im having a nightmare with my new night hawk its wobbling all over the place its been a week since ive had it not been able to fly it been giving me a right headache
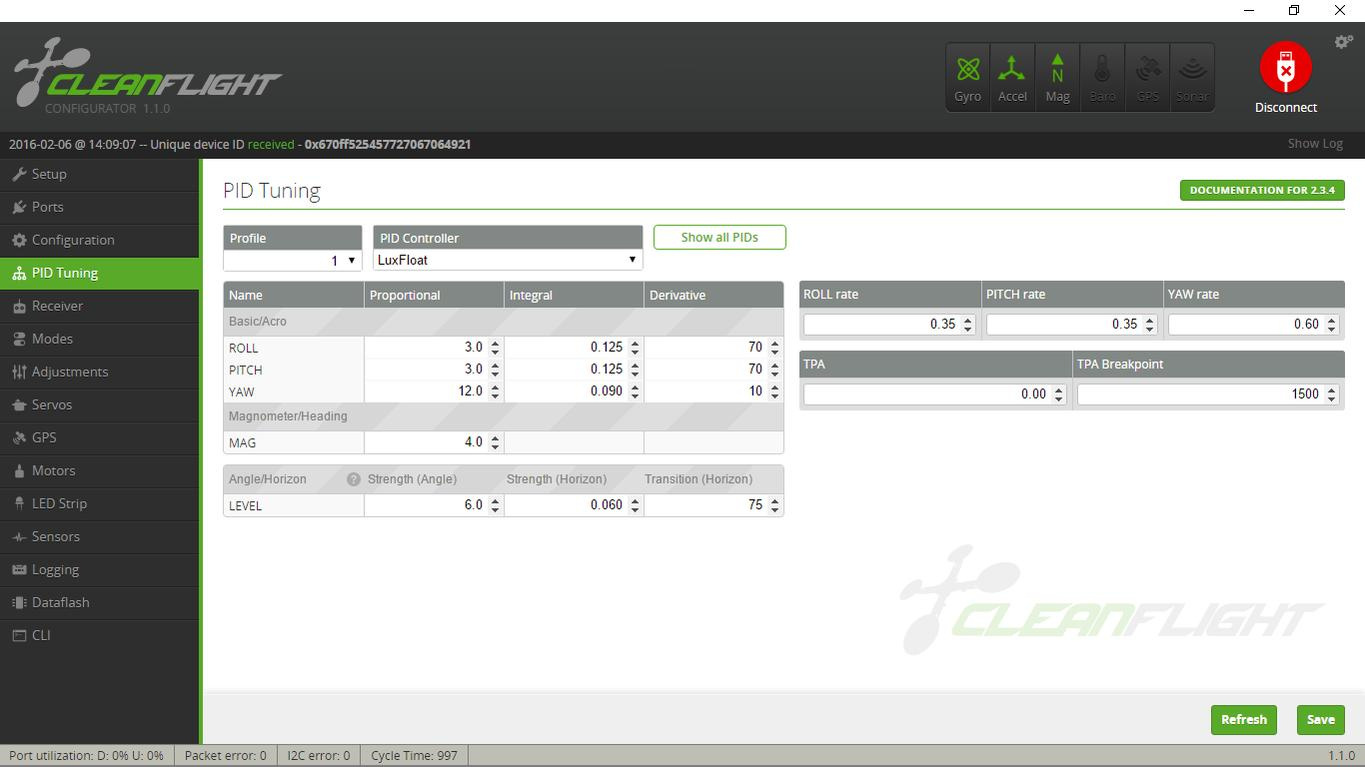
Hey, looks like you have some bad PID settings on your quad, see screenshow below for some suggested PID values. Also note that the PID controller is changed from multiwii to LuxFloat as its generally better:
Thank you i will apply these as soon as im home i will let you know how it goes thanks (did you watch the video)
nope with these settings it just wants to flip over 
I’ve been having similar issues with the same quad (Can be seen in another post)
Make sure your props are balanced too! I know the stock ones weren’t very well balanced, but I broke mine. Change them out for some more durable balanced ones. I’m going to try the new PID’s that UT are recommending me as I’m flying stock PID’s atm too!
Horizon mode seems to be more forgiving than angle mode, so try that out too. And lastly, Acro mode will be a lot more stable, but will have bouncey characteristics when changing positions.
Let me know if you solve it, and I’ll do the same! I’m going to try the new PID’s see what I get from them.
those new pids were no good
I found another set of PID’s I wanted to try, they looked like this:
Name --------------- Proportional ------------ Integral ---------------Derivative
Roll --------------------- 42 --------------------- 50 -------------------------35
Pitch --------------------50 -----------------------58 ------------------------35
Yaw ----------------------65 ----------------------30 --------------------------5
Level --------------------90 ----------------------10 -------------------------100
Roll Rate: 0.75
Pitch Rate: 0.75
Yaw Rate: 0.90
I haven’t had a chance to try these out yet, but curious to see if these will help you out. Not sure if they used LuxFloat or Multiwii though. I got these of a video from YouTube where the guy was throwing the Nighthawk around like it was a tiny acro drone! So it may be a bit touchy, just drop the roll/pitch rates. I’d leave the yaw rate higher as the Nighthawk is slooowwww to yaw!
