Ok update time…
So I flashed the FC with BF4.0 #1238
And tried 7x4x3, 6x4x3 HQ Props and Emax AVAN 6x3.8x2 (bi blades)
The vibrations were still there 
really really bad with the EMAX AVAN props.
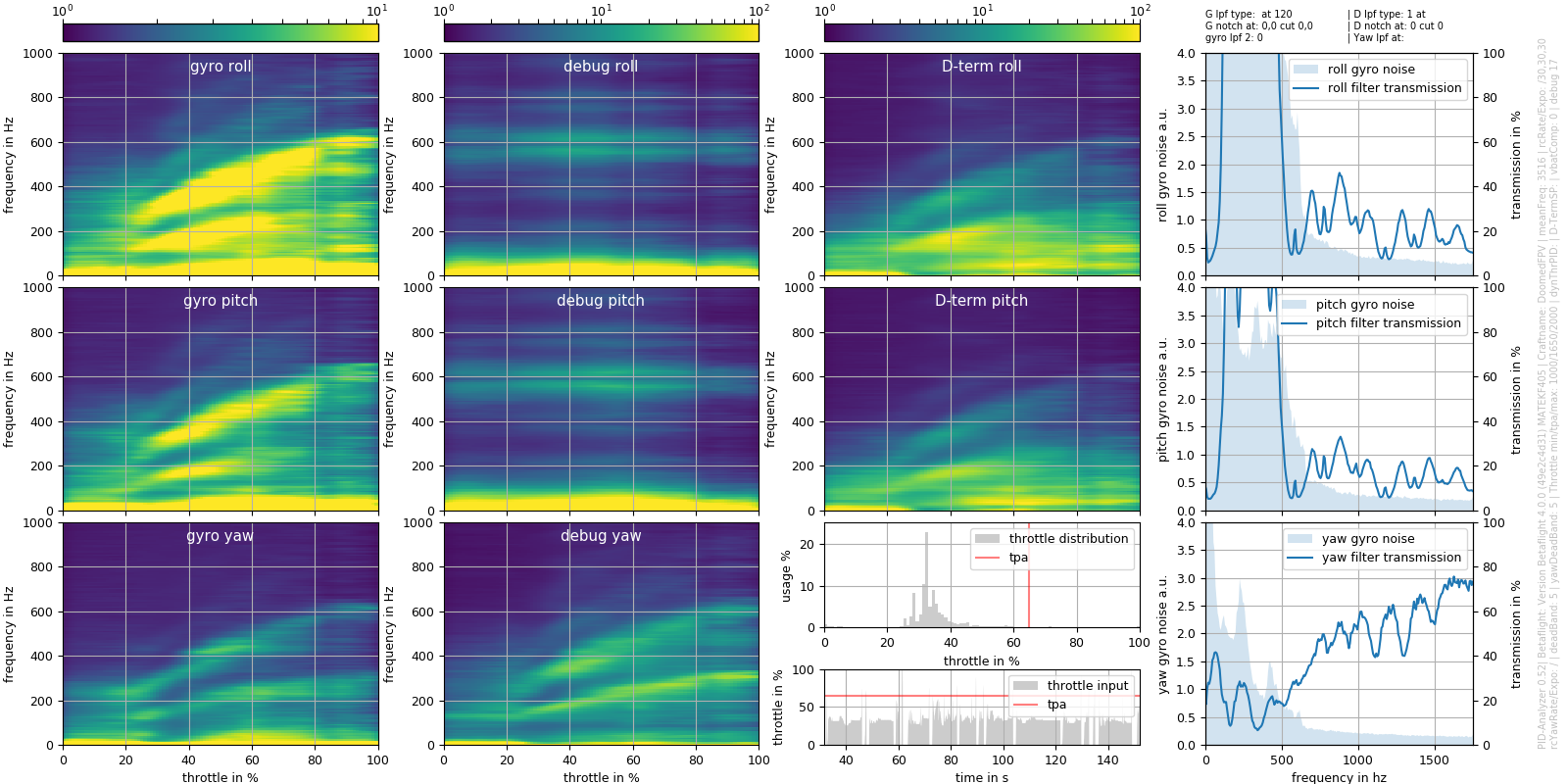
So I turned to Blackbox and Plasmatree for help ( thank god for blackbox logging onto a SD Card )
Now I’m no blackbox or plasmatree expert but even I know what I was looking at was bad…
Yellow = noise not getting filtered… lots of yellow = LOTS of noise.
