Hi,
First thing…
1, make sure props are NOT fitted
2, the APM controller should NOT have USB cable connected
3, LiPo battery is NOT connected
Turn on your transmitter and put the throttle stick at maximum.(if stick is sprung to centre then find a way to hold it in maximum position.
Connect the LiPo battery. The APM’s red, blue and yellow LEDs should light up in a cyclical pattern. (this means the it’s ready to go into ESC calibration mode the next time you plug it in)
With the transmitter throttle stick still held high, unplug the battery, wait a few seconds then reconnect it
The APM is now in ESC calibration mode. (the red and blue LEDs should be blinking alternatively on and off)
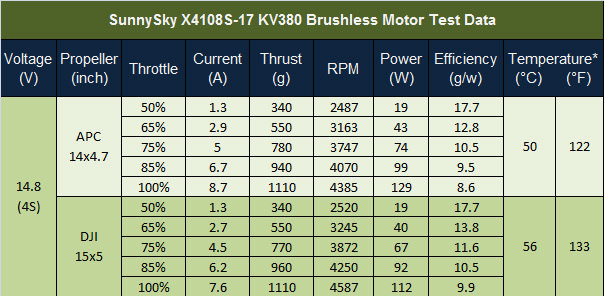
Wait for your ESCs to emit the tones, the regular number of beeps indicating your battery’s cell count, one for each cell (i.e. 3 for 3S, 4 for 4S) and then an additional two beeps to indicate that the maximum throttle stick position has been recorded.
move the transmitter’s throttle stick down to its minimum position and keep it there.
The ESC’s should then give a long tone meaning that the minimum throttle position has been recorded
The calibration should now be complete.
If the long tone indicating successful calibration was heard, the motors are “live” now and if you raise the throttle a bit they should spin. Test that the motors spin by raising the throttle a bit and then lowering it again.
Set the throttle to minimum and disconnect the battery, this exits calibration mode.
In my experience I find it best to power up with the throttle at minimum position but this may just be something I have OCD about.
Thanks to ardupilot documentation for this method
see also
https://www.youtube.com/watch?v=gYoknRObfOg
Let us know how you get on, we want to see a video it flying
Cheers
Steve 
PS I’ll look at your parameters file later tonight


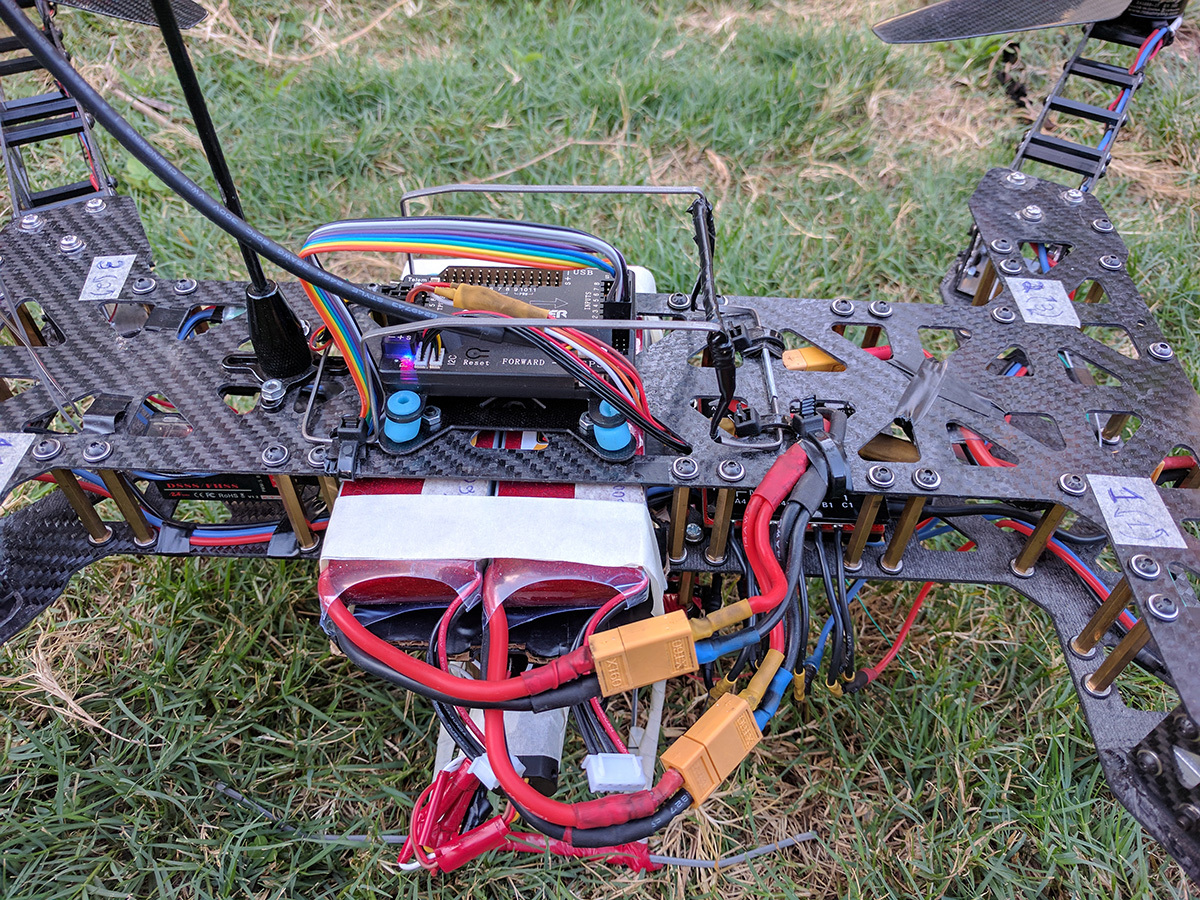






 I will try and reconnect it to the GND port on the APM board then redo my tests.
I will try and reconnect it to the GND port on the APM board then redo my tests. there must be some sort of issue with power delivery from any batteries less than 6S.
there must be some sort of issue with power delivery from any batteries less than 6S.