Hi i have purchased a 6in Armattan Chameleon from drone scrap yard uk and it all seems ok but it seems to struggle under its own weight. could this have something to do with the motors. i am used to flying the hawk5 and that feels like a feather in comparison.
Here are the specs
Holybro Kakute AIO V1
TBS Unify Pro 5v (on a board under the fc)
Frsky X4r
Lumenier 2206 2350kv
Spedix 30a blheli_s esc
VIFLY lost alarm buzzer
and 1550 75c tattu 4c
I have tried with both 5 and 6 inch props and it made the slightest difference. but the way it flies at the moment i prefer the hawk5
I have footage i can upload and any suggestions would be appreciated
Yeah make sure that your throttle range is correctly calibrated and also I suggest re-flashing the latest betaflght firmware with full chip erase and set everything up from scratch again. Sometimes people limit the maximum throttle to make it easier to fly when starting out so maybe that is what has happened.
Otherwise the motors and setup should be powerfull enough, unless your frame is made from lead what is the total weight of your quadcopter ready to fly?
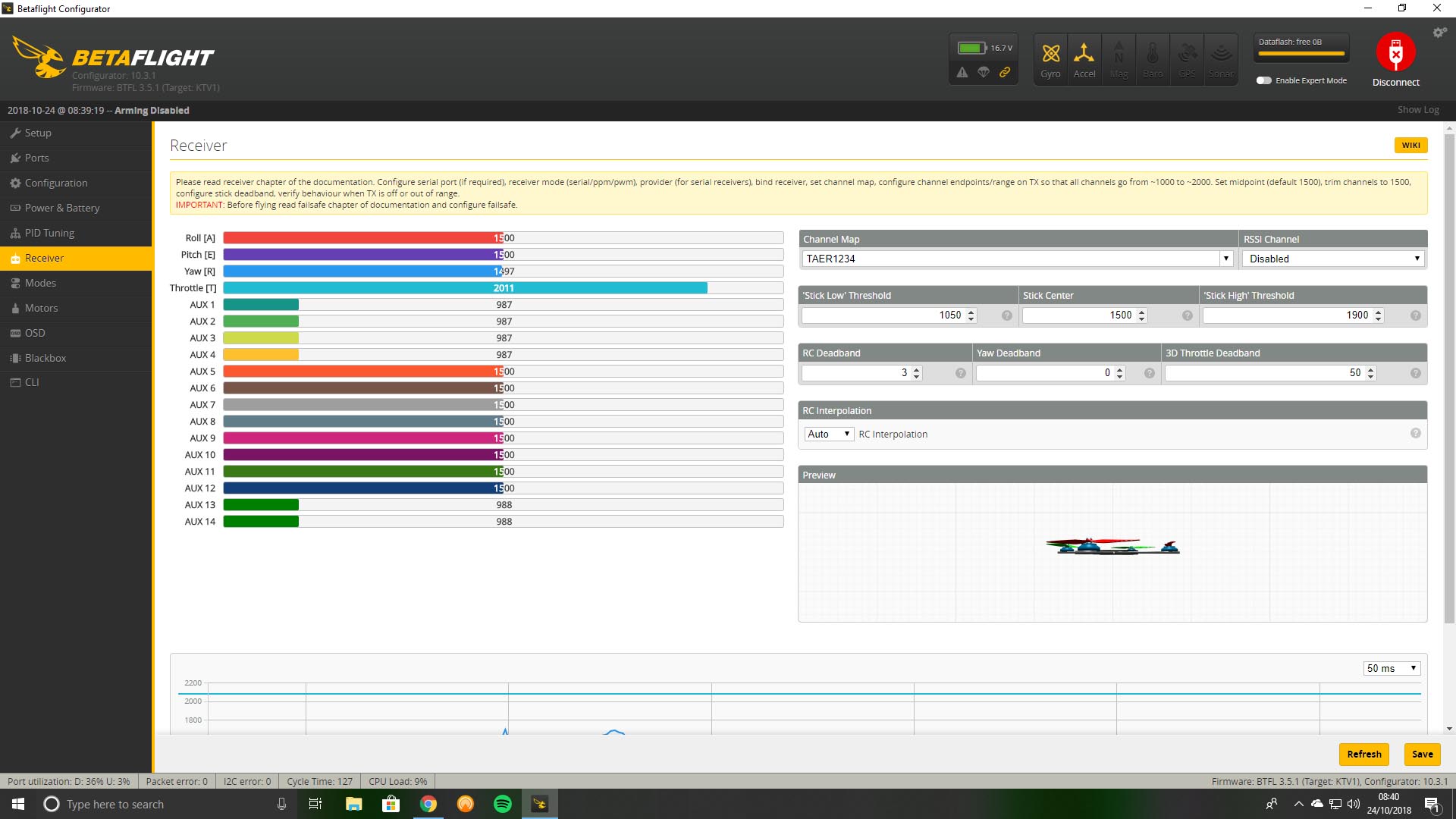
Hi thanks for getting back to me. The sticks go up 2011 on throttle and the total weight without props is 644 grams. I’ve never re flashed the firmware with full chip erase before. i’m sure ill be able to find a video for that. i have included the current betaflight receiver tab in case there is anything obvious i am missing
It’s 681g with everything on. I just took a moment at the local park to test it. and those changes seem to have made a difference. i didn’t get to test it for long as i crashed it and a motor was smoking when i tried to fly it again. Will i need to replace the motor and the esc or just the motor?