So I posted it on Facebook for help and I was told…
taken from FB (Group Name - Betaflight BlackBox Log Review)
there is obviously two separate throttle dependent noise bands, a lower ranging from ~160Hz - ~300hz (though falls off @ 60% throttle), and a second higher ranging from ~300Hz to ~600Hz. Dyn notch is on as well as both lowpass and dterm lowpass filters, so honestly at this point I’d start looking for any mechanical issues and ways to reduce noise/vibes onto your gyro, paying close attention to whether something is touching your FC and whether it’s nicely floating on soft mounts, and then checking for rough motors, and/or bad props.
So…
I took a good look at everything on the frame and noticed that even though the FC could move on the soft mounts… I loosened them more, much more.
And long behold…
It was much much better 100% better…
I would share some HD footage but my SD card decided it was going to take a dump.
My Blackbox and Plasmatree data still looks bad ( too me ) but it looked some much better in the FPV feed…
Weather permitting tomorrow…
I’ll go up again and get some HD footage.
2 Likes
Yeah it’s quite an easy thing to overlook, but glad you figured it out 
@DoomedFPV - thanks for posting. You’ve given me inspiration to do a long range build. I’ll be using iNav on a ChameleonTi 6" frame.
1 Like
What sort of flight time were you getting and what batteries are you running.
I just tested a 6” dingo on the avan 6”long range props with 4s 1500mah and was getting flight times of 10mins landing at 3.5v/cell
I’m currently running
HQ 7x3.5x3 inch tri blades with 4S 1800mah lipo
I’ve had 8-9 minutes with light freestyle.
I was getting a lot of vibrations from the avan’s
When you say lifted the pad, what does that mean? Do they pop off if overheated?
If you leave too much heat on the pad for too long… it lifts off and can ruin the board.
Sometimes you can remap the pad somewhere else but that all depends on which pad you killed
1 Like
update time again…
Still working on this project.
So I sacked off the Emax Lite Spec LS2207 1900kv and swapped to TheFPV - The Motor. 2208 1650kv
But I was still getting wobbles, theres nothing wrong with either of the motors they just don’t have the grunt to move 7inch props.
So I’ve gone bigger 2510 1450kv motors, these things are massive.
I’ll report back after I’ve tested them 
You’re doing better than me. I keep having electrical problems with the Flycolor Cross 35A ESC’s. Think cut out if you gently tap the ground, or perform a manoeuvre. Traced that back to not having ground lead back to FC.
When it was flying (I’m using iNav) - the default rates are Sssssssslllllllllllooooooooooowwww!
Also being a 6" with a lot of extra gear on it, it’s heavy. May have to look at significantly reducing the weight if I want to get long range. However when I do, the TrueD 2.4Ghz video system seems to work a treat.
Ok… were getting closer.
I found my 3D prints to be too soft any they where wobbling and adding to the vibrations.
I’ve updated to betaflight 4.0.5 and running the community config for 7inch builds.
Also my RunCam split 2 isn’t soft mounted in anyway… its hot glued in as it kept moving.
So its picking up on every little wobble.
If I mount a RunCam 5 in a TPU mount… It may go a long way to hide the wobbles.
Here is a unlisted 60 second flight showing progress.
ok… I think I have finally cracked it…
the LR build is now flying 99.9% smooth  its taken a long time and lots of work, but i think its there now.
its taken a long time and lots of work, but i think its there now.
After new FC,s, Frames, Motors and loads of different versions of BF and BLHeli and filters and tuning… This is what I’ve got…
I’ll post a updated parts list soon.
