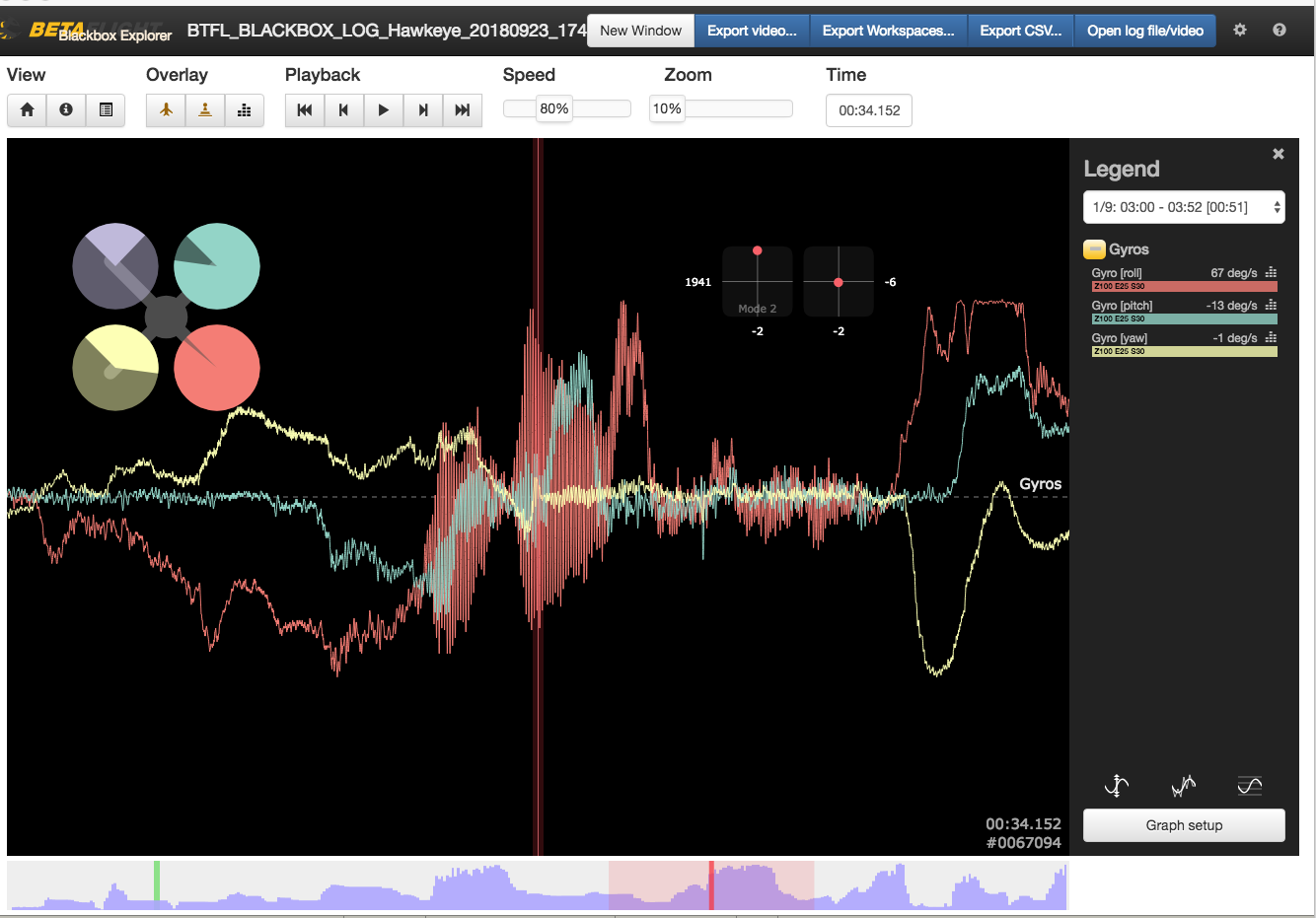
This is from my Hawk 5 - I’m guessing this is not good?
well hello there…
first off i’m not BB expert
you do have lot of noise on your roll gyro but you are full throttle.
but looking at that full throttle… your left two motors are barely working and that back right motor is flat out…
Can you post the full file?