Thanks again
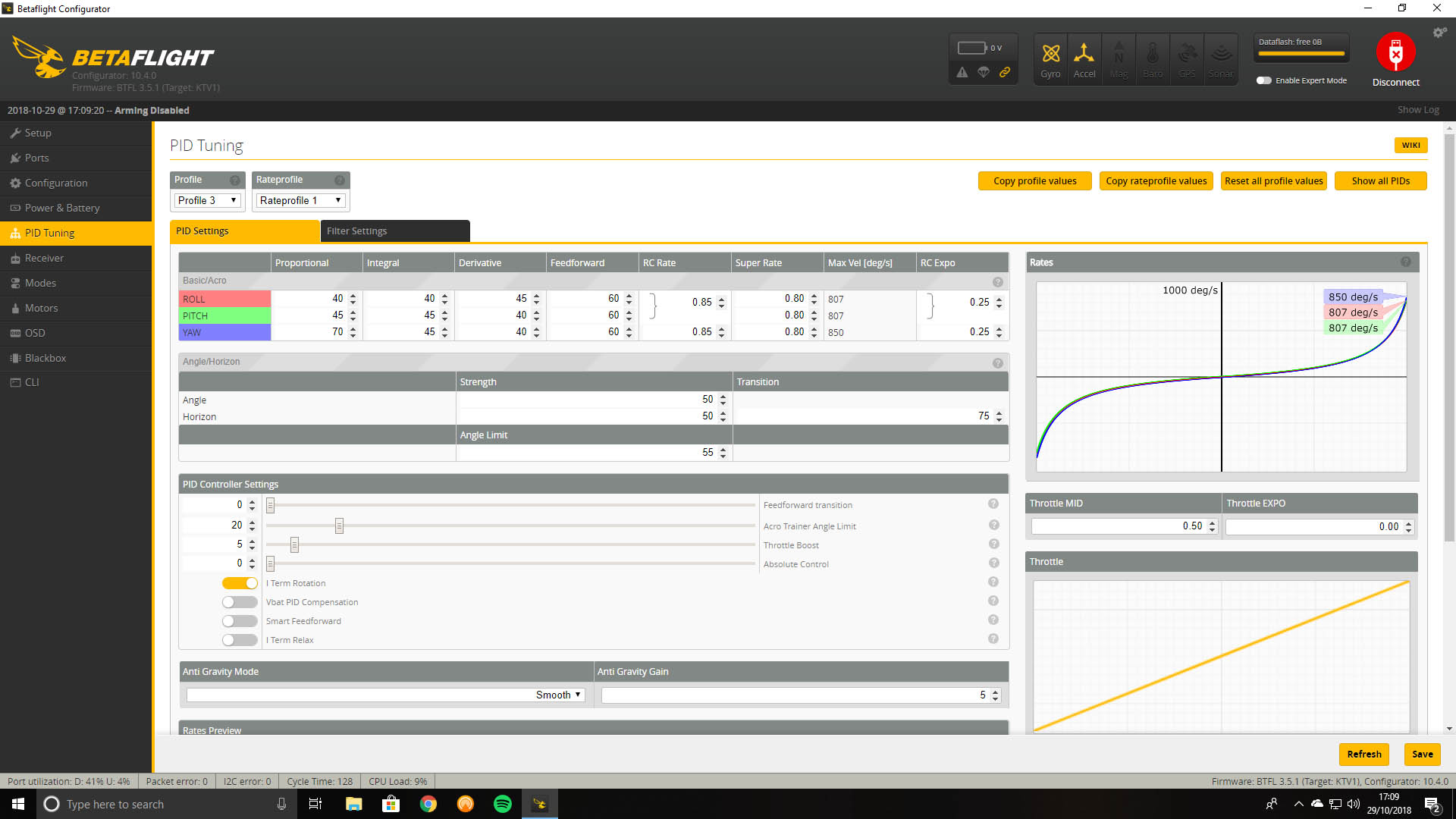
Normally the best way to burn a motor is with too much D gain…
Can you post a picture of your PIDs?
