I’ve decided to build a GoPro/Photography drone as the ZMR250 was a little skittish and flight time didn’t last long.
For this build i have decided to use a large frame, and 10" props.
The Build consists of the following:
FC - OpenPilot Revolution
Motor - Racerstar 2216 810kv Brushless Motors
ESC - Racerstar Tattoo 30A BLheli_32 ESC’s
Frame - Diatone F450 Quad V3 (with reinforced motor mount-arm)
PDB - RealAcc RPDB (5v/9v/12v BEC) 4x50A max
Batt - Turnigy 5000mAh 4S 25C Lipo (125A Constant)
RX - Flysky X6B with batt telem
GPS - Ublox 7M GPS (inc mag)
Props - GemFan 1038 Carbon Nylon
Power - XT90 Connector
Working on the basis that the total weight including the battery will be around 1016g (not including gopro), I chose the Motors and Props based on providing 832g thrust each motor. This should give a total lifting capacity of 3.3kg at full throttle. Based on calculations, i should only need around 31% throttle to take-off/hover, leaving plenty left to add a camera. Flight time should be roughly 20 mins, or 15 mins using the 80% rule.
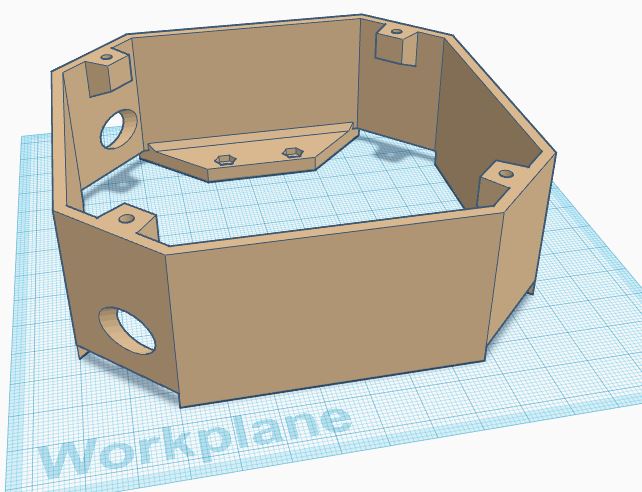
Since purchasing a 3d Printer, I have printed some custom parts to enhance the build. I have printed a Dome cover to house the FC and PDB inside, which allows the GPS to mount on top, and the OpLink antenna. However, i will be changing this enclosure for a different one as it’s a little tightly packed inside. I have also printed some extended landing feet, as well as some frame spacers to allow the 5000mAh 4S battery to slide in between the frame plates. Battery stoppers have also been printed to keep the lipo in place during flight.
I had a small catastrophe when i connected up the battery for the first time only to find 2 ESC’s wired up incorrect polarity, which made them pop and the lipo almost go nuclear (used a 3s 1500mah for the test). I blame the lack of sleep on this (8 month old infant currently teething) as i had failed to notice the solder pads on the PDB are mirror opposite on the other side of the board. I ordered 4 new ESC’s and a new PDB as i didn’t want to risk the chance of a second failure if the old PDB somehow went tits up with the popped ESC’s.
All wiring soldered and triple checked this time, all ok, FC powers on, ESC’s and Motors work fine.
I have been making sure that everything is ready for it’s maiden flight (such as extended landing feet, and green/red arm led’s).
To-Do:
Print new top-cover/housing - DONE
Using LibrePilot GCS 16.09 R711 for FC programming
FC will be configured for GPS flight modes
RTH+AutoLand set as Failsafe
Test Failsafe
Test Flight
Print GoPro Mount and test
Program for External Arming WS2811 LED
Program for External Buzzer assigned to TX accessory switch (to be used as lost model beeper)



This is the dome cover
 !
!
