Using FrSky smart port telemetry on Naze 32 flight controllers is a little tricky to get working due to the limited number of UART ports available on the naze 32 flight controller with F1 processors. Using other naze 32 compatible flight controllers with F3 processors such as DoDo F3 make things abit easier.
However if you do have a naze32 and want to use your X-series receiver (such as X4R) with telemetry here is what you need to do. There are two options, the first one which is better is to setup your receiver to run in CPPM mode and not SBUS. However each option has some limitations due to the limited UART ports.
You cannot simply use the X-series telemetry connectors on the Naze32 since the newer X-series receivers work differently, but if you are using a Frsky receiver such as the D4R-ii then connecting telemetry is very easy.
Option 1 - Use CPPM and UART 2 for telemetry
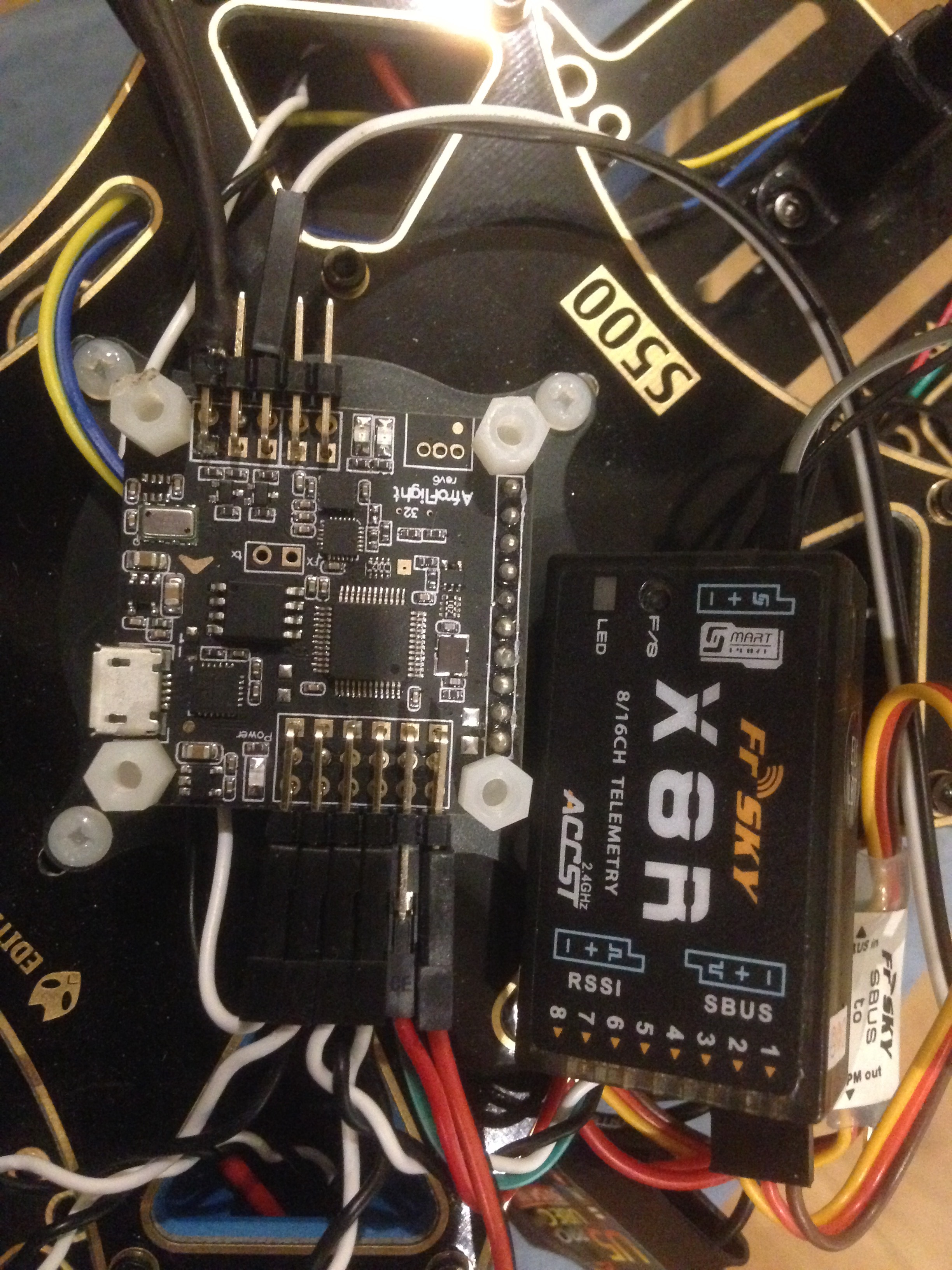
This is the preferred method where you bind your X4R receiver to output CPPM, and connect that to RC pin 1. You can still bind your X4R-SBUS receiver to CPPM mode.
You then need to short out the UART2 RX and TX pins. The reason why you need to do this is because the smart port works on half duplex, which means that it uses the same wire for both TX half the time, and RX for the other half. By connecting both the TX and RX pins together we can emulate this. The best way to do this is not to solder anything, but rather create a cable that shorts the two together.
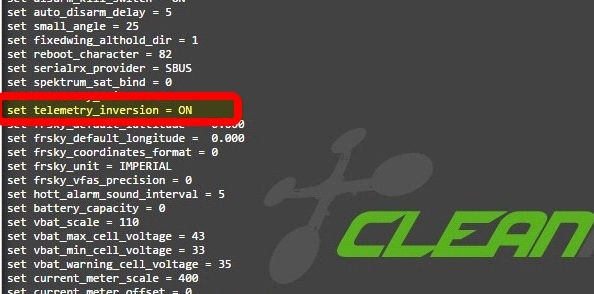
To enable telemetry you need to enable the Smart Telemetry on the UART2 port in the configuration of cleanflight. You must also remember to use the CLI to invert the telemetry, To do this you set the select_telemetr_inversion = ON
Option 2 - Use SBUS and Soft Serial for telemetry
Although the Revision 6 of the Naze 32 has direcet support for SBUS, this uses the UART2 port on the flight controller. This means that you will then need to enable softserial to emulate another two UART ports so you can use one of them for telemetry. However the problem by doing this is that you cannot then use an RGB LED with your quadcopter since softserial uses the LED pin for this.
Just as before you will need to short the TX and RX pins (RC pins 5 and 6) to emulate half-duplex mode for telemetry.
Now you just need to set the softserial port to be smart port telemetry and again you must also remember to use the CLI to invert the telemetry, To do this you set the select_telemetr_inversion = ON
Hope that helps and if you have any other questions please let me know below.
 ) Any ideas on what i could be doing wrong ? thanks !!! just had to arm the board ! you were right
) Any ideas on what i could be doing wrong ? thanks !!! just had to arm the board ! you were right 
 as the naze only measures total battery voltage
as the naze only measures total battery voltage