1 Like
Nice… i couldn’t see any osculations at all…pretty cool… been a long time in the works but nice to see you got it working perfect at last! Just dont crash now  Also let us know if you did anything fancy with tuning/ filtering.
Also let us know if you did anything fancy with tuning/ filtering.
So below is a upto date parts list, a CLI dump, and screenshots of my PIDs and Filters ( not finished yet… but close enough for now)
Frame: iFlight Lowrider V3 Frame (XL7)
FC: Matek F405-CTR AIO Flight Controller
ESC: Wraith32 v2
Motors: AlmondRacing AR2510 - 1450KV)
Props: HQ 6x4x3
FPV/HD: RunCam Split Mini 2
VTX: TBS Unify Pro 5G8
RX: TBS Crossfire Nano RX (SE)
Ill post the CLI and screen grabs tomorrow…its 2am now going to get some sleep…
Still a working progress but I feel its a good start, and I can stop worrying so much about the tune and just fly and enjoy the views…
CLI Dump BF4.1.0
diff all
version
Betaflight / MATEKF405 (MKF4) 4.1.0 Oct 16 2019 / 11:42:57 (c37a7c91a) MSP API: 1.42
start the command batch
batch start
reset configuration to default settings
defaults nosave
board_name MATEKF405
mcu_id 002b00223436470c37333638
signature
name: DoomedFPV
resources
resource MOTOR 5 NONE
resource SERIAL_TX 11 A15
feature
feature GPS
beeper
beeper -GYRO_CALIBRATED
beeper -RX_LOST_LANDING