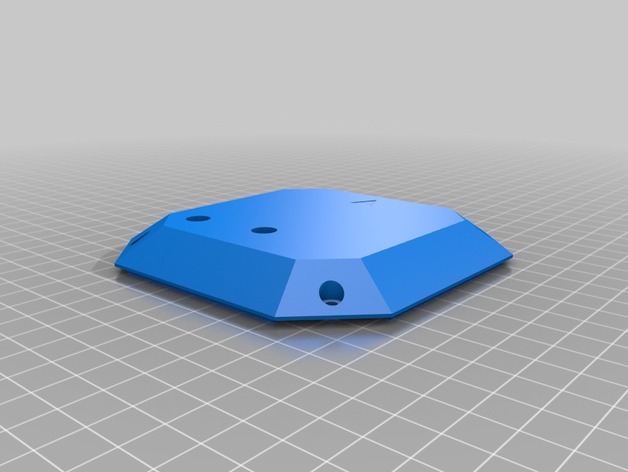
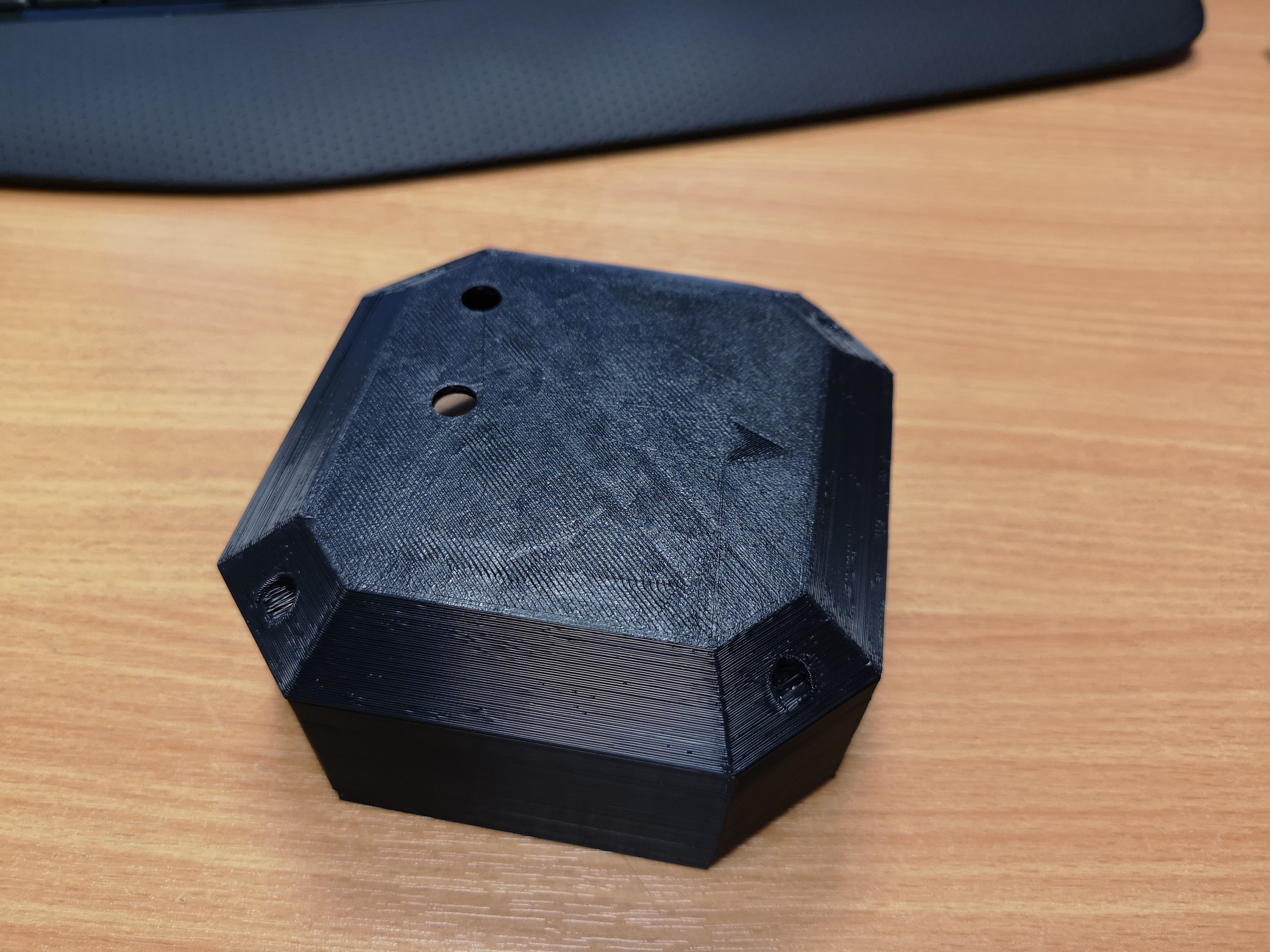
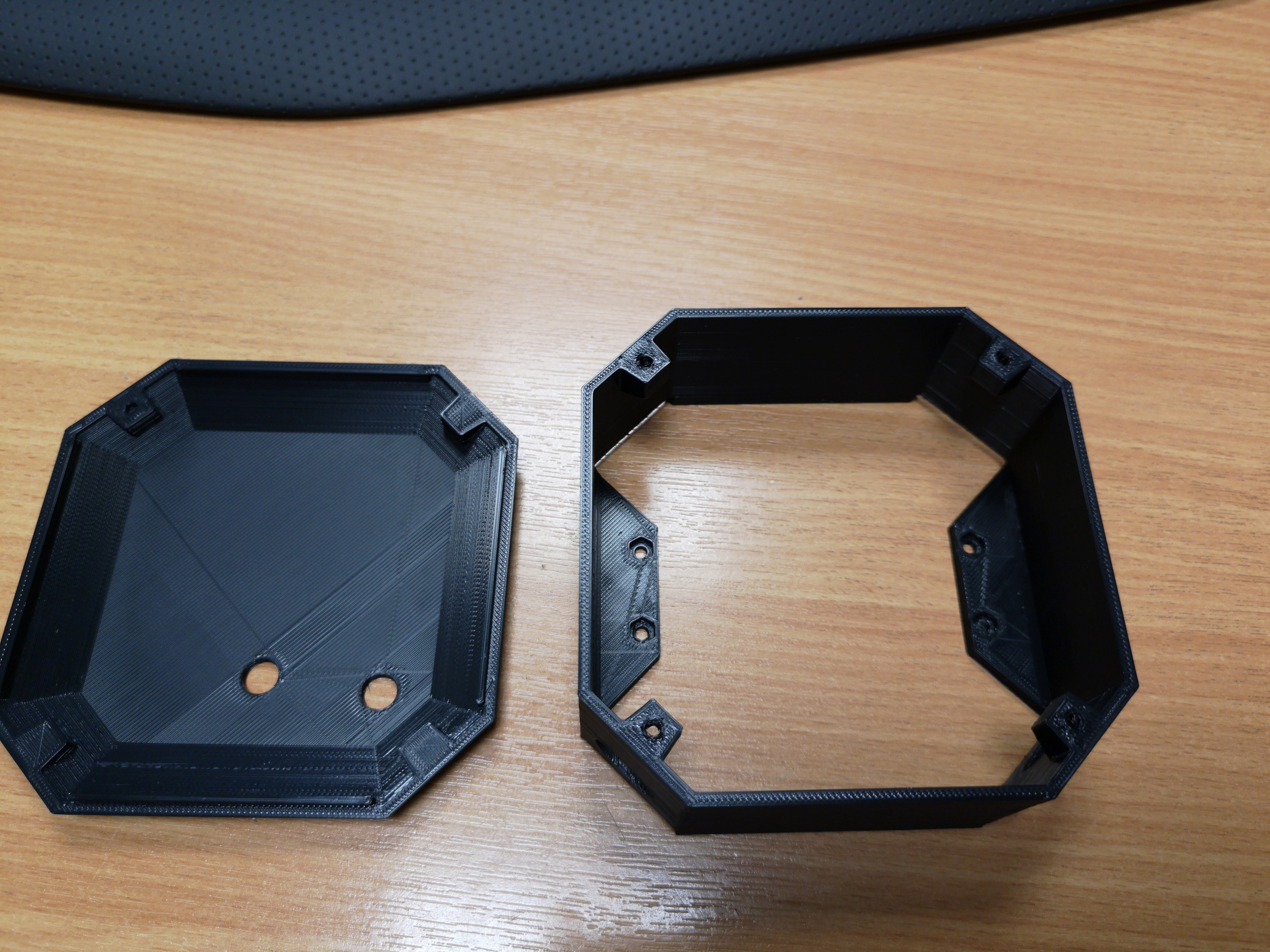
This is what it will be changed to. I have remixed a part from Thingiverse to close the hole that was made for an FPV camera as i won’t be using one currently.