Recently holybro released there latest FPV flight controller, the Kakute F4. Just about everyone is making their own flight controllers nowadays, but why did I (and why should you) pay any attention to this one? Well I will explain below.
At this point I have not fully tested this FC, so I am taking what holybro are saying at face value, and assuming what they say is true, this is why this FC will be great

What makes the Kakute F4 Special?
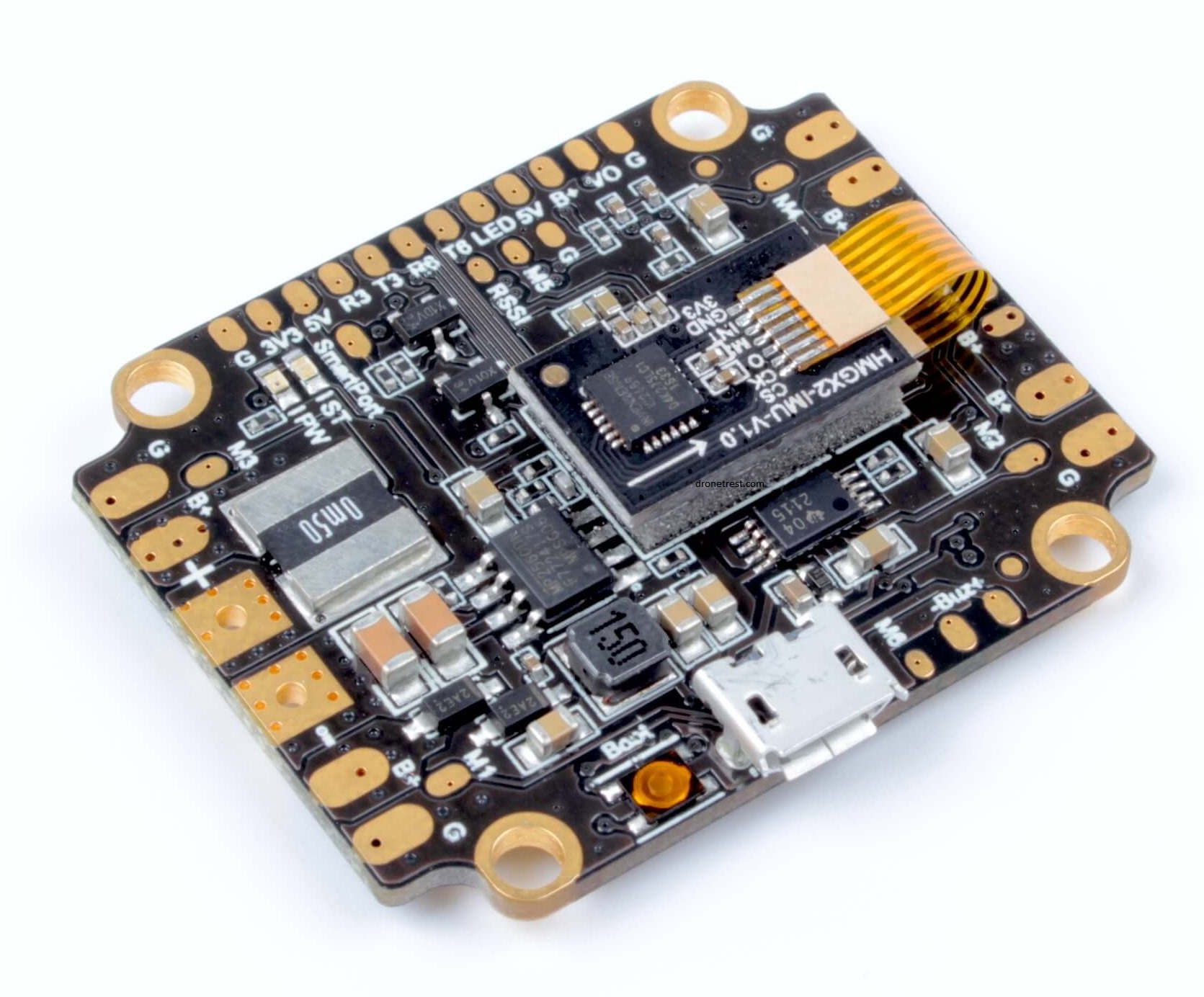
- It has a vibration isolated IMU the ICM20689 connected via SPI which lets you run at a full 32Khz update rate without worrying about vibrations (on paper for now at least)
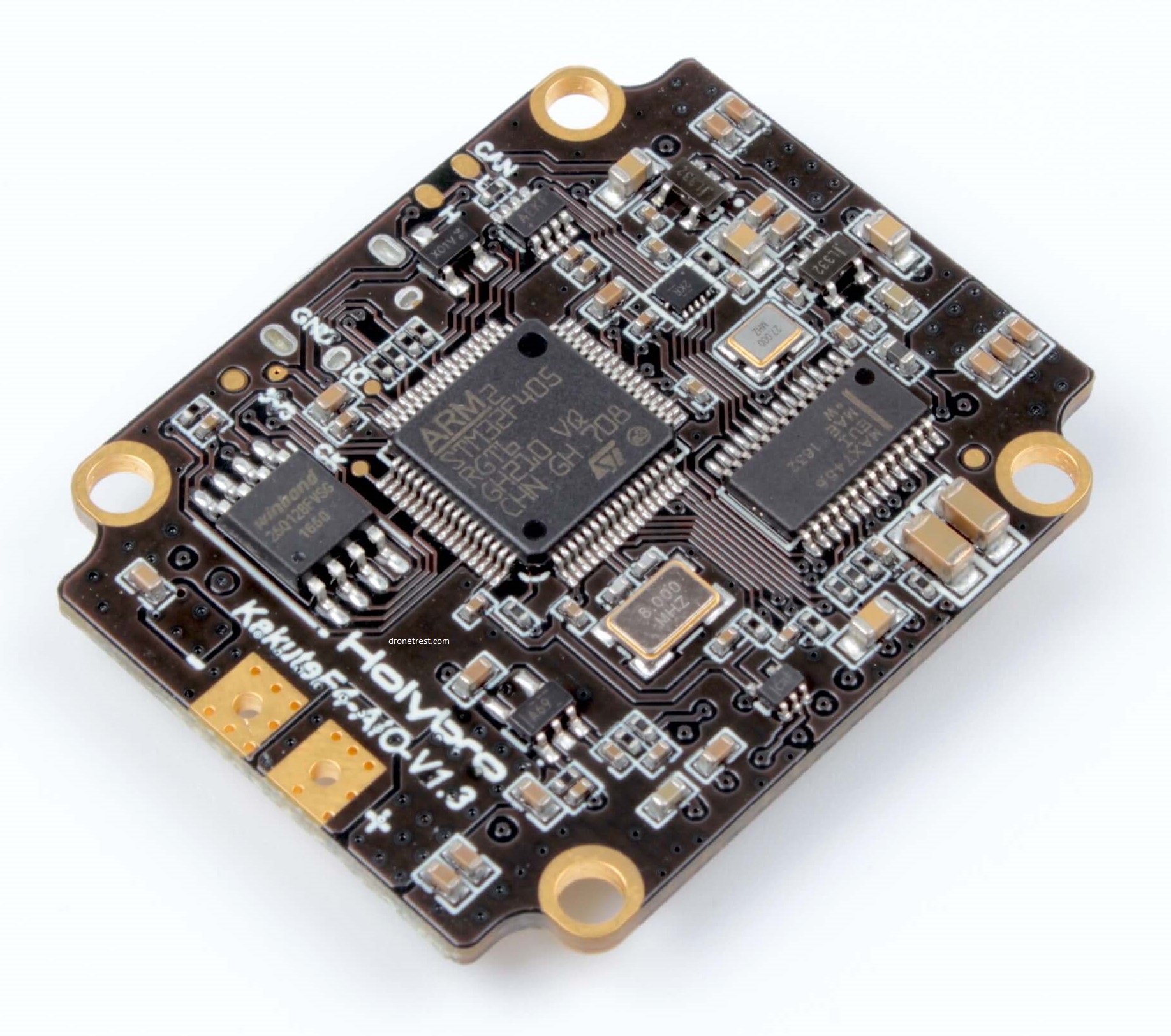
- It checks the boxes of what to look for in a modern FC It has a F4 MCU to cope with a 32Khz PID looptime, it has a betaflight OSD (direct configuration via betaflight GUI), it has built in PDB rated to 120A, It has a 1.2A 5V Bec powerful enough to power your receiver, camera and VTX, and a 12V bec for LED’s
- It has a very well written manual not exactly the firs tthing you look for, but the kakute F4 manual is well written and explains everything clearly.
- It is not overpriced no official word on pricing, but we are looking at about $40, or £35, so for a fully integrated FC with PDB, its not bad at all.
We have a bunch on the way, so once I get my hands on this FC I will do a proper review, but for those who dont want to wait, here is where you can buy it so far
Where to buy
Key Features
- Supports Betaflight and Cleanflight with official target KakuteF4.
