Think I made a boo boo…
So the other day I killed my new Airbot Fireworks v2 FC by lifting the OSD pad.
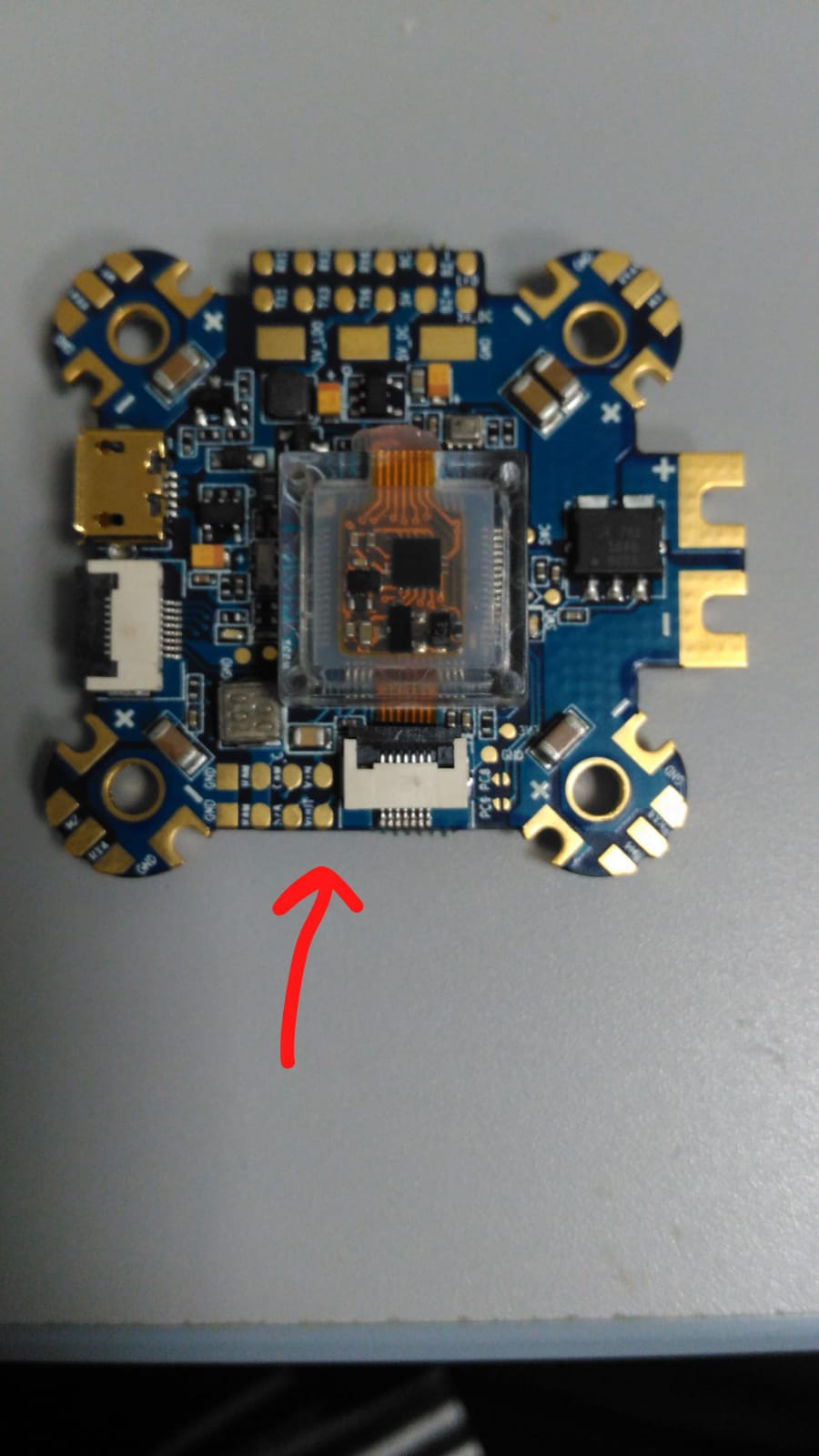
This is the pad I lifted and killed…
So I ordered a new FC from unmannedtech which arrived today… thanks alex @unmannedtech
I had a look at the new shinny FC and noticed  on the other side of the FC…
on the other side of the FC…
