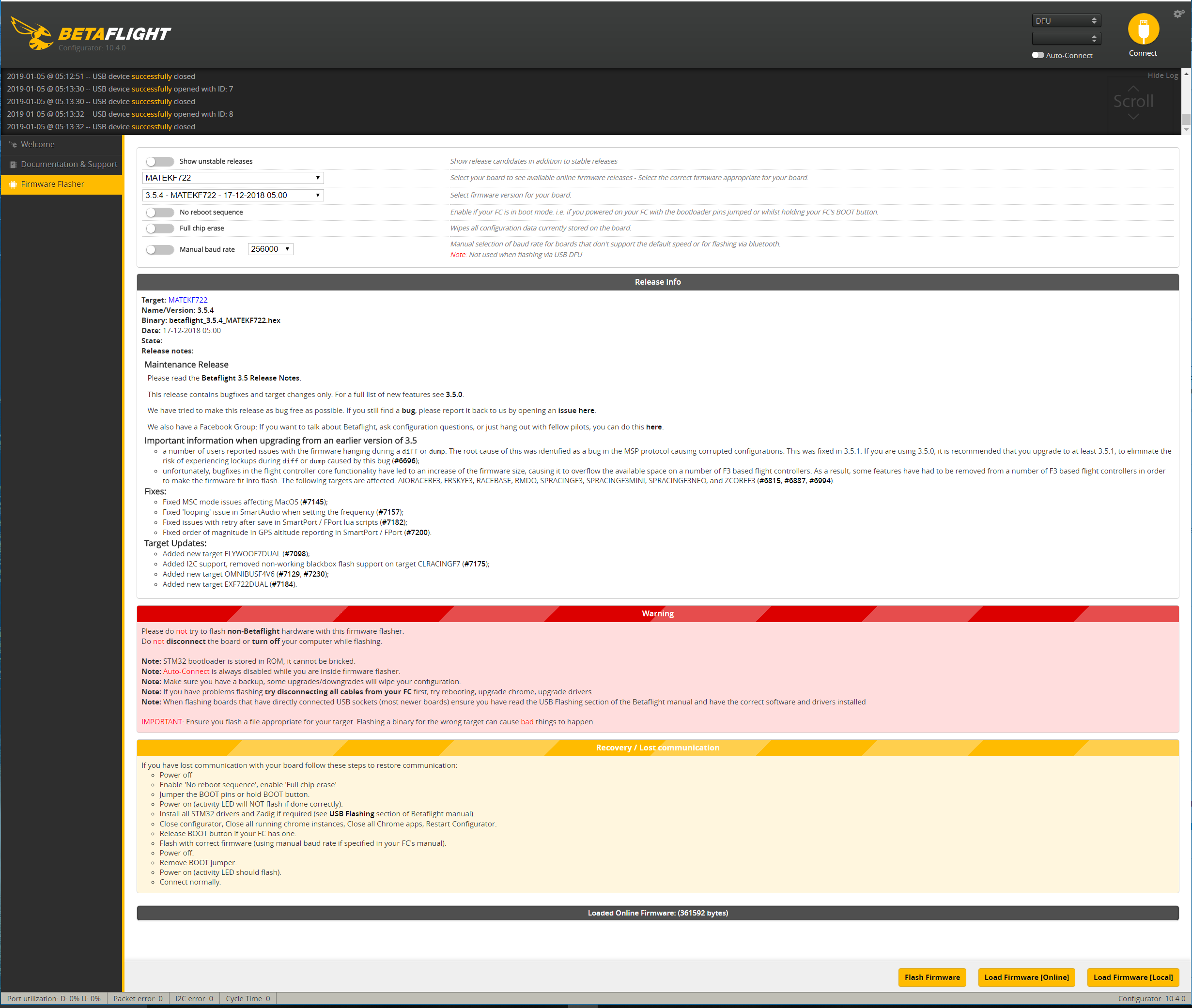
Did you click “no reboot sequence” and “full chip erase”
Looking at you screenshot
It looks like you have loaded the firmware but not flashed the firmware.
Also do as @blackhole says and select those two options
1 Like
Yes I did load the firm ware and also selected flashware.
I have also tried selecting “no reboot sequence” and “full chiip erase”.
After I load the firmware and click the flash firmware button, it wouldn’t flash the board. and the upload status bar doesn’t show it uploading or anything. I recieved this codes:
2019-01-05 @ 05:04:30 – Using cached release information for firmware releases.
2019-01-05 @ 05:05:15 – USB device successfully opened with ID: 1
2019-01-05 @ 05:05:15 – USB device successfully closed
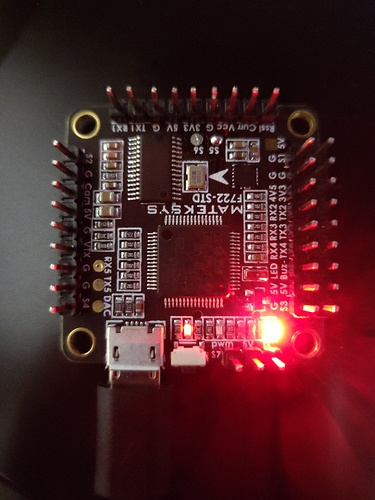
Also, when it is in DFU mode I see one bright red light and one faint red light near the button just like @blackhole did on this pic.
more information on what i am getting from the board:
-
when i connect betaflight in configuration mode, I see that I have 3 I2C errors that I can not figure out what caused them or how to get rid of those errors. (i don’t have anything connected to the SDA/SCL pins)
-
and is the “serial link status” bar on the top of BF interface, right under battery status bar, supposed to flash at a random rate or is it supposed to be ON uninterruptedly? because mine blinks.
Thank you for all your help!