Morning all,
I am having issues with my Arducopter. One of those issues is that if I bring the quad down, when I increase the throttle again, sometimes to max, it is very slow to lift, and sometimes bounces off the ground. I have changed the setting in Mission Planner to allow for more aggressive rates of climb, but that hasn’t helped at all - in fact it felt worse. I have read that throttle PIDs rarely need adjusting, so I am at a bit of a loss. I am using a 5000 mAh 3s lipo.
I should add that running auto review of any logs shows thrust fail - something along the lines of the average climb rate being too low for the average throttle input. The input and output seem to follow each other nicely when I look at the logs.
The other issue is Alt Hold (and therefore land). When I put it into either of these modes, the quad starts climbing. Its isn’t a particularly fast climb - although the quad won’t climb fast anyway. I have mounted the APM on some anti vibration foam, but I haven’t been able to get the vibration analysis done yet - is there anything else that could cause this apart from vibration?
Thanks in advance,
Luke.
Sorry about the delays in getting back to you about this, could you provide me with the log files so I can have a look, and also provide me with details on your arducopter, what motors are you using, and what is the total weight? As it could just be that its to heavily loaded to fly properly.
As for the alt hole mode with the quadcopter climbing, when you are in this mode was your throttle stick on your transmitter in the midpoint? As arducopter still allows the pilot to control the altitude in this mode by using the throttle stick.
I will get some log files to you over the weekend. Where should I send them to? The quad is the 3dr frame sold by yourselves, with the 2212q motor, esc, and prop kit also from you. Then all I have is the APM, gps, and receiver module. Thats it. I make the total weight around 1.7kg.
As for the alt hold, it still climbs in alt hold with the throttle in the mid position.
You should be able to add them as a zip file directly here, if not let me know and I will change the settings
Thrust Fail#.zip (301.6 KB)
Hopefully this works. The APM/Mission Planner update has changed the way logs work and has confused me a bit
Firstly I am very sorry for taking such a long time to reply, I am looking into the log files now and will get back to you shortly.
During the setup have you completed an ESC and radio calibration?
Hi
I have had a quick look at your logs and they show that your hover throttle value is much higher than usual, which would explain the issues you describe. The cause of this could be due to a couple issues:
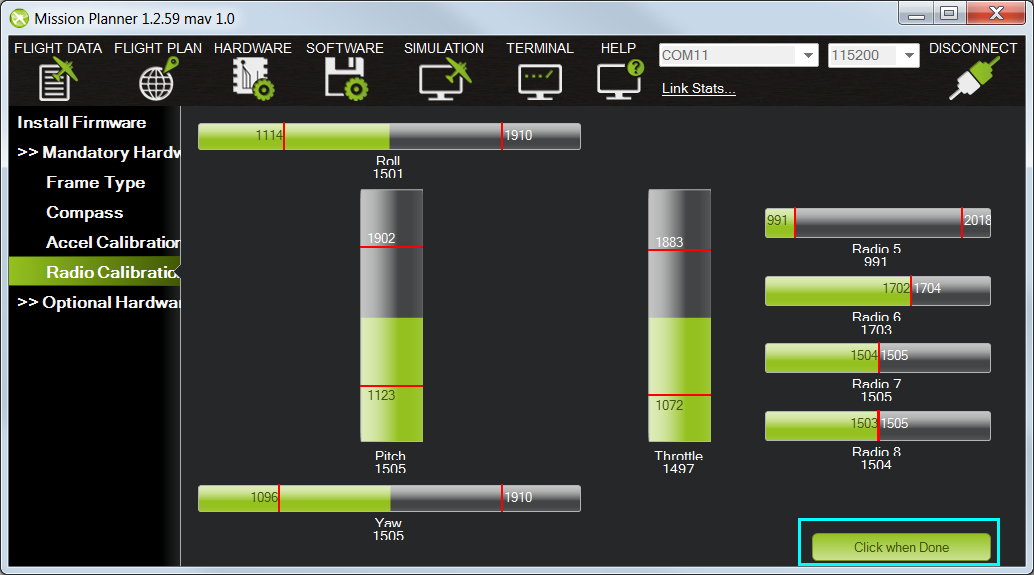
1 - First complete a radio calibration via the Inital Setup>Mandatory Hardware screen:
2 - No perform an all at once ESC calibration as shown in the video I posted in the above reply.
3 - Also verify your propellers are all connected the correct way around and not upside down, if you mount a prop the wrong way around they usualy still provide some lift, but very little compared to what it should be.
I hope that that helps, but if you complete those steps and still have the same issue with your arducopter just let me know and we can look at some more things in detail. Some photos of your quadcopter setup would also help.