Did you crash and then try to fly back, cause that with a damaged prop can smoke a motor too.
Are your motors hot when you land?
Your camera tilt looks a little low… try raising it to 25 degrees.
Its hard to say… it could just be the motor… or a faulty ESC that caused the motor to burn.
If you replace only the motor and the ESC is damaged you risk killing another motor.
If it was me… I would just replace the motor and see.
Cheers man. I crashed into the top of the tree but luckily it fell down and it looked like nothing was wrong, not even a broken prop but when i tried to fly it again the motor was making a rattling noise and a kind of burning electronics smell and was tipping to one side slightly and then smoke came out of the motor so i landed it.
I hope my pids settings arent to stupid i was trying to tune out some of the jello and i had seen in a video that can be done by increasing the D gain.
After the crash i noticed the motor that smoked was hot but the others was cool. they are always surprisingly cool after flying. I did change the d gain in yaw before i went out to fly yesterday as the option wasn’t there before i updated betaflight. Should i put that back to zero?
I have a motor coming today so i was hoping to minimize the chance of it being down to bad tuning.
Thanks again
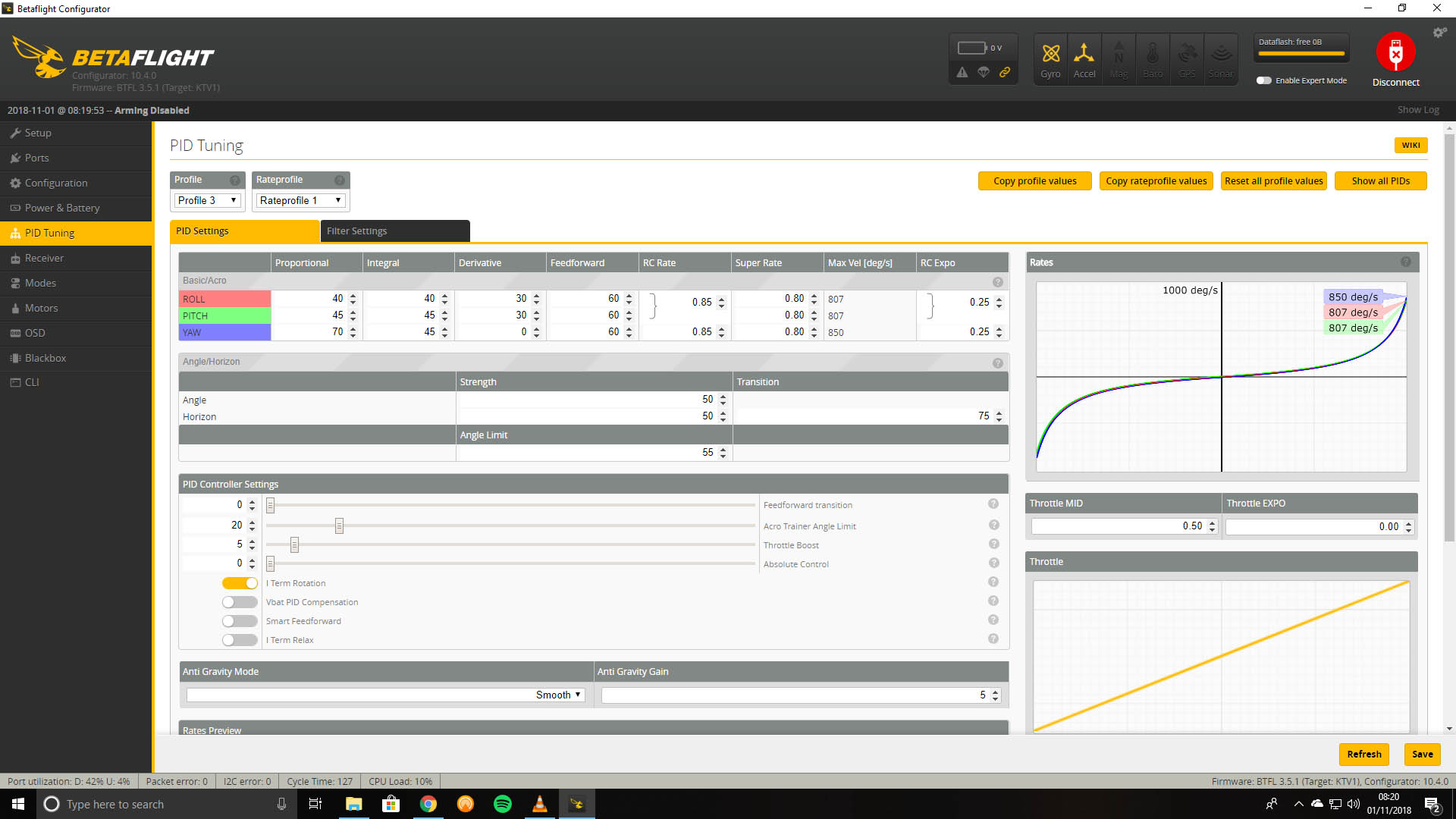
D gain on Yaw is a lie… its not there… just put it back to zero
** Yaw D is experimental. For normal quads, do not add any D to yaw, or you’ll likely get mad yaw oscillation.** Yaw D may be useful for tricopters.
Your D’s do look a little high to me for your P gain’s
P and D is a balancing game. but if you motors are cool after you land then your D gain may not be a problem.
Make sure you FC is still correctly fitted and you haven’t snapped a standoff thats causing extra vibrations into your FC.
after you fit you new motor…
Do a short 30sec flight just a hover to check motor temps. ( and listen to your motors in flight )
then another 30 sec flight with some flips and rolls and then check your temps again.
Hi the motor arrived nice and early today i have test hovered and the motor i replaced was hot and the rest was fine so im just double checking its a replacement esc ill need also?
So the new motor gets hot…
Then I’m afraid the only thing left is to replace the ESC as well.
Maybe your ESC has gone bad and thats what killed the old motor.
Good job you did the test hover first.
I would replace the ESC before flying it again.
If the motor is hot after 30 seconds you don’t want to risk burning it out.
At least its not money wasted cause your old motor did smoke and you didn’t kill the new motor.
