Hello all,
New to forums, new to FPV, Some experience with Hubsan x4 mini drone.
So recently I picked up the RTF version of the Emax Nighthawk Pro 280 because I wanted to explore FPV more (After modding my Hubsan heavily to FPV) I thought this would be a great start. In retrospect, I think it’s a bit too big, but that’s a topic for another day.
My issue is this; PID tuning. I’ve flown the Nighthawk a handful of times LOS. When it hovers, it has a slight rocking/oscillations, which I found through research could be the PIDS. (I’m aware it could be motors, unbalanced props and other stuff, I’ve already gone down those routes).
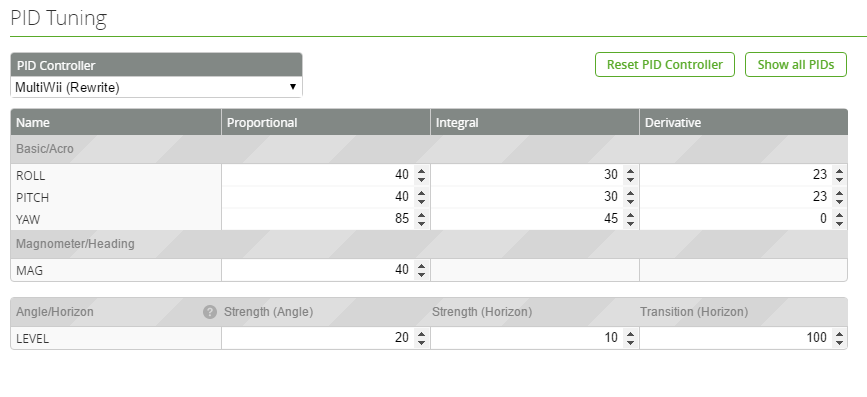
Stock PID’s:
So I booted up Cleanflight and put Gtune on. I’ve tried this with both Horizon mode on with Gtune, and Acro mode + Gtune. After flying around for around 3-5 minutes, it seemed to be flying differently. Okay, great! Gtune is doing it’s thing.Except when I take it out of Gtune and put into Angle/Horizon, it just shakes a lot. A lot more than before! Here’s that it basically did:
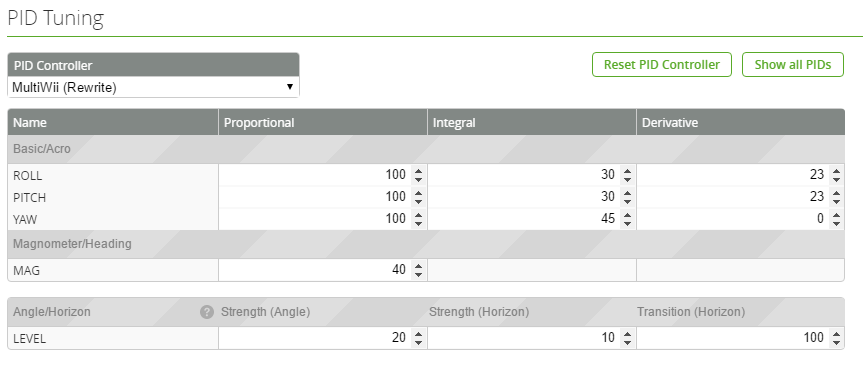
Gtune PID’s
Okay? Yaw seems good because it yaw’s very slowly! So after nosying around the internet for a while, I kept seeing people having PID values of “4.3” or “0.011” and similar.
So firstly, why are mine this absurdly high compared? Is it because I’m being a derp? Or becuse it’s a different board/FC/something else?
Secondly, what would you all recommend as PID values for the Nighthawk? The stock ones seem relatively okay, but the quad is a little jittery and doesn’t feel dialed in.
Thanks, Bill.
Welcome to the hobby and to dronetrest, and also congrats for coming so far without asking any questions 
You are on the correct path with PID tuning, and dont get too confused about the different numbers, as some of the older versions of cleanflight used different number conventions. The more recent versions (cant recall exactly what version) did away with the decimal places. So the best place to start would be to find someone who shared the parameters and if its from an older version just remove the decimals, so 4.3 would become 43. Also to make things abit more confusing you can change the type of PID controller. Many people (including myself) prefer to use LUX as its built for faser processors (32bit that is pretty much standard on any flight controller nowadays) and is more precise.
as for the Gtune, it sounds like it might of not saved the parameters correctly:
- Arm
- Enable G-tune
- Lift off slowly, avoid stick inputs (Roll, Pitch / Yaw).
- Eventually the copter should fly well. Perhaps do a few throttle punch outs and fly around a bit. Take note if each punch out seems to become smoother with less oscillation and the overall flight performance.
- Disable G-tune
- Land
- Disarm, but don’t power off.
- If these are desired results then either:
a) Connect cleanflight configurator review and save the configuration. or
b) Enable G-Tune again to save settings.
