Looking forward to seeing/hearing from you about how it flies and how long you can fly for.
I think the GPS setup will be interesting as not too much betaflight specific info that I have seen (but I have not looked much either since I dont use GPS on betaflight)… although the GPS recovery mode in 3.4 is a valid reason to start using a GPS to be fair.
Well yesturday I had to fess up to @unmannedtech that I killed the Airbot Fireworks v2 FC he had sent me for this build.
I recorded the finished wiring video and then went on to the configuration video covering the runcam, FC, ESC, VTX etc… but only to find that the FPV feed was black… No OSD, no camera.
A black FPV feed normally mean no video is being received from the camera and no OSD mean no feed from there either.
When I soldered the video out from the FC to the VTX I lifted the pad killing all video out to the VTX.
I tried to fix it and it did work… until you knock the wire then it goes again
I could maybe get it to work again… but its not worth the risk flying with the chance of the FPV feed going black is never going to end well.
So I ordered a new FC that should be here in a day or two.
The good news
I can finish all the build and configuration videos.
The bad news
I have to fit a new FC with this being an All In One (AIO) board I have to de-solder everything and do it again.
What did I do wrong
I have a variable heat soldering iron were I can adjust the temp from 250 - 450c I court the switch and turn my iron up to 450c
What can I do next time
Check the tempeture each time before using the iron or buy a better iron.
Maybe this is the excuse I need to get a TS100
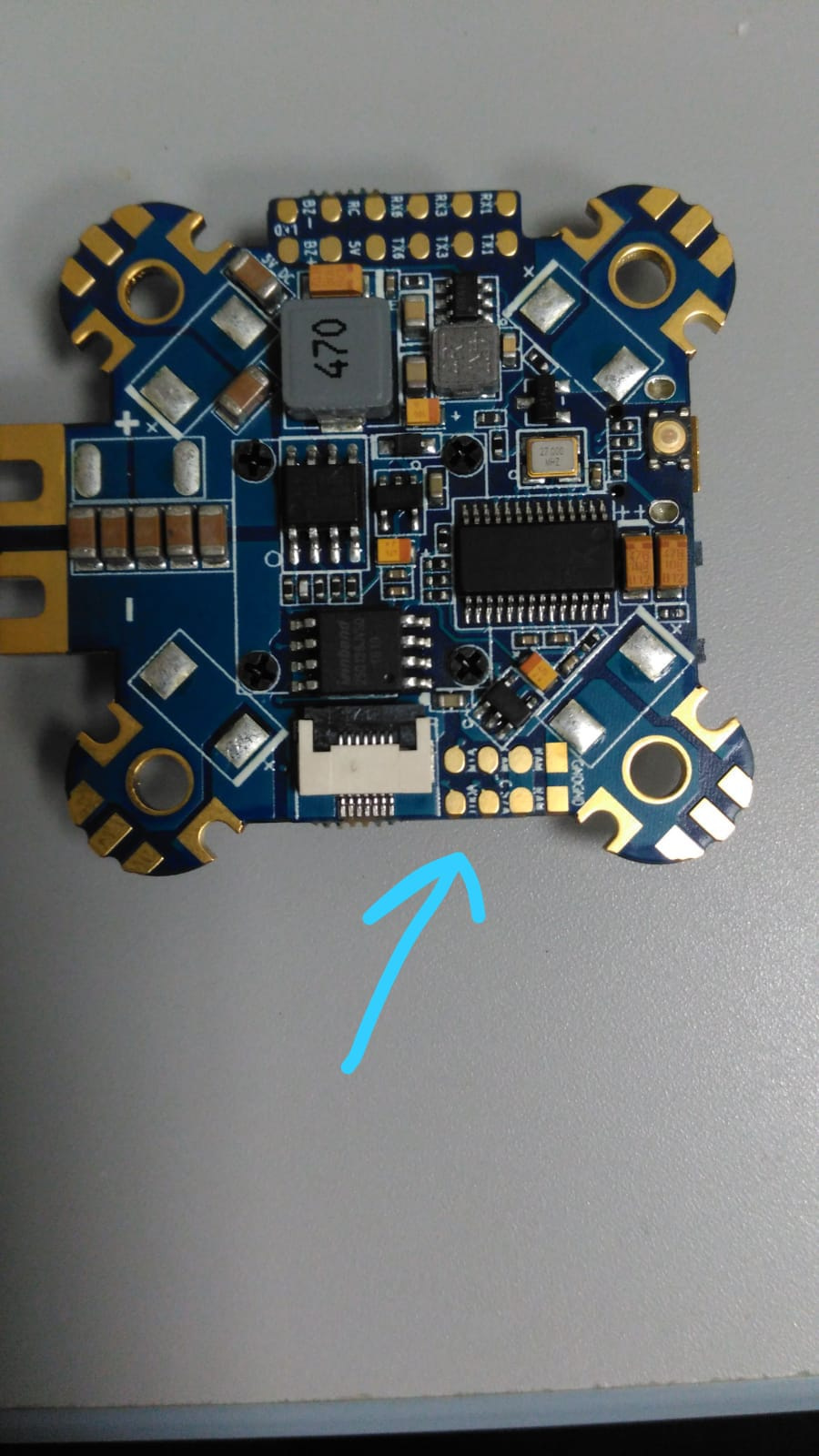
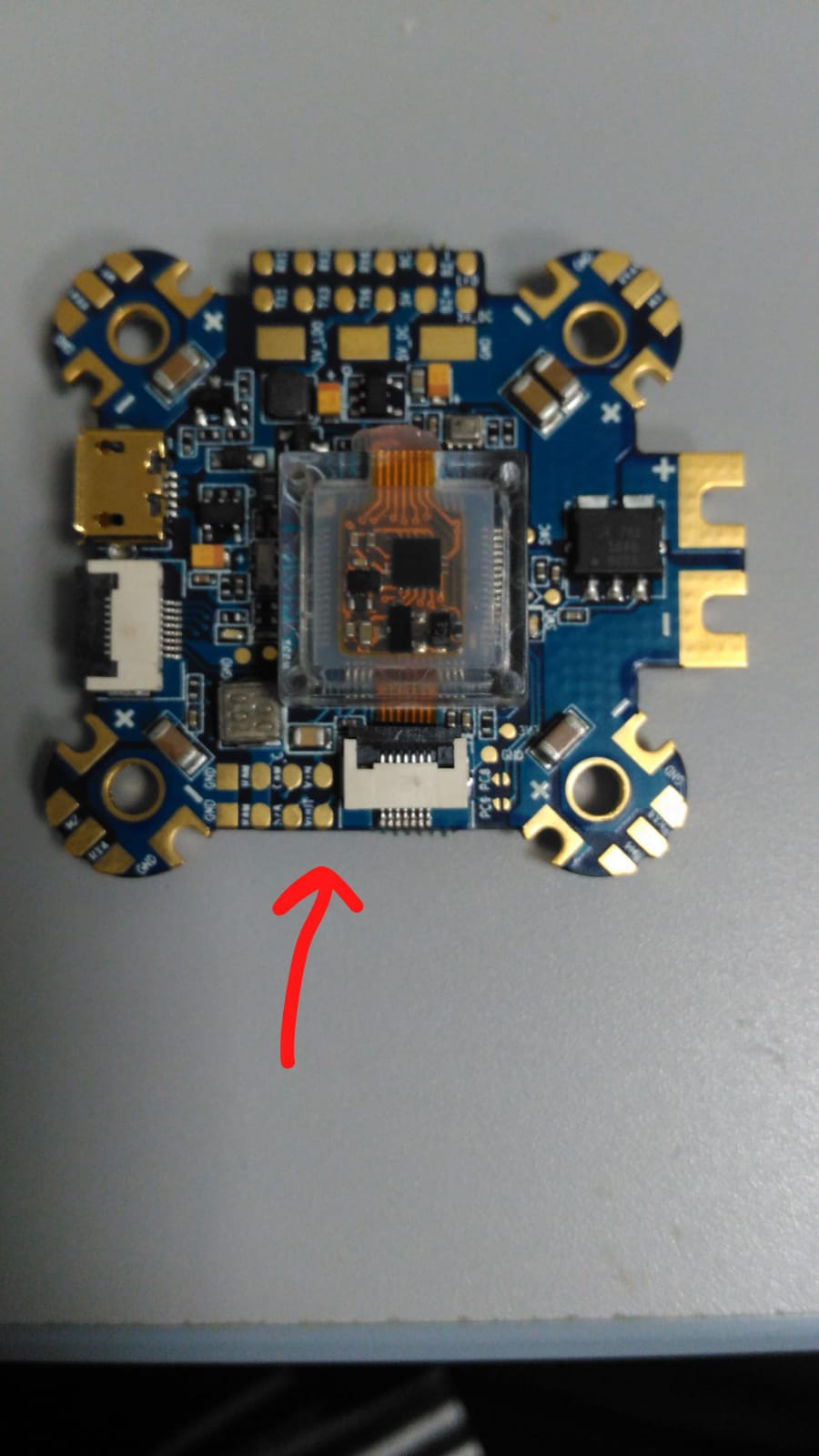
Is a repeat of all the solder pads on the top of the board… including the OSD video out pad.