beeper -DISARMING
beeper -ARMING
beeper -ARMING_GPS_FIX
beeper -BAT_CRIT_LOW
beeper -BAT_LOW
beeper -GPS_STATUS
beeper -ACC_CALIBRATION
beeper -ACC_CALIBRATION_FAIL
beeper -READY_BEEP
beeper -DISARM_REPEAT
beeper -ARMED
beeper -SYSTEM_INIT
beeper -ON_USB
beeper -BLACKBOX_ERASE
beeper -CRASH_FLIP
beeper -CAM_CONNECTION_OPEN
beeper -CAM_CONNECTION_CLOSE
beeper -RC_SMOOTHING_INIT_FAIL
serial
serial 0 64 115200 57600 0 115200
serial 1 0 115200 57600 0 115200
serial 2 16384 115200 57600 0 115200
serial 3 2 115200 9600 0 115200
serial 4 1024 115200 57600 0 115200
serial 30 2048 115200 57600 0 115200
aux
aux 0 0 1 1700 2100 0 0
aux 1 13 0 1300 2100 0 0
aux 2 26 4 1300 1700 0 0
aux 3 33 3 1300 1700 0 0
aux 4 35 0 1700 2100 0 0
vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 0 1 2 3
vtxtable powerlabels 25 200 500 800
master
set gyro_sync_denom = 2
set dyn_notch_range = LOW
set dyn_notch_width_percent = 0
set dyn_notch_q = 200
set dyn_notch_min_hz = 90
set acc_hardware = NONE
set mag_hardware = NONE
set min_check = 1010
set max_check = 2000
set rssi_channel = 12
set fpv_mix_degrees = 25
set serialrx_provider = CRSF
set blackbox_p_ratio = 64
set dshot_idle_value = 2
set dshot_bidir = ON
set use_unsynced_pwm = OFF
set motor_pwm_protocol = DSHOT300
set failsafe_delay = 2