Too big to upload, but try this link https://1drv.ms/u/s!Apqj8bkNxz3QgfU2KEd6b9altgk9Eg
Good point about the back right motor, wonder if that’s what is causing yaw issue I posted a while back on here.
Although it was f’n windy when I was flying - guessing that could also be an issue?
can you dump your cli as well
and any build parts list. is it a default hawk 5 (which one)
To me it looks like your switching between angle/horizon/acro mode.
angle and horizon modes always act weird cause they fight what your doing.
Your D gains look high.
30 looks a little high are your motors getting warm?
I can see some D term oscillations in your bb log.
and you have airmode switched off? why just why… turn that on and smile.
your gyro is running too fast for oneshot125
set your gyro to 4k/2k
hawk 5 default to dshot 600 yours is set to oneshot125?
It maybe a good idea to flash default PIDs and filter settings.
Hi Jason,
Thanks for the help on this - this is really helping me understand the quad config more. To answer your questions…
Which Hawk 5 - this one Emax Hawk 5 FPV Racing Drone (BNF) - Unmanned Tech UK FPV Shop ![]()
- Clean build using the proven Magnum F4 Tower System
- Stackable Omnibus F4 Flight controller
- 30ax 4 DSHOT 600 ESC
- Frsky XM+ receiver (D8 mode)
- 25/200 48ch 5.8ghzVTX
- Vibration Dampening Suspension System
- Built-in OSD with realtime readouts from Battery Voltage, Flight time, to Receiver Signal Strength
- Foxeer Arrow Micro v2 600TVL CCD camera with a sharp wide angle 150 degree lens
- Lightweight Dipole Whip or Circular Polarized RHCP/LHCP Pagoda Il Antenna Included
- Powerful EMAX LS2206 2300kv motors
- Avan Flow 5 inch Propeller designed for control and efficiency
No mods done to it, literally flown it out the box.
I’m wondering if when I flashed Betaflight up to 3.5.1 and then back down to 3.3 whether it lost the settings.
I’ll tweak the gyros and change settings, and flash default pid’s and filter settings.
Will let you know how I get on.
Thanks again ![]()
BTFL_cli_Hawkeye_20180926_073542.zip (5.2 KB)
Here a link to the Hawk default CLI dump
# version
# Betaflight / OMNIBUSF4 (OBF4) 3.2.2
I agree that is alot of noise on the gyro… but the best thing to do is to look at the rc_command value as well. I had a situation when my quad had a slight yaw on full throttle. When looking at the logs it turned sour that without realising I always moved the yaw stock slightly at full throttle. So it was just my fault for the way I was holding my radio!
So when I look at logs the values I like to compare is Rc command (your stock inputs), gyro readings (to check for noise/brownouts) and also the motor command (what betaflight sends to your motors) and then the imu information (the angles betaflight calculates).
That way you can kind of see what is going on… so if you have some gyro noise but the motor output/angles match up with what commands your are sending your quads then it’s not the cause of the issue.
Thanks Alex, some good tips there which I’m hoping I won’t need. Currently hoping that Jason’s diagnosis will fix the problem. However if it doesn’t - will be interesting to then look at RC commands. Flying on Saturday (weather permitting) so watch this space 
1 Like
Well problem solved (so far). Re-flashed the FC with Betaflight 3.5.1 then configured as per DommedFPV instructions. I stuck a couple of bi-blade props on (that’s another story) and made sure ESC’s were set to Dshot 600, and airmode on. After a very odd take-off; very bouncy, the Hawk settled down and flew like a dream. I’ve changed the props back to tri-blade and will give it a go with some anger later in the week.
2 Likes