First off well done on your first build 
Your correct balance is your problem.
From the videos I’m not sure you motors are spinning in the right directions… PLEASE take you props off for testing motor direction.
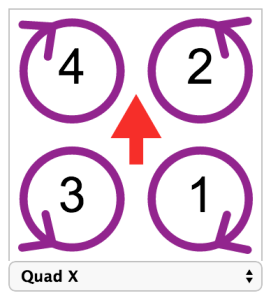
All the motors should spin inwards
Top 2 inwards towards the front
Bottom 2 inwards towards the back
Your RX pin out doesn’t look right to me
@unmannedtech
1 Like