Yes thank you for that advice (: as i may have just flown it normally otherwise and wasted the new motor. Just ordered A new esc from unmanned tech now. (: I’ll Keep you updated
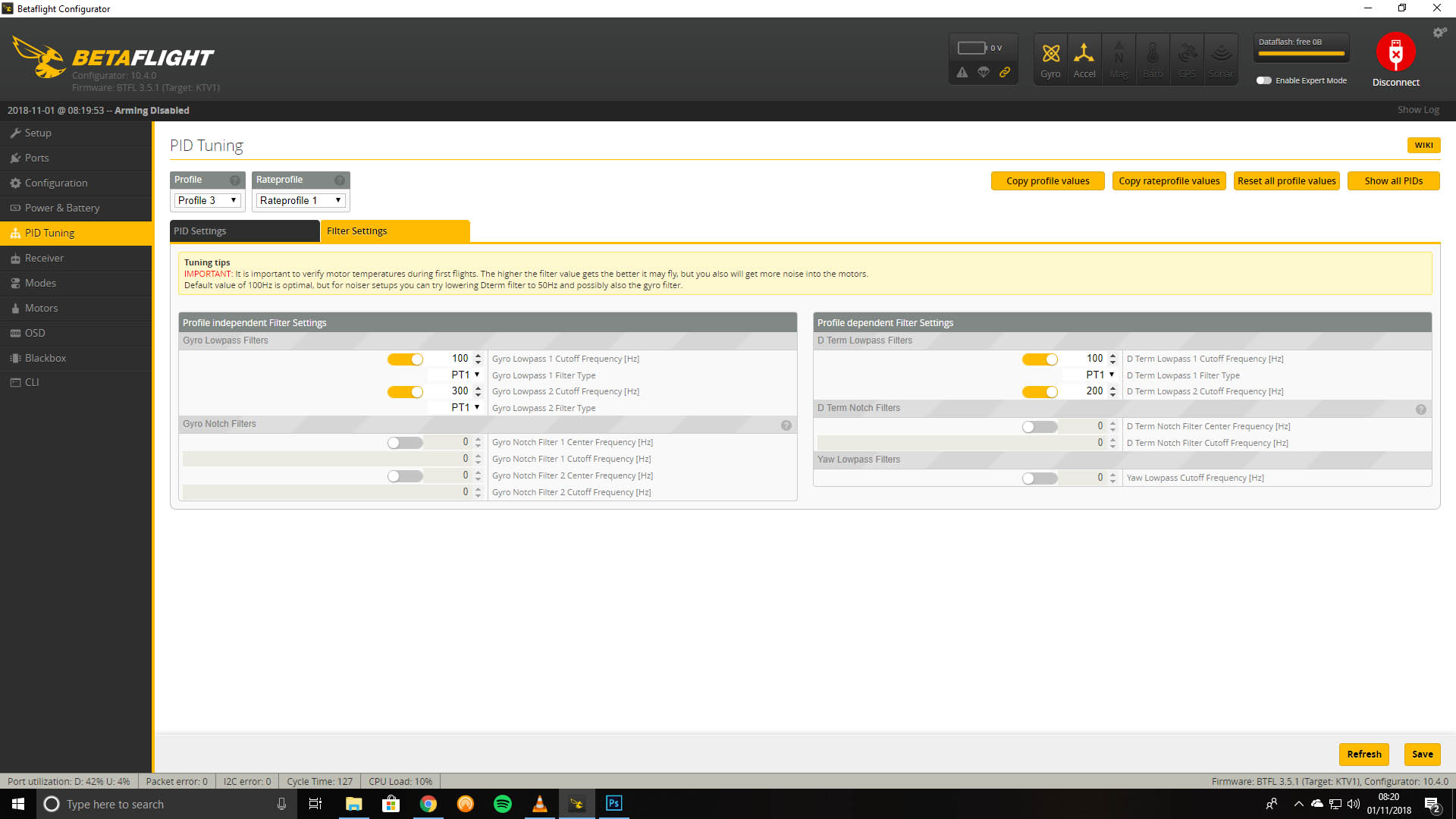
Good morning. I swapped the esc and did a 30 sec hover test and the motor isn’t to hot to touch but it is warmer than the rest could i have done something wrong or the problem be with something else. i have also lowered my D gains. i am attaching a screen shot of my pids and the filters tab in case there is anything wrong there although i have never changed anything in the filters tab
So the motor is warm after lowing your D gains… ( we could be onto something )
Try dropping your D gains down to 25 on both pitch and roll.
This will probably effect your tune but at the moment I think its more important to stop your motor smoking.
Also look closely at the bottom of the motor to make sure none of the motor screws are touching the motor winding’s from underneath.
i would like to know how to get blackbox from the fc ill have a look at a how to and get that data. ill lower the d gains down to 25 also. When i received the drone the screws holding the motors was rather lose but when i tighten them up on the warm motor has a slight resistance when turning the motor itself compared to the other 3 motors. Ill do all these things now
I have just done another test hover after lowering the d gains to 25 i think it solved the the problem at least to the point where it is really hard to tell what motor is warmest. it seems the two back motors are slightly warmer but i might be imagining it. really hoping that you’ve solved it. ill buy a mem card and do get the black box details to be sure. Looking good so far. Thank you.
 what is the total weight of your quadcopter ready to fly?
what is the total weight of your quadcopter ready to fly?