I purchased a F4 V6 as opposed to the 5.1 (from unmannedtechshop), which I am familiar with. I cannot get the magnetometer working when testing on both INAV and betaflight. I have spent a lot of time testing this now and I also cannot seem to find much information at all about this board. I tested with 5M ohm pullups as well as reducing frequency on the i2c bus.
The same hardware that I am using works fine on a 5.1 version (using a beitian 880)
Anyone familiar with this issue?
You flashing the right firmware?
The V6 omnibus has quite a few changes:
New firmware target (OMNIBUSF4FW) - after flashing go to CLI and type set gyro_to_use = second , and save to get the IMU working.
Sure, for Betaflight. For INAVm I used Fireworks v2 (IMU working at startup). I2C does not seem to have errors when checking status. I disabled uart 3 and attached i2c to to scl/sda (betaflight). Could it be a board problem, or is it something I have completely missed? Have not been able to find a datasheet for this board.
We are still working on the manual, so it should be done in about a week. But for now I2C is on UART3, but maybe you are mixing up SDA/SCL?
I would also double check that everything is disabled on UART3. (maybe verify this using hte CLI just to make sure the settings are correctly saved on your board?)
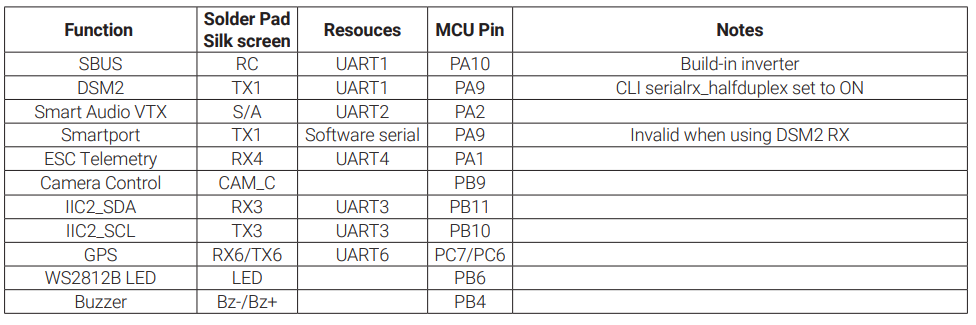
For now here is the resources table for the Omnibus F4 V6
Hi Alex,
Thanks for your reply. Yes I have tested both options. I made sure UART3 is disabled and that the resources (scl sda) are running on b10 and b11 respectively (explicit setting is not needed in INAV).
Regards
I just read your email about this and you said that it’s not working in betaflight either? If so then either something is faulty or there is a hidden setting somewhere. I will talk to the omnibus board designer about this and see if they have a solution…
That is correct. I tested first on betaflight to avoid possible snags etc. According to the pinout there are two outlets for i2c (I tested both). It’s a pity, as this is a nice board. I suspect it is in software. Please also ask for a simplified datasheet from airbot, if possible. thanks again
Looking into this can you check the resource mapping on your FC as maybe the I2C is not mapped correctly.
The SDA needs to be mapped to PB9, and SCL needs to be mapped to PB8. If you are not sure just send me a screenshot after running the resource list command in betaflight and I can check it for you.
Hi
5M pull-ups are to high, virtually ineffective.
Try 10k’s
Hope this helps
Steve 
PS
Remember they pull-up to 3.3v
Not 5v and certainly not BATT 
Hi, thanks for providing the correct mapping. I have created INAV2.0 firmware for the V6 version, see enclosed. That is, if somebody wants to run the board with INAV before an official board is made. This will correct the i2c issue (note that dynamic mapping is not implemented in INAV, so remapping will not work here). I have not tested the board properly yet (it extends from the fireworksv2 board), but the imu including baro/gps will now work.
inav_2.0.0_OMNIBUSF4V6.hex.zip (284.2 KB)
(gps on uart3, mag i2c1, sbus uart6, sport tx1)
thanks steviee10, I meant 5K, not M of course.
regards, Andrew
1 Like
This topic was automatically closed 3 days after the last reply. New replies are no longer allowed.