So I don’t think I needed a new FC.
My job now is to lift all the hardware off the frame and solder onto the OSD pad on the under side of the FC.
Its a bit of a hassle but easier than soldering in a whole new FC.
haha that’s how it always works… but if you want to return the replacement FC just let me know But if you fly anything like me its only a matter of time until you will need to replace the FC!
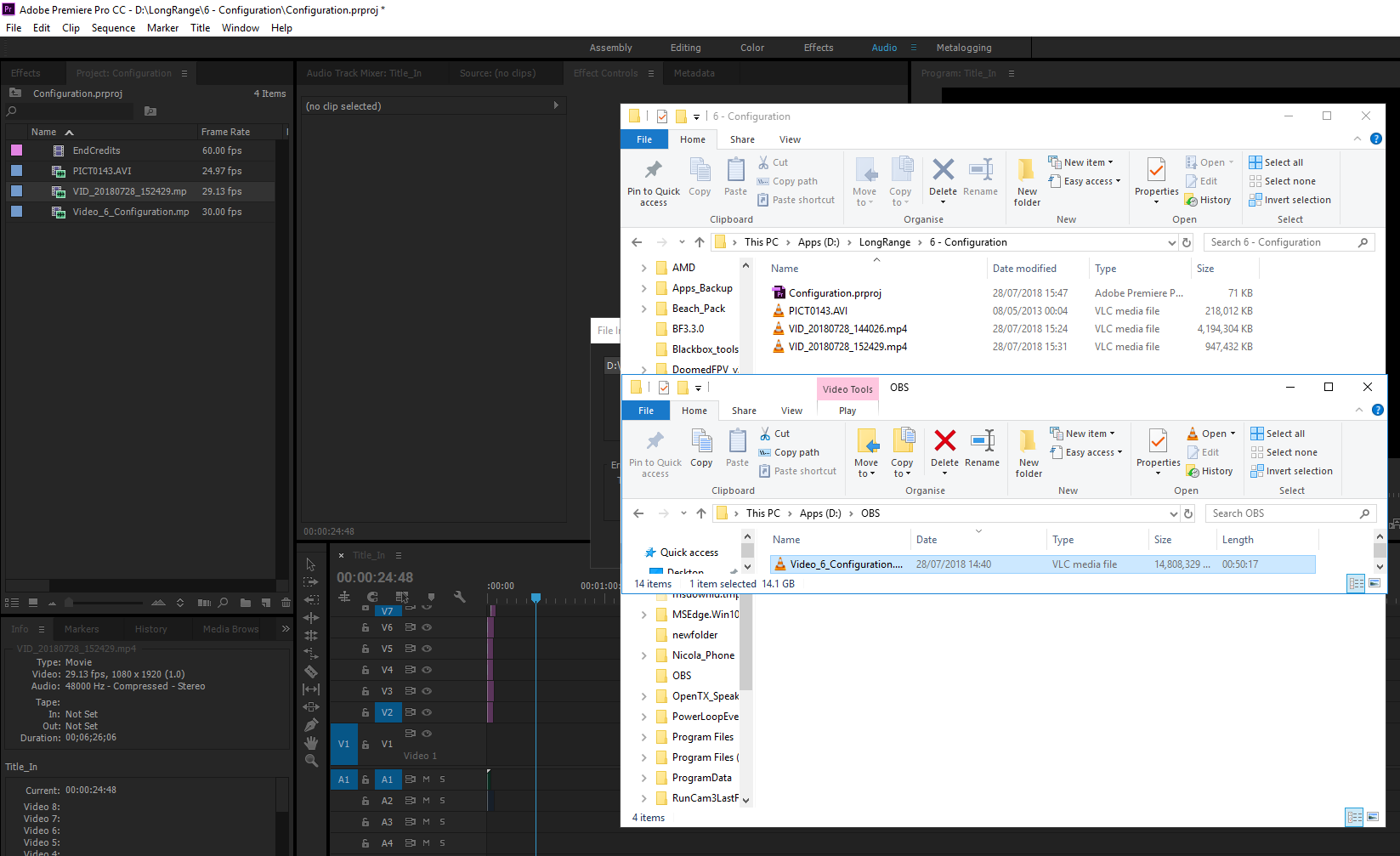
I’ve just finished recording the Configuration video for the playlist…
Its currently 50 Minutes long… But with some editing and index links it should be fine.