- Betaflight OSD. Change PIDs, adjust common configuration parameters, and change video transmitter channel and power level, all using your transmitter sticks and goggles.
- Soft-mounting built in. The IMU (“gyro”) chip on this board is mounted on vibration-isolating foam. This means that there is no need to soft-mount the board itself.
- New high-performance / low-noise / high sensitivity IMU. ICM20689 with 6-axis gyro and accelerometer. Can run at up to 32 kHz.
- 2 oz. copper PCB allows up to 120A maximum continuous current.
- Dedicated bootloader button for easy firmware flashing.
- Low-profile design fits into even very compact frames.
- Input voltage 7v to 42v. Power the board directly from the flight pack, up to 6S (on “BAT” pad only).
- Automatic voltage monitoring. No need to run a separate vBat wire for voltage monitoring; the Kakute F4 AIO monitors voltage directly from the battery power lead.
- Filtered voltage output for clean, noise-free video. On-board regulators output 5v at up to 1.5 amps and 3.3v at up to 200 mA to power peripherals such as receiver, video transmitter, FPV camera, or LED strip.
- Supports BLHeli pass-through for easy ESC upgrade and configuration.
Specifications:
- MCU: STM32F405RGT6 32-bit processor
- IMU: ICM20689 (SPI)
- USB VCP Driver (all UARTs usable simultaneously; USB does not take up a UART)
- 3 hardware UARTS (UART1,3,6)
- 128 Mbit Dataflash chip for Blackbox logging
- Dimensions: 35x43x7mm (includes USB in height)
- Mounting Holes: Standard 30.5mm square to center of holes
- Weight: 7g