Hello
I am not only a newbie, but I am also old, so this will be quite a challenge for anyone wishing to help me.
I have managed to ruin a fair bit of kit so far, and it is getting quite expensive.
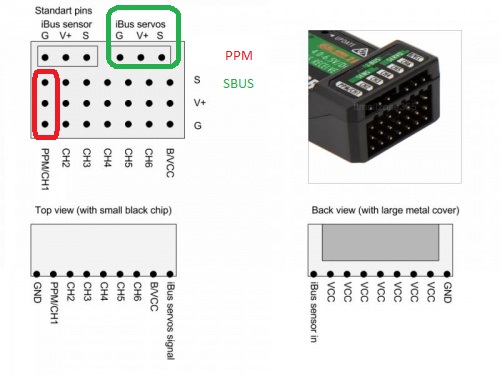
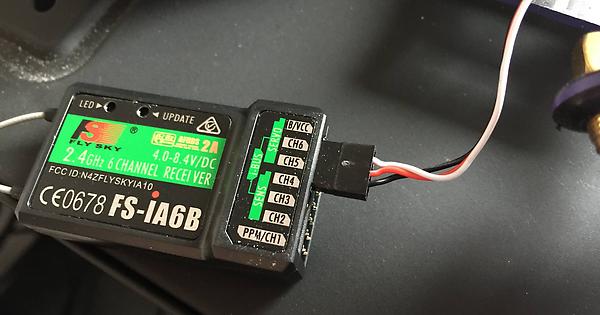
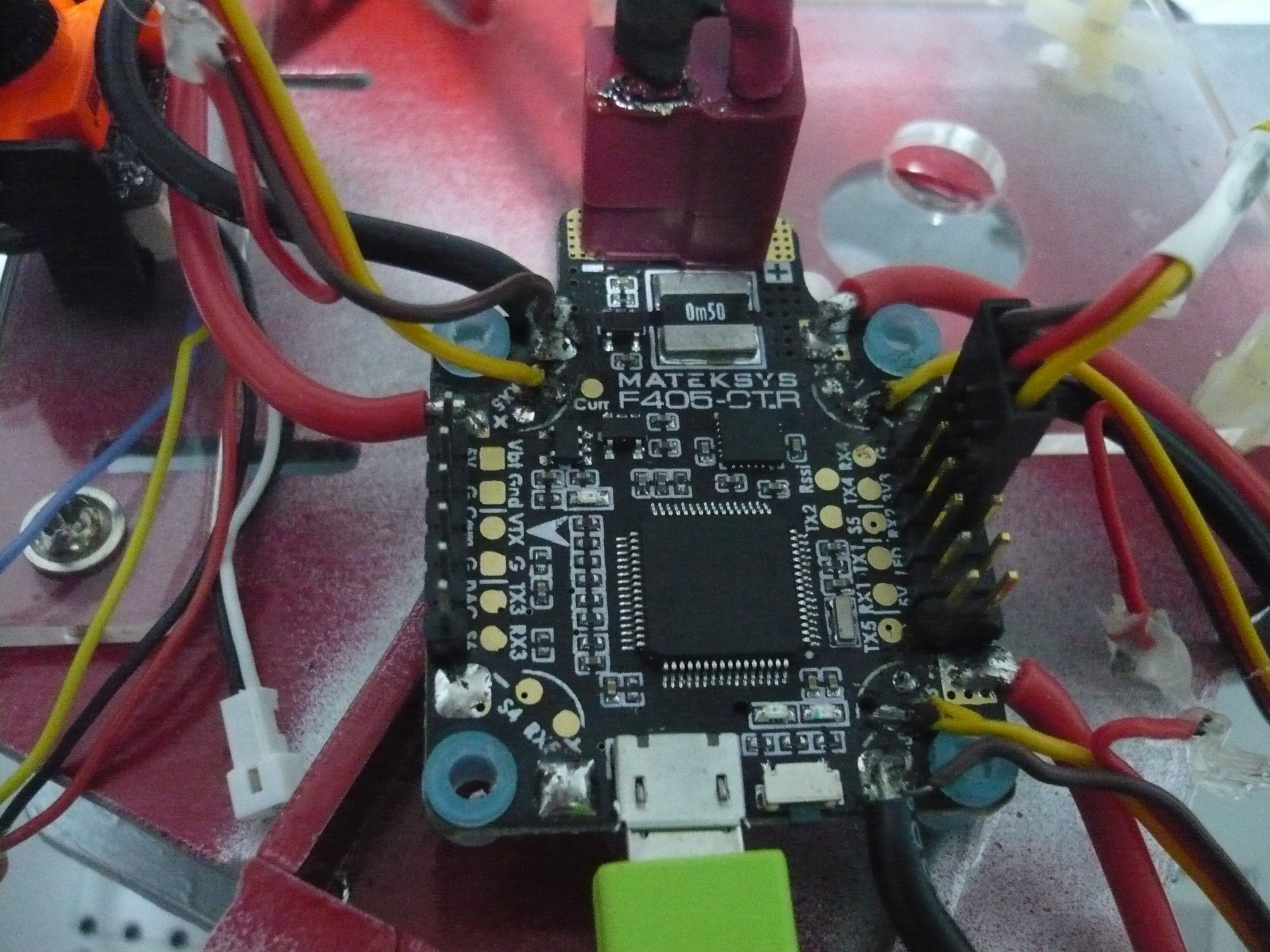
I have a Matek F405 CTR FC and I would like to hook it up to a FS-iA6B receiver. I keep getting lost in the terminology.
