Hi guys I’m a newbie as you can tell from the question itself . I have an APM arducopter that i could never get to work , and the pixhawk board i bought to replace it was faulty. I am just finishing a racing copter with an F7 board, and want to go down that root. I have 6 DYS programmable esc’s and want to use the existing batteries which are 14.8 volt . Can I , and do I need to have a voltage reducer? Also what about the three wires coming from the esc’s. How would I configure them ??
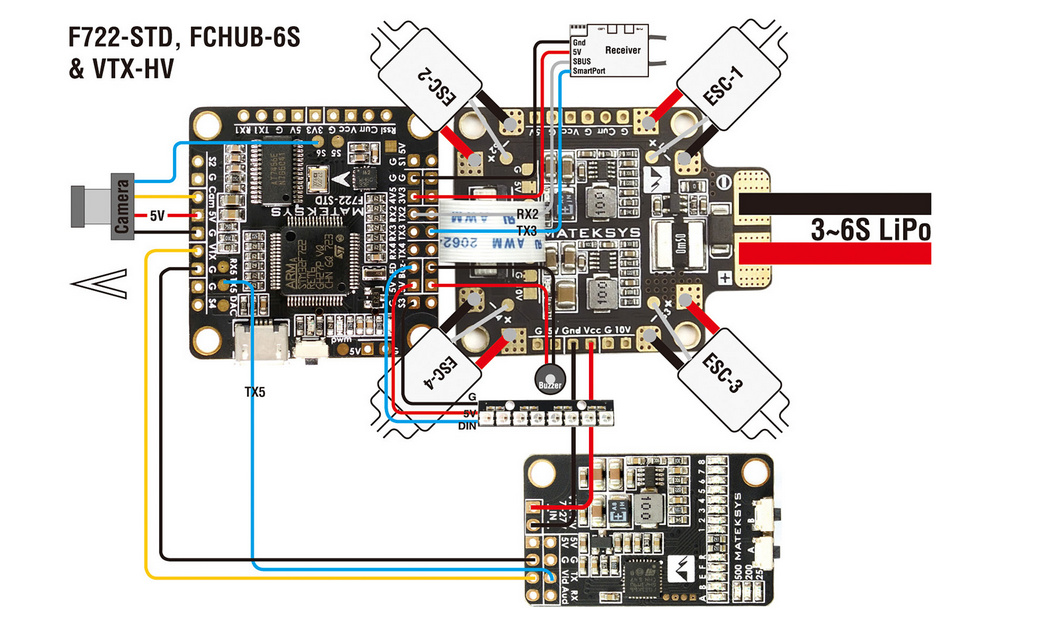
You need to power the matek F7 with a 5V power source. Most of Matek flight controllers are desgiend to be used with one of their power distribution boards.
If you want to use the Matek F7 with your 14V battery, you will need ot connect it to the FCHUB-6S:
Also while I’m at it . can i reduce the output on a Taranus q7 s ??? Its frying my brain , and would rather like to weaken the signal whilst setting up especially when indoors and around kids.
I’ve had a quick google and these are old SimonK ESC’s they say “updated fireware for multicopter”
My first set of ESC’s where SimonK. They ended up in the bin.
What you need is some BLheli ESCs I can recommanded these: Chaos BLHeli_S Dshot ESC 30A
I have them on both of my quads
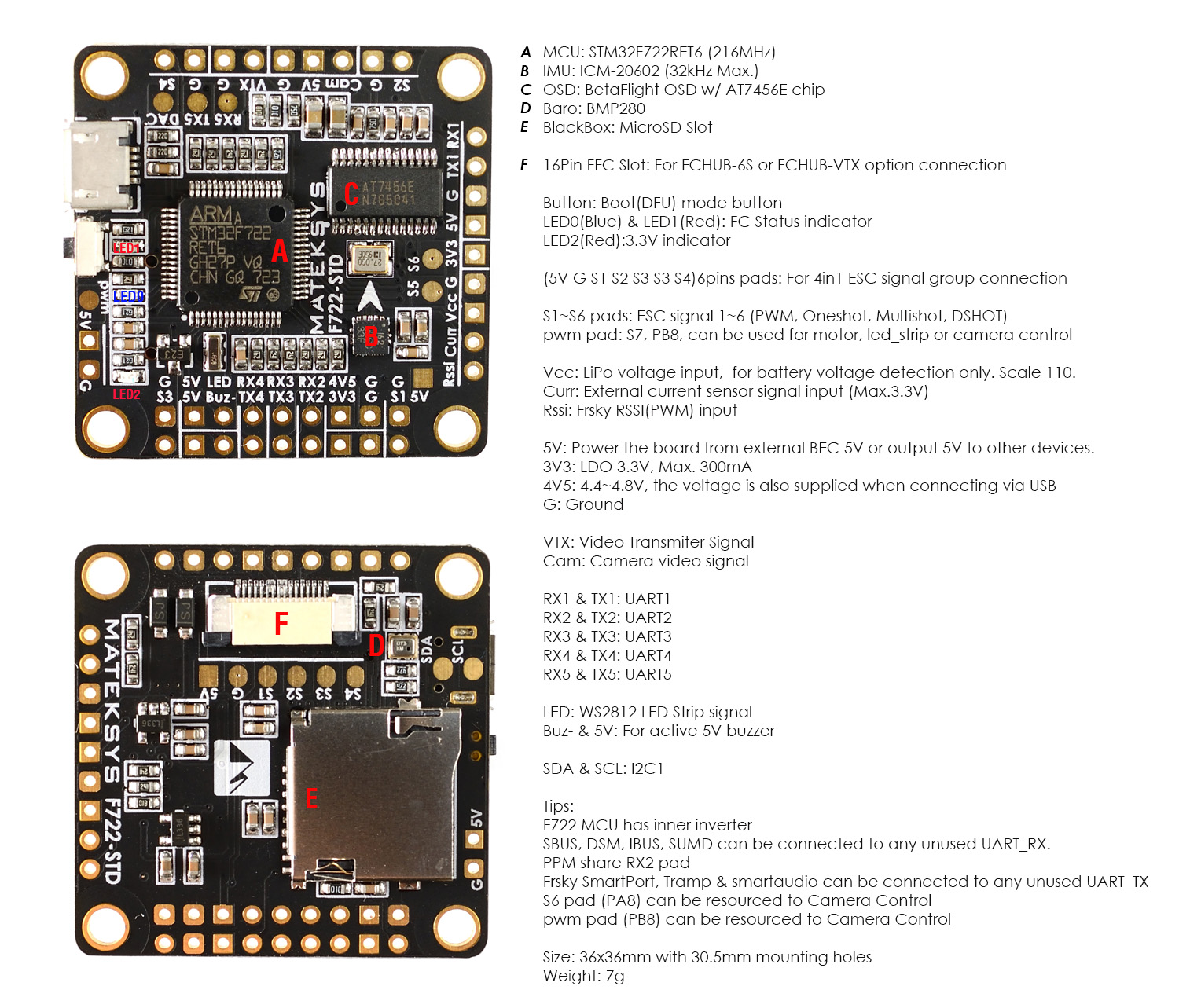
For connecting GPS, you need to connect the compass to the SDA and SCL pins on the bottom of the Marek f722. For the gps you just need to hook it up to one of the unused UART ports. Diagram below helps you identify the correct pins on the flight controller
The two things that catch most people out is that depending on how your GPS module is labelled, you usually need to connect tx from GPS to Rx on FC, but if that doesn’t work, try connecting tx to tx.
Lastly you may need to adjust the baud rate on your GPS module if swapping the cables doesn’t work. Busy most ublox modules have the correct baud rate set out of the box.
Thanks for all that . This was going to be a hexacopter by the way, but not sure whether i can use this FC, as its just a 4 only . I have a Matek PBD for a 6 , but its not a flight controller is it ?
All gets a bit confusing for a newbie. Should i just stick with a Pixhawk or an APM, or is there a Matek configuration or an Omnibus configuration I can go with ??