Configuration Video
The configuration video is being edited but one of the videos (the one above the quad) was corrupted so I’ve lost that footage
So I have to redo some of that footage.
First Flight
Well it flys, flew a whole pack no issues no hot motors and didn’t fall out the sky.
Very RAW Footage
However
It wasn’t without its problems…
No GPS signal (need to check mounting, something is blocking the GPS signal)
Lots and Lots of oscillations during the first flight, then I was unable to arm and fly again on the second pack.
I kept getting calibration errors, I did fix this by changing “gyro_calib_noise_limit” from 48 to 100 but now that doesn’t work…
After spending the night fault finding, I believe the gyro has failed and I’m now unable to arm with a PID loop higher that 8k/8k (so no 16k/8k or 32k/16k which this board can do)
The only option now is to replace the whole FC (good job I have that spare)
So the current plan.
Finish the configuration video.
Start/Finish the first flight video. (Phone Camera footage (maybe to bad to use), DVR and HD footage)
Video the failed Gyro video (to help others)
Remove and fit the new FC.
Redo the first (second) flight video.
Not all builds go as planned.
Use them as a learning experience learn from them, don’t be beat by them.
Fixing faults is a good way of learning, how to fault find and repair.
You should be able to replace the IMU box on the Fireworks V2 as that is the nice thing about them… you could try to swap the gyro box from your second FC to the one already installed… although depending on your soldering it might not be possible since you need to get the bottom to unscrew the gyro box.
The Bad News
I’ve had some bad luck on this build and for one reason or another the Fireworks v2 FC’s have not worked for me.
The Fireworks V2 FC where either damaged or just didn’t like something on my build.
The gyro’s where getting a lot of electrical interference when the Lipo was plugged in and just refused to calibrate and arm.
I tried two different flight controllers and a new gyro but nothing seemed to work.
The only thing that I found to work was running the RunCam, Crossfire, GPS and VTX off a separate BEC connected directly to the lipo. Only then when would the FC arm.
It looked like anything running from the FCs 5v or 9v rails caused interference to the Gyro and stopped it from working.
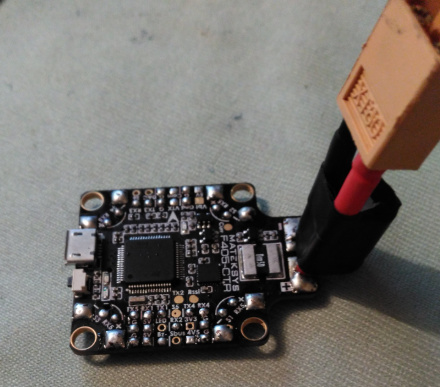
And I’m happy to report this FC is running and the LR build now fly’s… its in need of PID tuning the default 3.5.1 PIDs seem to oscillates A LOT ( I’m working on PID tuning now )
So why this FC
It has a SD Card slot ( good for black box ).
Its has enough UARTS ( 4 = RunCam, Crossfire, GPS, VTX ).
It has separate pads for ESC telemetry.
The only down side to this FC is its Gyro max’s out at 8k /8k ( so no 32k or 16k PID loop )
As this build is a long range cruiser I probably won’t even notice the difference nor will it make a difference to its flight performance.
I’ve have to release an update video to capture the changes in the build and redo most of the configuration video but never mind.
Summary
The build is still on going moving now into flight testing and PID tuning.
More information and videos to follow.
Don’t let a build beat you, find the problem, find the fix and move on.
So no matter how much I PID tune I can’t stop the vibrations I’m seeing in my FPV and HD feed.
ITS LOUD – Sorry about the audio its from the RunCam Split v2 – ITS LOUD
After watching a YouTube video today on Betaflight 4.0 and its filters I’ve come to the conclusion its not the PID tuning but the build its self.
The fact that I’m running a 7 inch frame with 7 inch props on low KV motors all adds in vibration.
So I’m going to flash the board with Betaflight 4.0 ( and hope its stable enough ) and try out its new and improved dynamic filtering and see if I can’t get this build to fly smooth.
Side Note:
I’m going to be trying a pre-release / development build of betaflight. These builds may not be completely 100% stable.
Try these betaflight builds at your own risk. Anything can go wrong resulting in a simple crash or a fly away and if your on a long range flight that could be a long walk.


 on the other side of the FC…
on the other side of the FC…