- Power off.
Lastly if you cant get this figured out just let me know and I will contact Emax to get their official PID’s for the latest version of the nighthawk which should be a much better place to start.
Hello again!
So following your advice, I have gone out and re-tried Gtune for an hour or so. It did the exact same thing again, merely placed all the P PIDs to 100 and didn’t touch the other parameters. Despite looking better in Acro mode, once I turned Gtune mode off and went into angle/horizon mode, it was again jittery. I’ve checked the accelerometer and calibrated it, it seems fine. Magnetometer was calibrated to and looks okay. (I’m looking to fly Angle/Horizon modes for a while before i do Acro mode. I want to get more comfortable with FPV flying first)
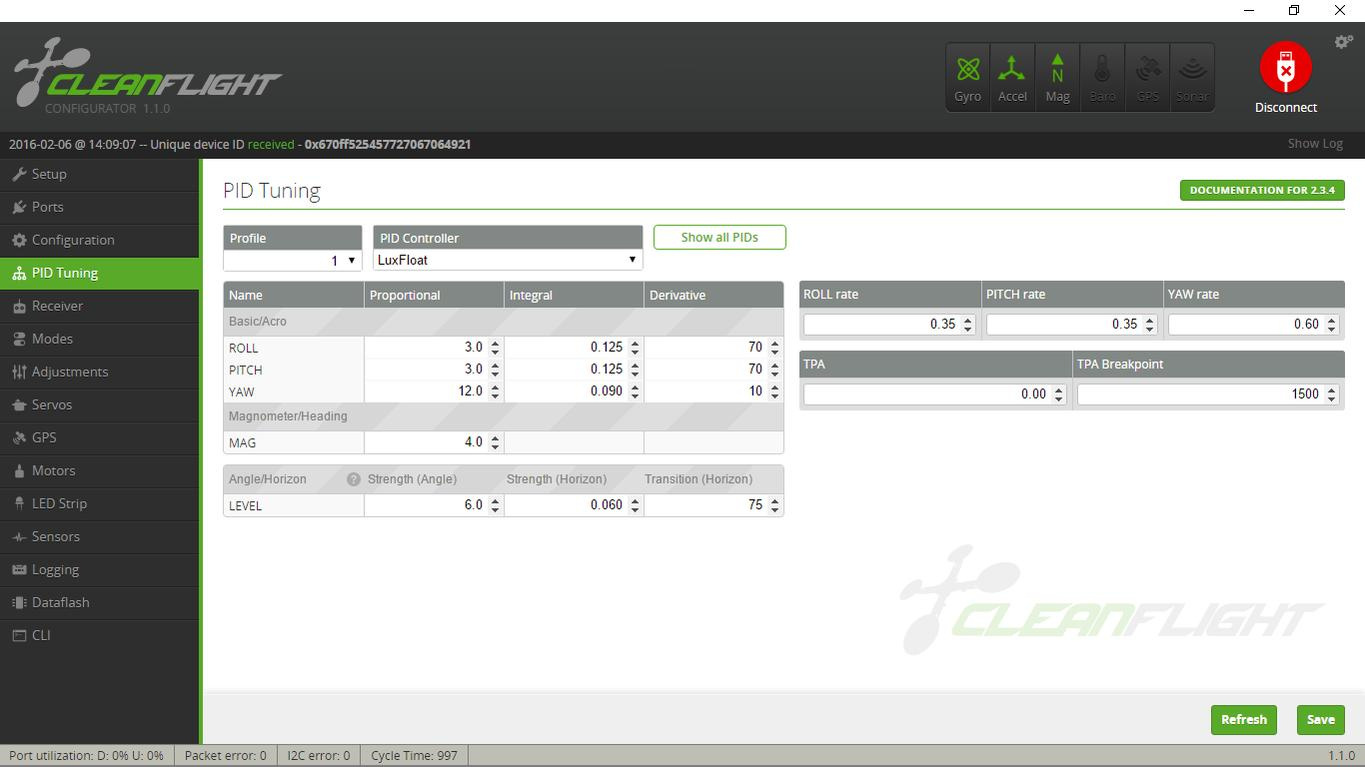
The next thing I want to look at is MultiWii vs Luxfloat as you’ve mentioned it and I have no knowledge of it. Hopefully I will be doing that later today! But as you have offered, I would love the Emax official PID’s too as that would at least give me a solid point to begin from!
On a separate note: during tuning I inevitably crashed a few times, and because I set the RX antenna up wrong, I have now snapped it. I have less than 6cm left! Would it be safe to strip back both ends and solder them back together? Or would it be better to pull out the receiver unit and install a new one?
Thanks, Bill.
Sorry about the delays, still waiting for emax to send the PID values, but the ones below should be a much better starting point. Also note that those PID are for LuxFloat.