set failsafe_throttle_low_delay = 50
set bat_capacity = 1800
set yaw_motors_reversed = ON
set small_angle = 180
set gps_auto_baud = ON
set deadband = 2
set yaw_deadband = 2
set pid_process_denom = 1
set tlm_inverted = ON
set osd_units = IMPERIAL
set osd_warn_core_temp = OFF
set osd_cap_alarm = 1800
set osd_vbat_pos = 2369
set osd_rssi_pos = 2105
set osd_tim_1_pos = 54
set osd_tim_2_pos = 2134
set osd_flymode_pos = 333
set osd_throttle_pos = 225
set osd_vtx_channel_pos = 303
set osd_ah_pos = 110
set osd_current_pos = 2433
set osd_mah_drawn_pos = 2465
set osd_craft_name_pos = 2122
set osd_gps_speed_pos = 2424
set osd_gps_lon_pos = 2497
set osd_gps_lat_pos = 2513
set osd_gps_sats_pos = 2489
set osd_home_dir_pos = 2095
set osd_home_dist_pos = 2090
set osd_compass_bar_pos = 266
set osd_altitude_pos = 2454
set osd_pid_roll_pos = 423
set osd_pid_pitch_pos = 455
set osd_pid_yaw_pos = 487
set osd_debug_pos = 1
set osd_power_pos = 321
set osd_pidrate_profile_pos = 345
set osd_warnings_pos = 2313
set osd_avg_cell_voltage_pos = 2401
set osd_pit_ang_pos = 257
set osd_rol_ang_pos = 289
set osd_battery_usage_pos = 392
set osd_disarmed_pos = 2283
set osd_nheading_pos = 311
set osd_nvario_pos = 279
set osd_esc_tmp_pos = 82
set osd_esc_rpm_pos = 83
set debug_mode = GYRO_SCALED
set vtx_band = 5
