Here are the screenshots you requested.
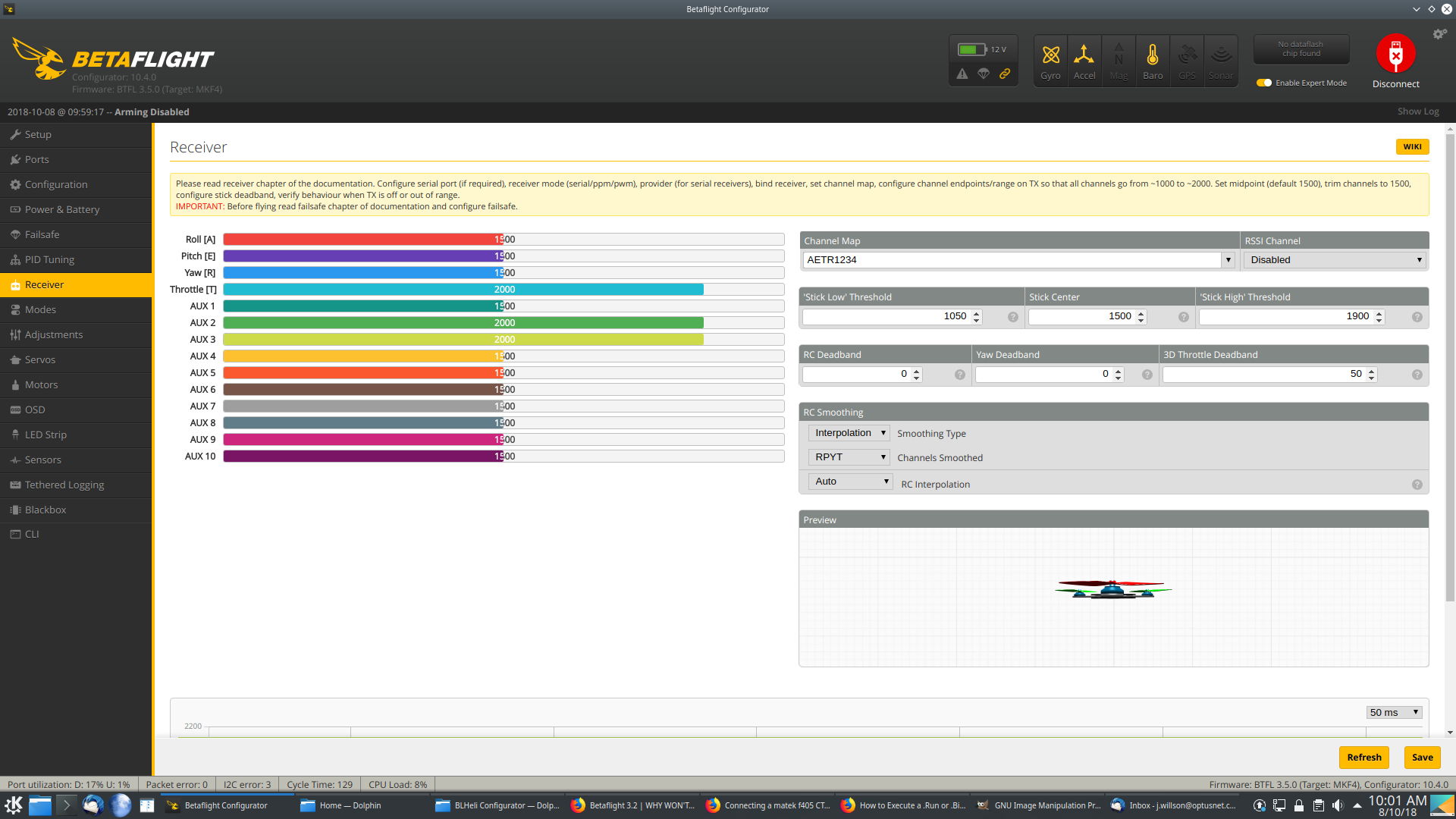
I should point out that Aux 2 and 3 are only on full (as shown) when I flip switches ‘C’ and ‘D’
The Yaw is actually a connection from a servo motor directly to the RX channel 4. That works perfectly and I can switch the yaw from side to side, going from 1000 to 2000 via the TX.