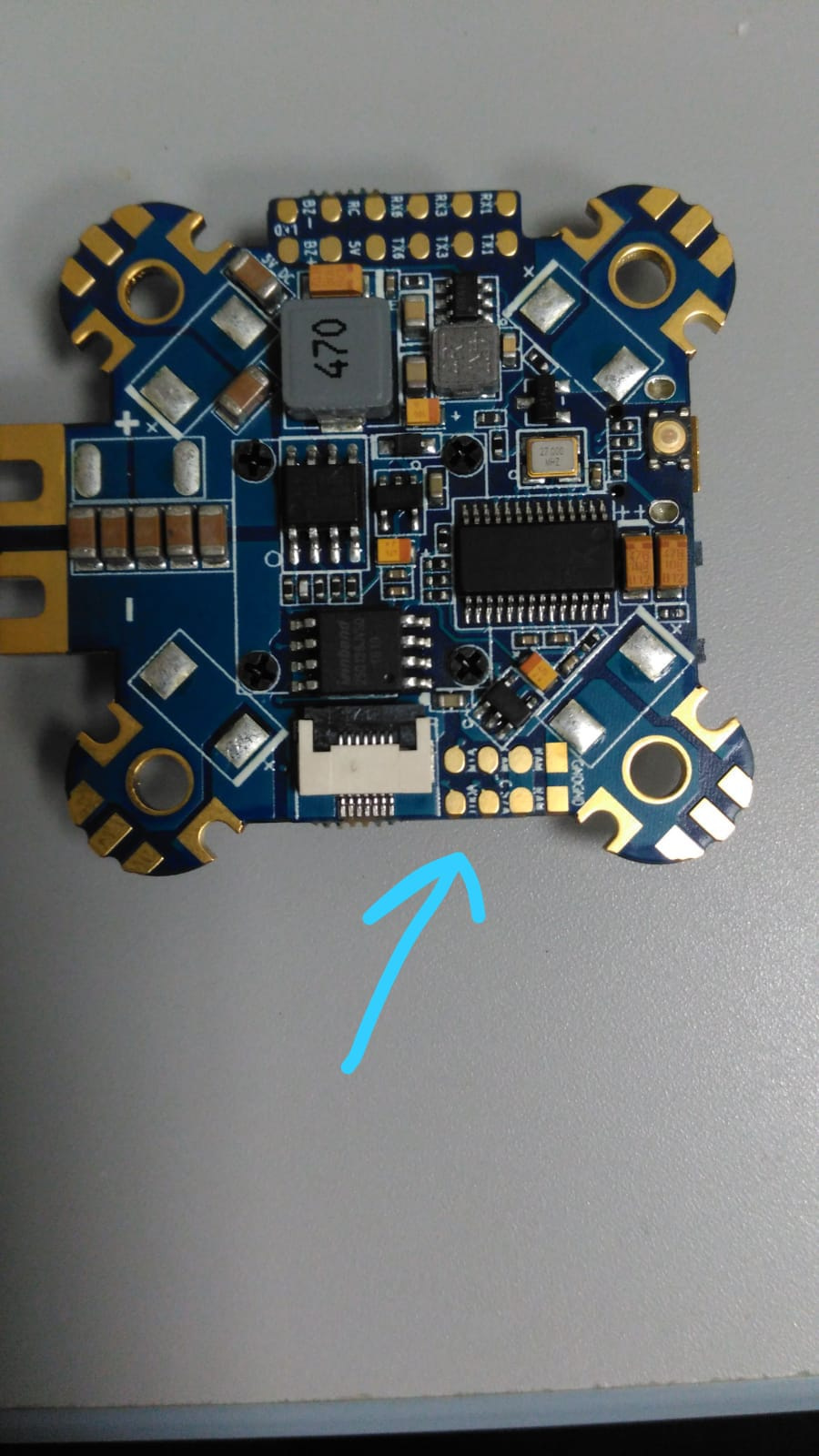
Is a repeat of all the solder pads on the top of the board… including the OSD video out pad.
So I don’t think I needed a new FC.
My job now is to lift all the hardware off the frame and solder onto the OSD pad on the under side of the FC.
Its a bit of a hassle but easier than soldering in a whole new FC.
On a plus note… I have a spare FC. 