I have been flying my quad copter (specs below) it has a twitch on the yaw axis (noise to gyro? but esc ,fc ,camera,vtx are soft mounted so not that?)
So i have started using black box logging to see the full picture I have done a lot of tuning and it flys better however the twitch is still there.(at this point I suspect one esc/motor is about to die)
when finished flying organising footage and logs i noticed the twitch on take-off and the virtual sticks/rc command indicate I am twitching violently.(I know I’m not doing it) - so does this mean the issue with the yaw is between the receiver and betaflight then?
So what is the fix re-bind? new receiver or even worst a new transmitter! or any other suggestions as to cause and fix.
I have attached the chosen black box+video file (key) yellow -yaw,red-roll,green-pitch and purple-throttle.if the original files are needed i do have them.
Thank you for your time.
specs
tbs 30-35A? esc dshot 300
emax rs2205s 2300kv
fc: matek f405
receiver: xsr
transmitter: (one of the first i believe) taranis qx7
betaflight 4.0.6
so i have just tried that yes it is . sometimes has a small glitch to 1480 or something happens so fast i can’t see, it only seems to happen when moving sticks up not at a set throttle point.
also looked at my radio doesn’t appear to affect yaw when looking at the stick values on the radio.
just remove rear of radio and make sure all wire connections tight. if still same in betaflight add some yaw deadband, if its moving to 1480 set deadband to 25 you wont even notice the difference. I always use 15 on yaw cos im old
I have now done what you said… I removed the back of the radio and got rid of some dust reinserted the same gimbals ,re-calibrated the radio ,re-bound the receiver and finally added in deadband.
unfortunately i cant yet fly due to weather but the yaw in betaflight no longer seems to move, so I will have to test fly at a later date.
thank you.
Ok well i went flying yesterday and have sorted out the video( https://youtu.be/9a1_oq_qGFc ) the initial result seemed ok but as the flight went on it came back in force, although as you can see from the video its not a false yaw on the input signal. but something else.
I might be of help it slowly drifts on the yaw axis to the left (ccw) .I’m new to black box but isn’t i supposed to prevent that as it’s a persistent error? does that mean maybe the fc has an issue with the yaw gyro?
1st i would definitely soft mount the FC, looks like you used soft mount at bottom then all above is nylon . Dont forget if soft mounts at bottom you have a thick cable going from PDB to battery and air from props will be vibrating this. in your OP you said all soft mounted which is correct but all on one mount at bottom, move the soft mounts above the PDB and then FC on them.
2nd are they original EMAX motors or copies. if they are copies the magnets in the bells come loose, spinning them wont show this (if copies) .
sound on vid poor but sounds like poor motor( but take that with a pinch of salt) do mounts first.
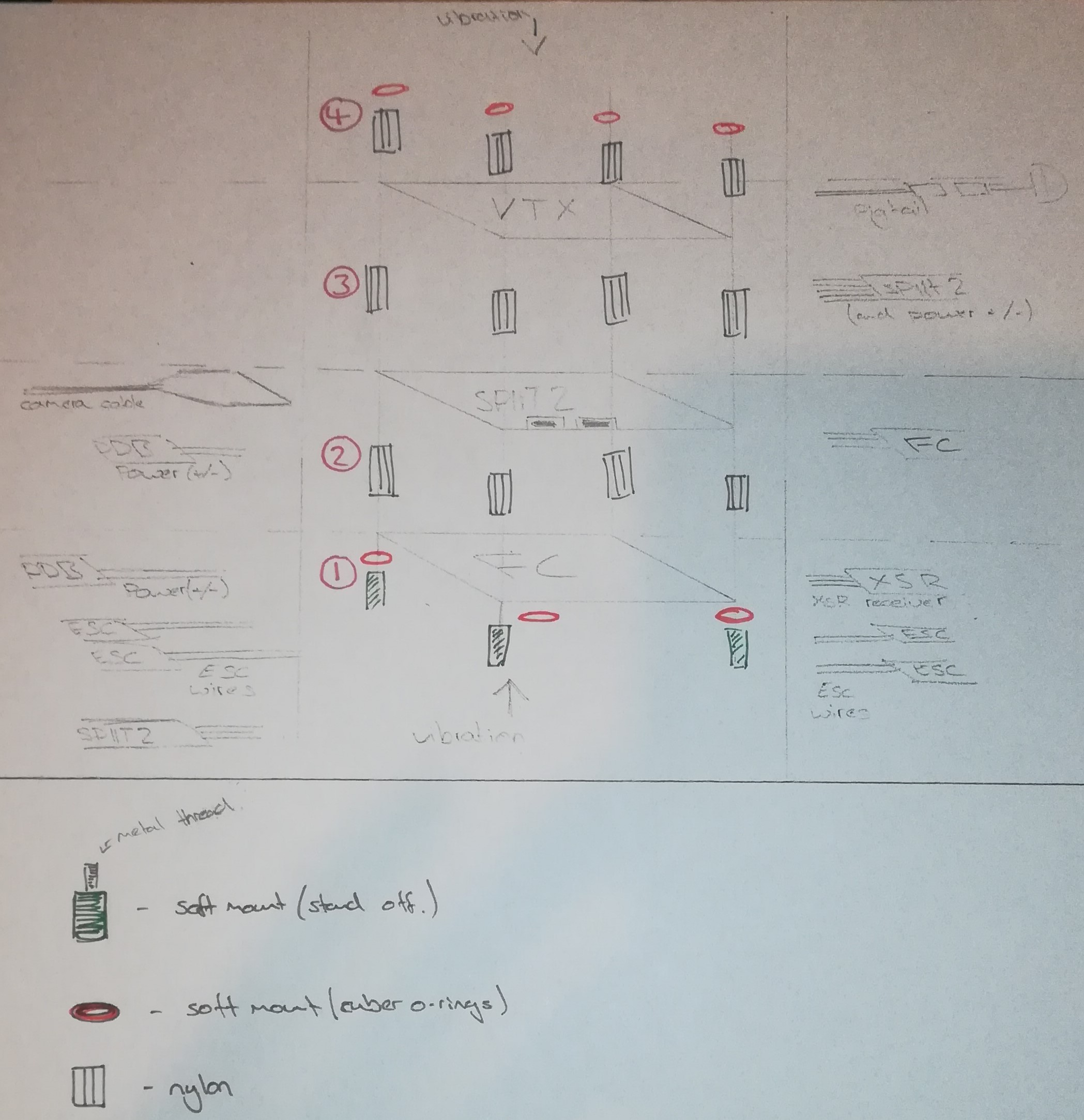
So before I change the mounting I’m getting confused about where so I’ve drawn my interpretation of what it think you said correct if I’m wrong and if I need more soft mounts as that’s all I have currently.
hope fully the numbering can help correct if I’m doing it wrong.
The battery cable needs so be lengthened so it can be strapped to the top plate then.
I don’t believe the motors are fake they cost 65~ for 4.but if I assume one motor is bad how do I tell which one the black box didn’t really scream dead motor but I am new to this.
sorry my mistake (your plate above arms is your PDB) didn’t realise you had a RCAM split though this was pdb. in the photo of your quad from bottom does it go FC, SPLIT, VTX. if so thats a lot of stuff above FC should be ok as long as all cables free to move especially the VTX pigtail.
just looking at video again,I would -20 from P -10 from I and -5 from D and all channels try this first. leave the YAW D at 5.
Thx, this helped alot the problem seemed to disappear when i zip-tied the power lead to the frame loosened the pigtail, changed the pids and ensured the fc was soft mounted correctly. (if you want video i can link one)