im about to try it
that was worse like a heli without a rear blade its getting to the point where i dont think it will ever fly tbh really not happy at all
It sounds like something strange is going on with your nighthawk as those pids should work fine, atleast to acceptable levels. Have you installed the latest version cleanflight firmware onto your nighthawk? Also have you changed any of the advanced PID values that change the horizon hold flight modes? Also it might be a good idea to wire the report on your board to reset all settings to default and start again incase some other setting is messing things up.
yes all up to date nope havnt touched the pids
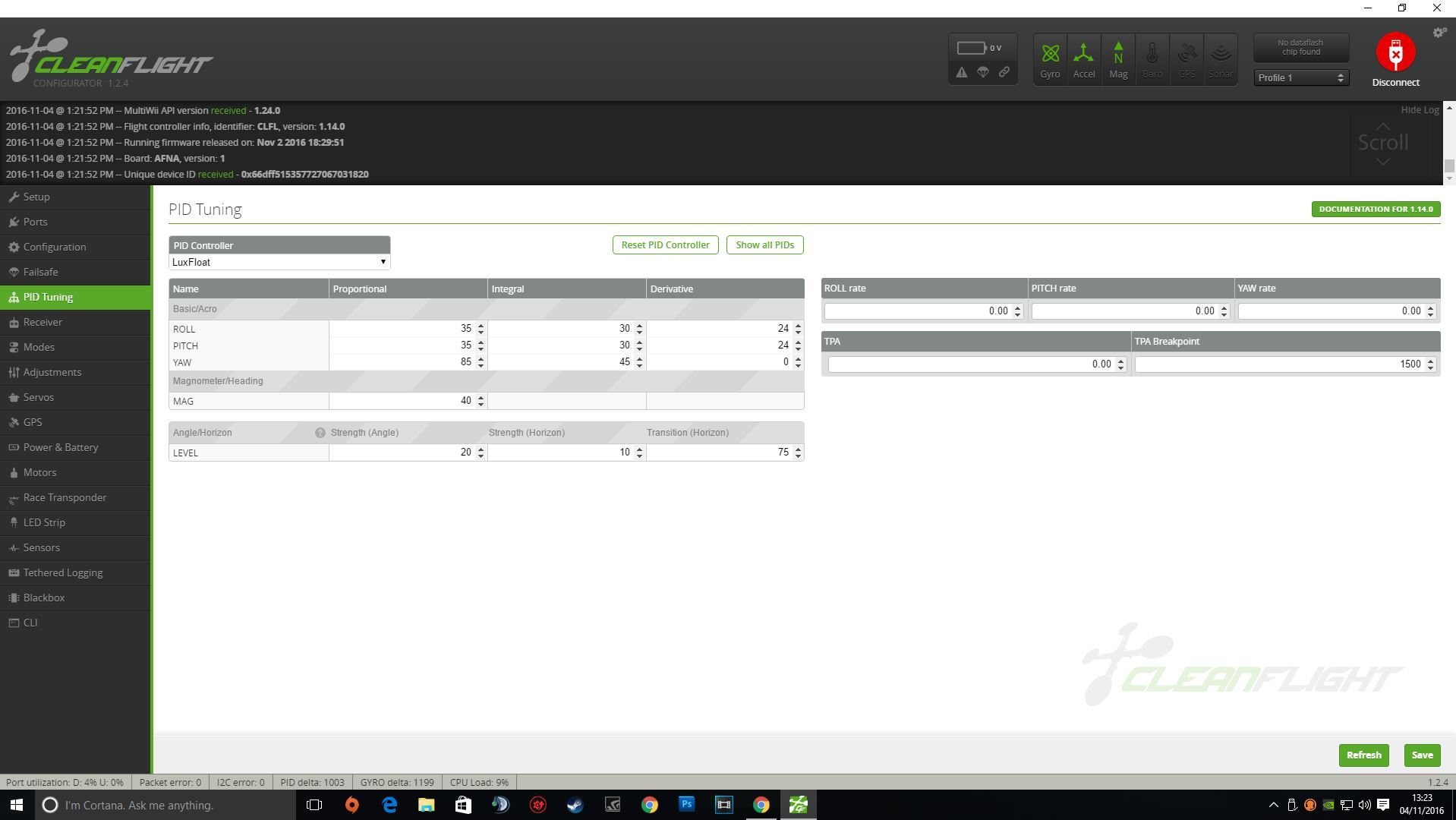
it doesnt help the fact that you are using an older version og the config a they no longer use (0.0) its just (00) now
looks like you need to soft mount the FC with some o rings over and under it  should help a little bit…
should help a little bit…
allso try raise p gain and i gain… d gain is the last thing you raise…
its a nighthawk pro eveythink is on one board
raise the p AND i gain seemed more stable when i put it to the settings above in pic
try raise i gain to like 50 in all axis. and raise p a bit more to like 4.5 on pitch and roll. ifit shakes really fast then lower it like 0.4 points…
or try flash it with betaflight…
all to 50 ?
roll
pitch
yaw
Try like 4 on roll P
6 on pitch P
8 on yaw P