I can get the motors to turn on in Betaflight but the transmitter is not connected. So basically, How the F@#$ do I connect it to that board. I have read the manual loads of times and also looked online for other help but so far my peak accomplishment has been miserable abject failure, and getting worse.
I am using cheap parts to make a tricopter. The specs are:
Motors: A2212 1000KV
ESCs: HP 30A
I have connected each ESC’s wires to their respective Pos and Neg positions on the board.
I connected the signal wires to their respective S1, S2, and S3 pads
I folded back and insulated with hot melt glue, the small red wires from the ESCs on each pad
I modified the CLI in Betaflight as per Matek instructions (which I might be able to find again, but it would take a while)
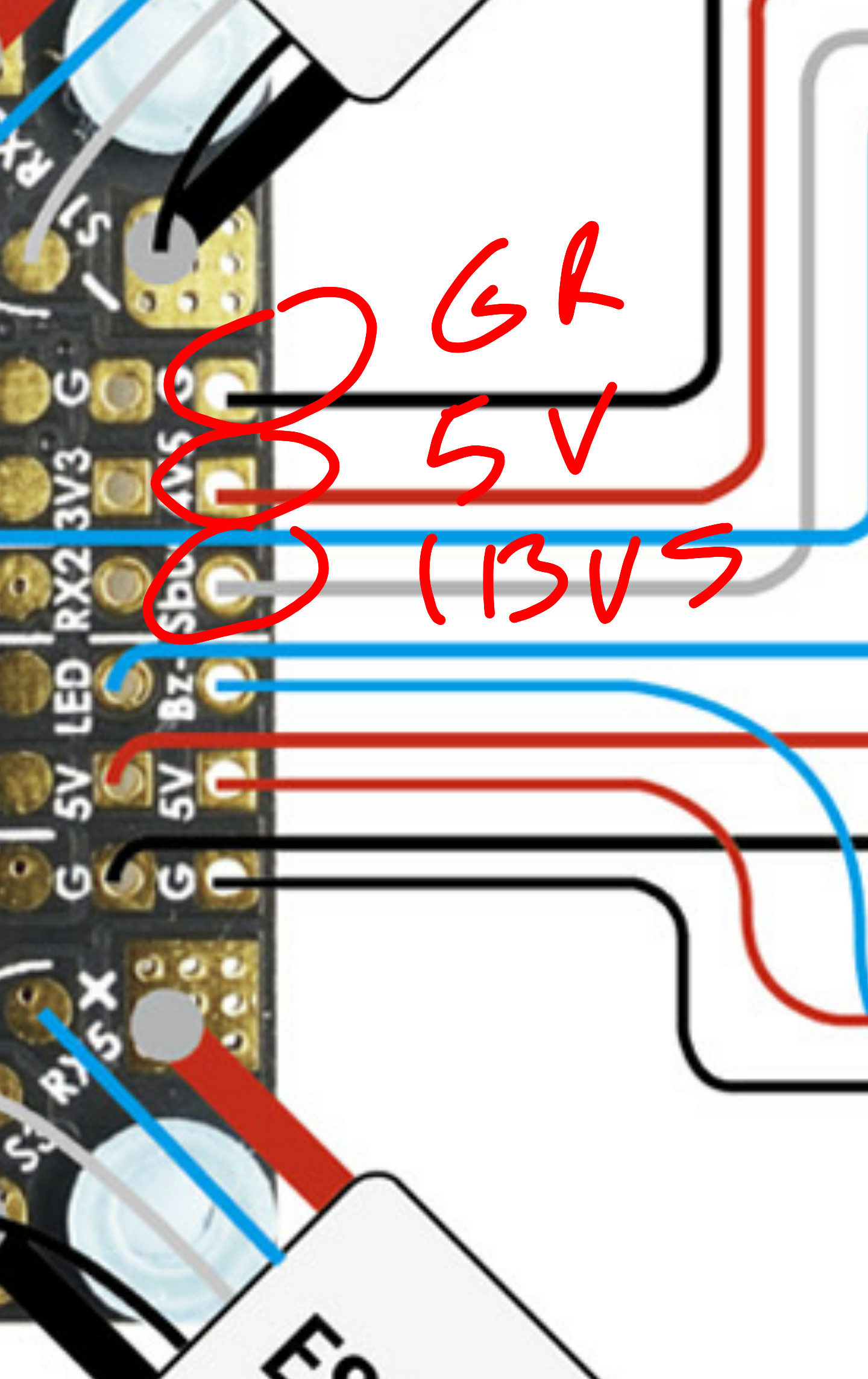
So, my problem now, is how to attach the receiver to the FC so that they can talk intelligently to one another.
General instructions don’t seem to work too well for me in this hobby, I need something along the lines of:
Attach wireA2 to Matek board at position () (here I may well need a picture of the board with the wire shown in place). and attach the other end to position A1 on receiver.
A sketch showing all the required connections would also be great if possible
I would be very grateful to anybody who can help me in this as I have been stuffing around with this for well over a month now.
I’ll worry about a camera later.
Thank you