set vtx_channel = 1
set vtx_power = 2
set vtx_freq = 5658
set gyro_rpm_notch_harmonics = 1
set name = DoomedFPV
profile 0
profile 0
set p_pitch = 65
set i_pitch = 85
set d_pitch = 39
set f_pitch = 124
set p_roll = 55
set i_roll = 83
set d_roll = 36
set f_roll = 117
set p_yaw = 39
set i_yaw = 45
set f_yaw = 117
set d_min_roll = 16
set d_min_pitch = 19
set idle_min_rpm = 15
profile 1
profile 2
restore original profile selection
profile 0
rateprofile 0
rateprofile 0
set roll_rc_rate = 140
set pitch_rc_rate = 140
set yaw_rc_rate = 140
set roll_expo = 30
set pitch_expo = 30
set yaw_expo = 30
set roll_srate = 71
set pitch_srate = 71
set yaw_srate = 71
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
restore original rateprofile selection
rateprofile 0
save configuration
save
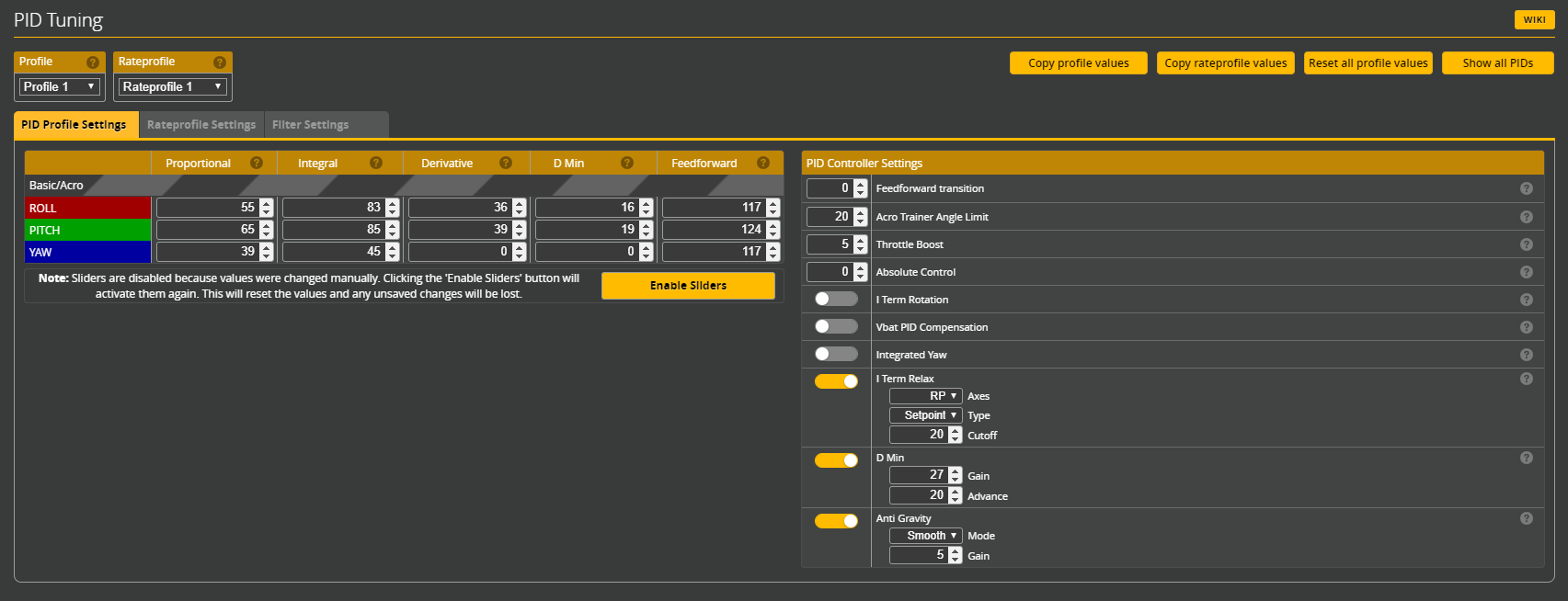
PID Tuning Tab - PID Profile Settings
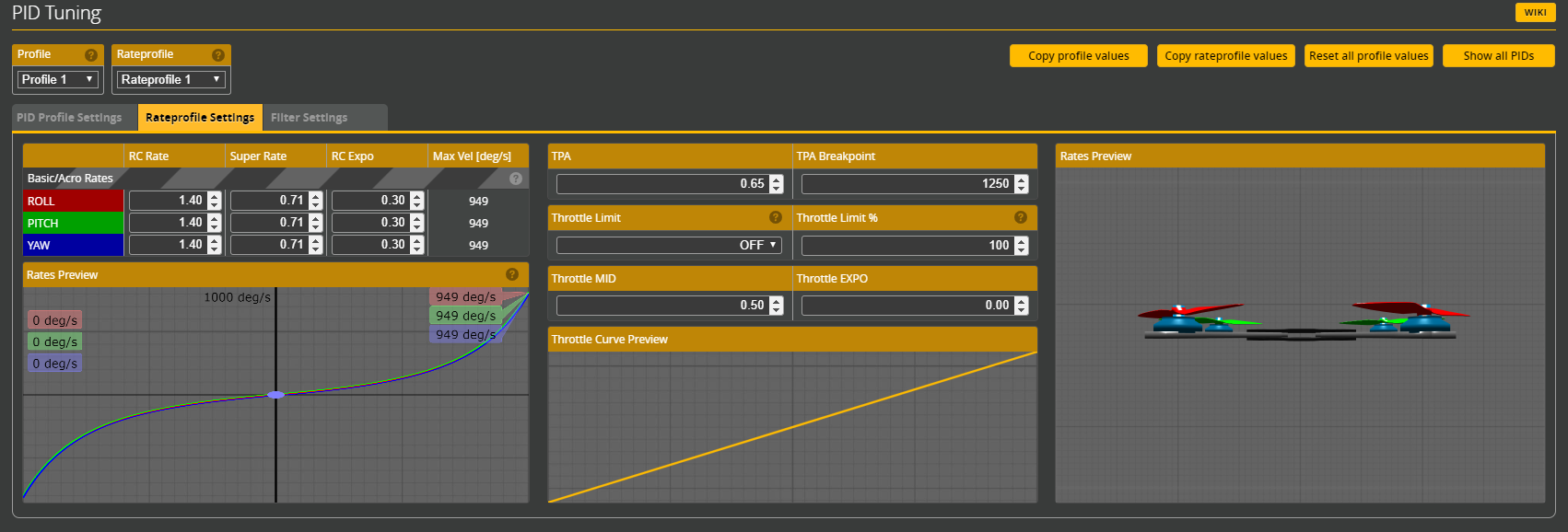
PID Tuning Tab - Rateprofile Settings
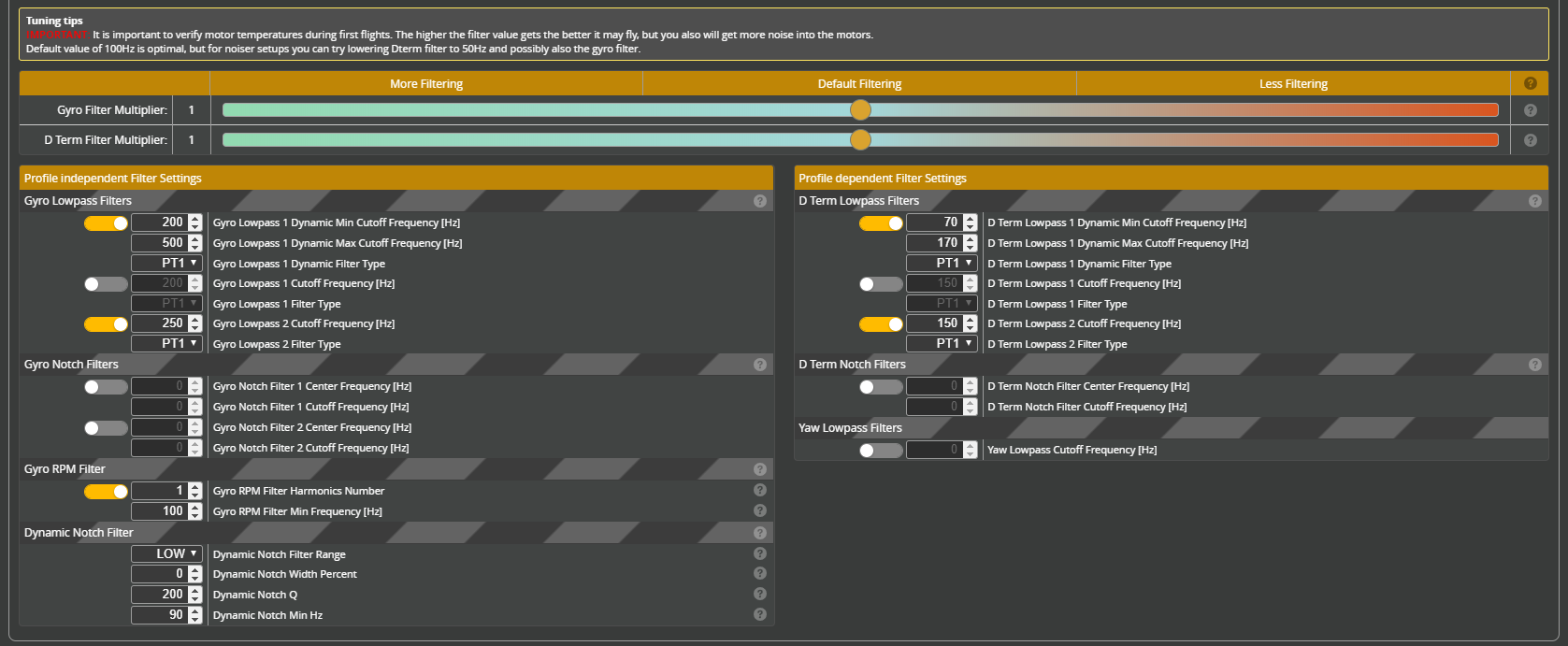
PID Tuning - Filter Settings
I so may go Betaflight on mine. I’ve got everything working in iNav but it’s a bitch to tune compared with Betaflight. Still haven’t programmed half the controls on it. 2.4Ghz video working well. If I get chance this Sunday, I’ll post some footage.
I look forward to seeing it