I have recently installed a pixhawk on my 250 quad, I previously posted about instability but that, I believe, was due to the esc’s not the pixhawk. Currently the motors all spin appropriately if I hold the quad and tilt it. However on trying to actually fly the quad it seems insanely unstable and gyrates violently until it flips or crashes. I think this may be to do with the PID settings (overshooting during a transient phase is normally down to too large a value for Proportional gain). Has any one ecountered any thing like this or should I just tinker with PID.
My setup:
250 frame
Flight controller - Pixhawk
ESC - QBrain (Quattro) 4 in 1
Motors - DYS BE1806 2300KV
Props - 6*4 (a little large I know)
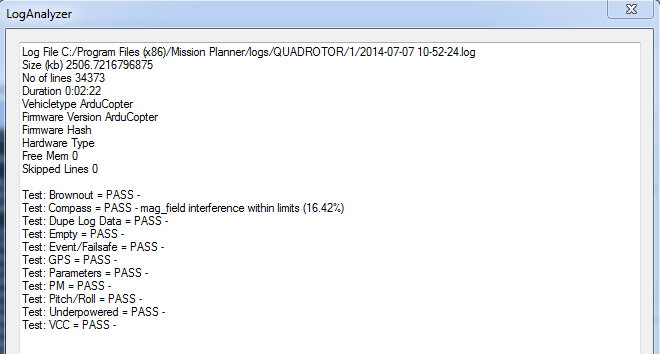
The most common cause is actually vibrations. But it would be great if you can post some graphs showing your accel and gyro readings. But also maybe a flight video. Also after your flight have you possibly tried to run the auto analysis via mission planner? As that provides the most common causes for problems with your flight performance with pixhawk/arducopter
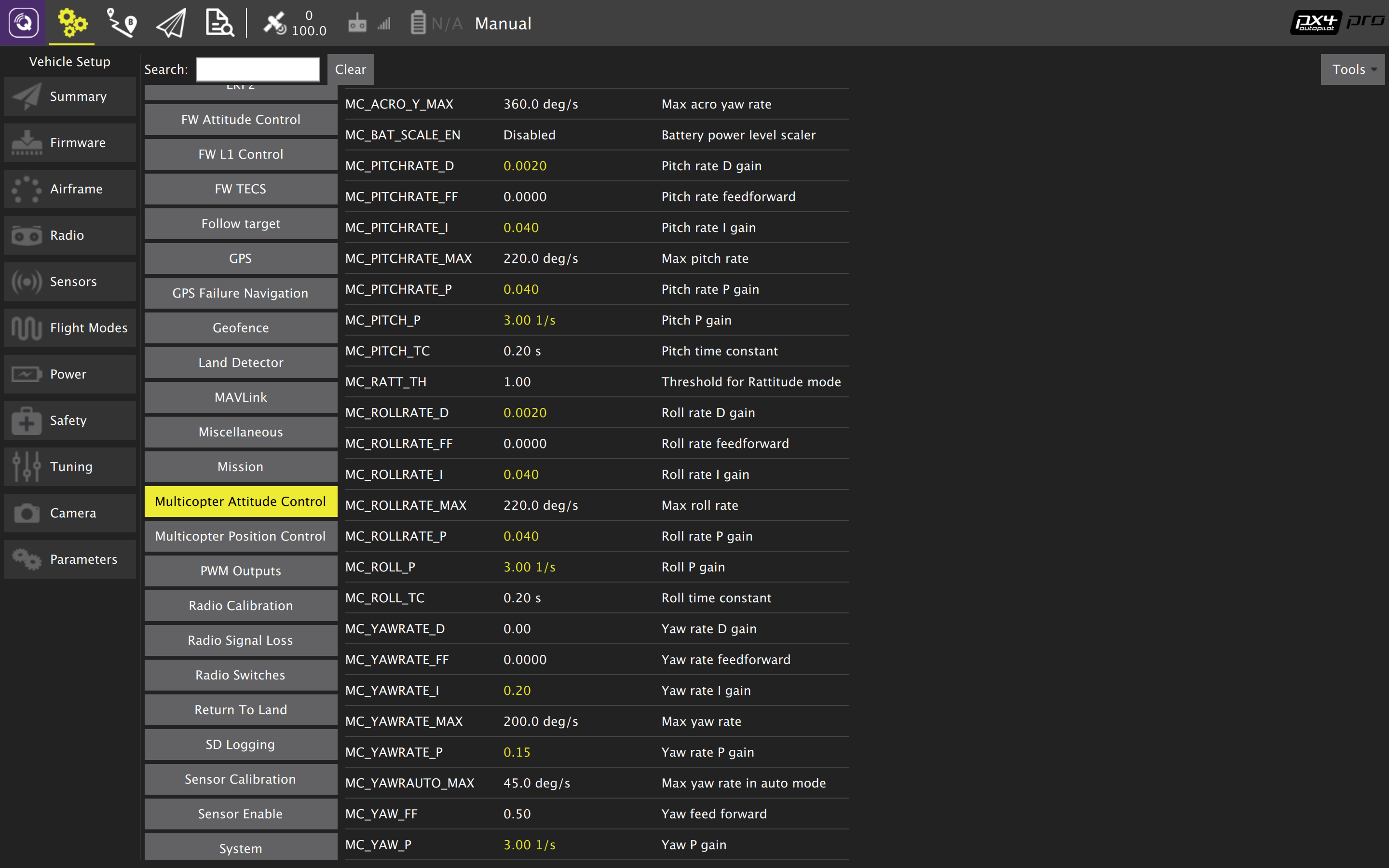
I had the same issue with a QAV 250 with a pixhawk mini. I had used the PID settings recommend on px4.io but they were too much and it was over compensating.
You need to re tune the PIDs which is a slow process. If you want I can send you a screen shot of what I ended up with.