Hi guys,
I am undertaking a project to build a micro FPV racing drone kit, with a 3D printed chassis iterations.
Things went quite well to start, however we are now trying to optimise the setup.
At the moment, it is clear that we are not generating enough thrust to lift off, (current weight 58g).
The motors are supposed to produce 40g’s each however, in reality this does not seem to be the case.
There is very little data online about the Hubsan motors and props we are using, thus I have been unable to calculate thrust theoretically.
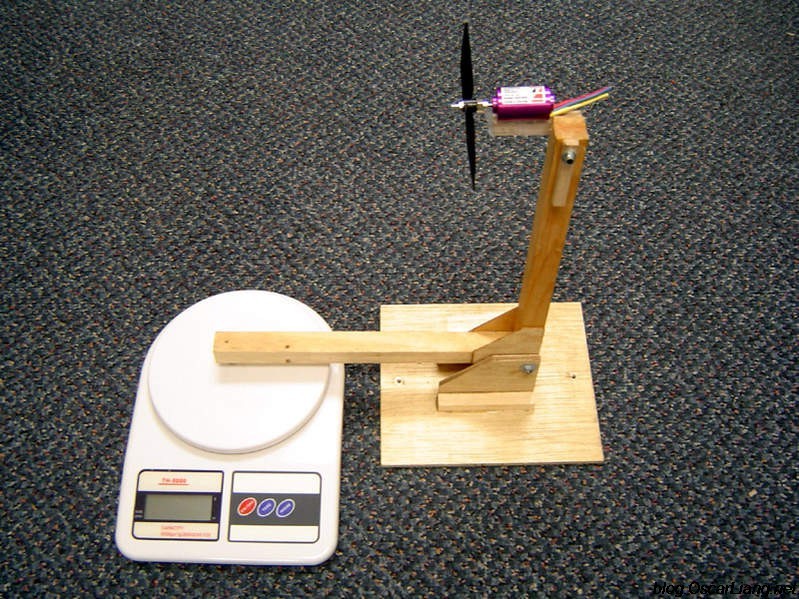
I am looking to build a rig that will allow me to measure the overal trust generated, in its assembled form.
So far all I have found is turning the quad upside down on scales with a between the quad and the scales, however the results i have found to almost random. (i did a test run using a factory assembeld hubsan X4 and it seemed to generate less trust than it weighs, which is clearly wrong as the the X4 files with great agility and speed.
Does anyone have any suggestions as to:
- What could be causing us not to get the 4og of thrust per motor (as adv)
- How to measure (inexpensivly) thrust of whole rig when assembled.
Thanks in advance!
best,
Rob