Yeah if you are looking for GPS based navigation, RTH and position hold, a pixhawk based board is 100x better than iNav at the moment. iNav is making good progress but it is still in its early days whereas the pixhawk (ardupilot project) has over 6 years of experience compared to iNav. The main issue with pixhawk is the boards are abit more expensive
I obviously got a cheap copy then . For some reason Sbus in doesn’t work with a turnigy rx. Everything going pair shaped at the moment . Have an APM that supposedly is meant to be able to connect to PPM , but nothing. Perhaps i will just need to splash out on the real deal .
Yeah buying direct from China is sometimes hit and miss… you sometimes you get a genuinely great deal… but other times if you do get a clone and then support is non existent.
Well ive decided to go quad copter and was going to get the s500 frame off you until i noticed you we’re out of it . I like the Matek format and so I’m going to put the one I got off you on that.
I’m going to go simple . Going to piggy back a foxeer camera on the gimbal I have for a go pro, so that as it moves I have an FPV view of the field and what I’m recording with the go pro or whatever.
Seriously , in reality who needs half the gadgetry ??? its just the geek in us . As i’m totally limited in my knowledge I’m just going to use common sense and simplicity to my advantage .
However I have just got to have the lifting landing gear … its just too awesome and cool ‘not’ to have .
As for TX sadly i have had to return that very awesome Q7S to you . I’ve got to be able to alter the wifi output . I’m going to go for the Jumper plus so that I can bind pretty well all my toys with a oner.
if you guys at unmanned can get me one I’m more than happy to buy off you by the way
We are getting the new jumper plus radio but I don’t have an exact date as to when we will get them, but it will likely still be another 3 weeks due to slow shipping, so if you need a radio in the next week or so probably best to get of someone else who has them.
S500 units are also on the way so we should get them in about a week or so.
For FPV, which GoPro are you using, as some of them support AV output, so if yours does you can just hoot it up directly to a VTX without the need for a separate fpv camera.