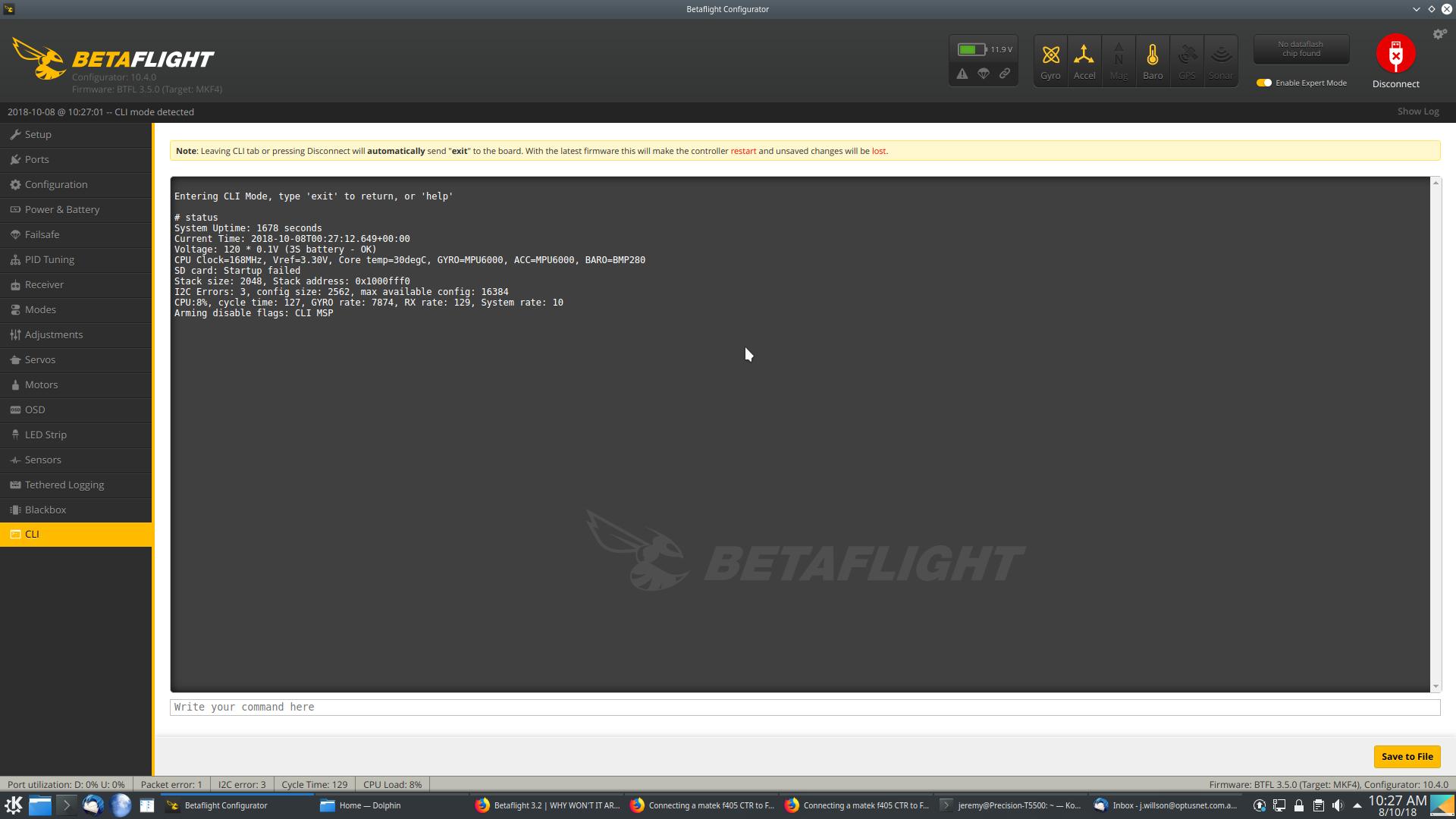
I also include a shot of the CLI after a STATUS query