The Naze 32 Rev 6 board has made some nice layout revisions such as finnaly having the USB board mounted on t he side for easy access on your miniquad al last!
Whats new in Revision 6?
- USB port has been moved to the right of the board so you dont need to mount the board sideways anymore!
- IMU sensors upgraded to MPU 6500 (Rev 5 uses older MPU 6050)
- Receiver connectors are no longer solder pads but common pin hole headers style. This means that you no longer need to directly solder your receiver wires to the flight controller. Also older revisions had issues of pads delaminating when board got too hot.
- Fully pin compatible with Rev 5 boards for accesories such as OSD.
- Integrated SBUS inverter, now you can connect your FRsky SBUS receivers directly with no extra inverter!
- Dedicated Spectrum Satellite port.
- Additional Flash memory so you can use blackbox recording directly. With the Acro version you get 2Mb (16Mbit) and the Full version you get 16Mb (128Mbit). To learn more check our guide on Naze 32 versions.
Naze 32 Revision 6 Pinout
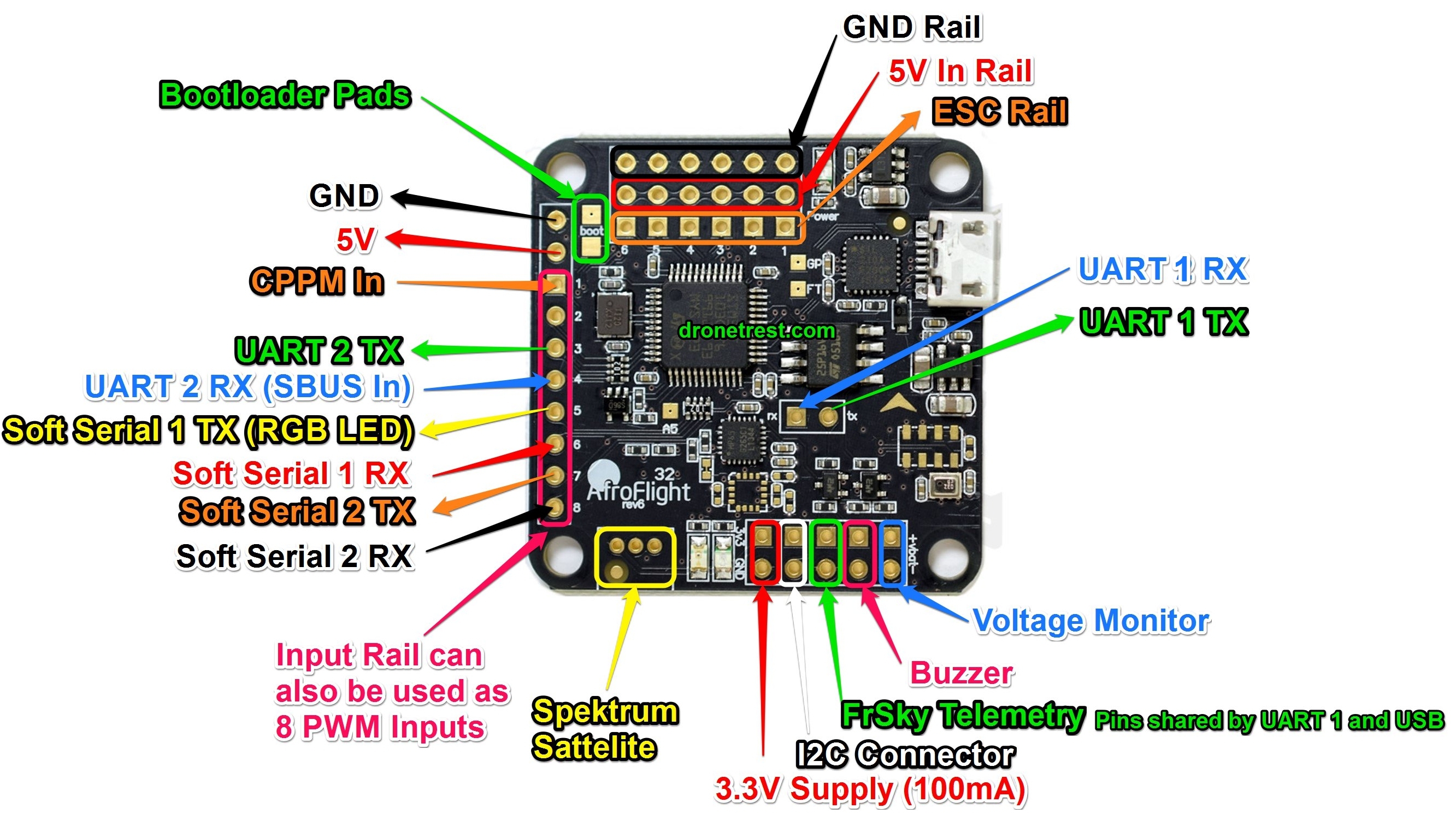
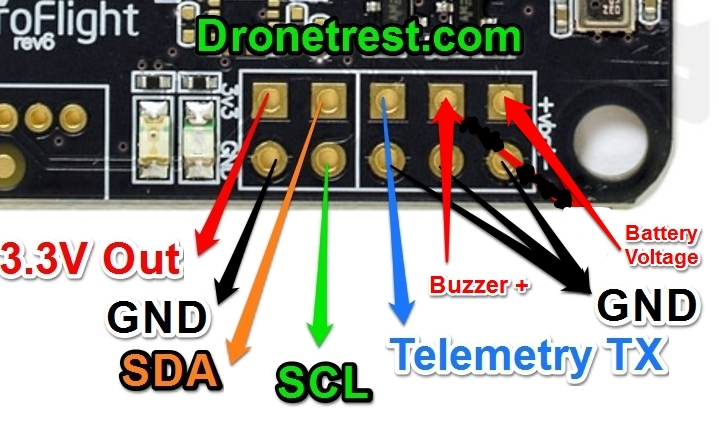
Here is a closeup of the auxillary connectors on the Naze 32 board which include an extra 3.3V output at 100mA, a I2C connector, the buzzer connector, and battery voltage monitor pins. One thing to note is that the Frsky Telemetry pins are shared by the UART 1 TX, which is in turn shared by the USB. So if your board is connected to your PC via USB you cannot use the UART 1 ports.
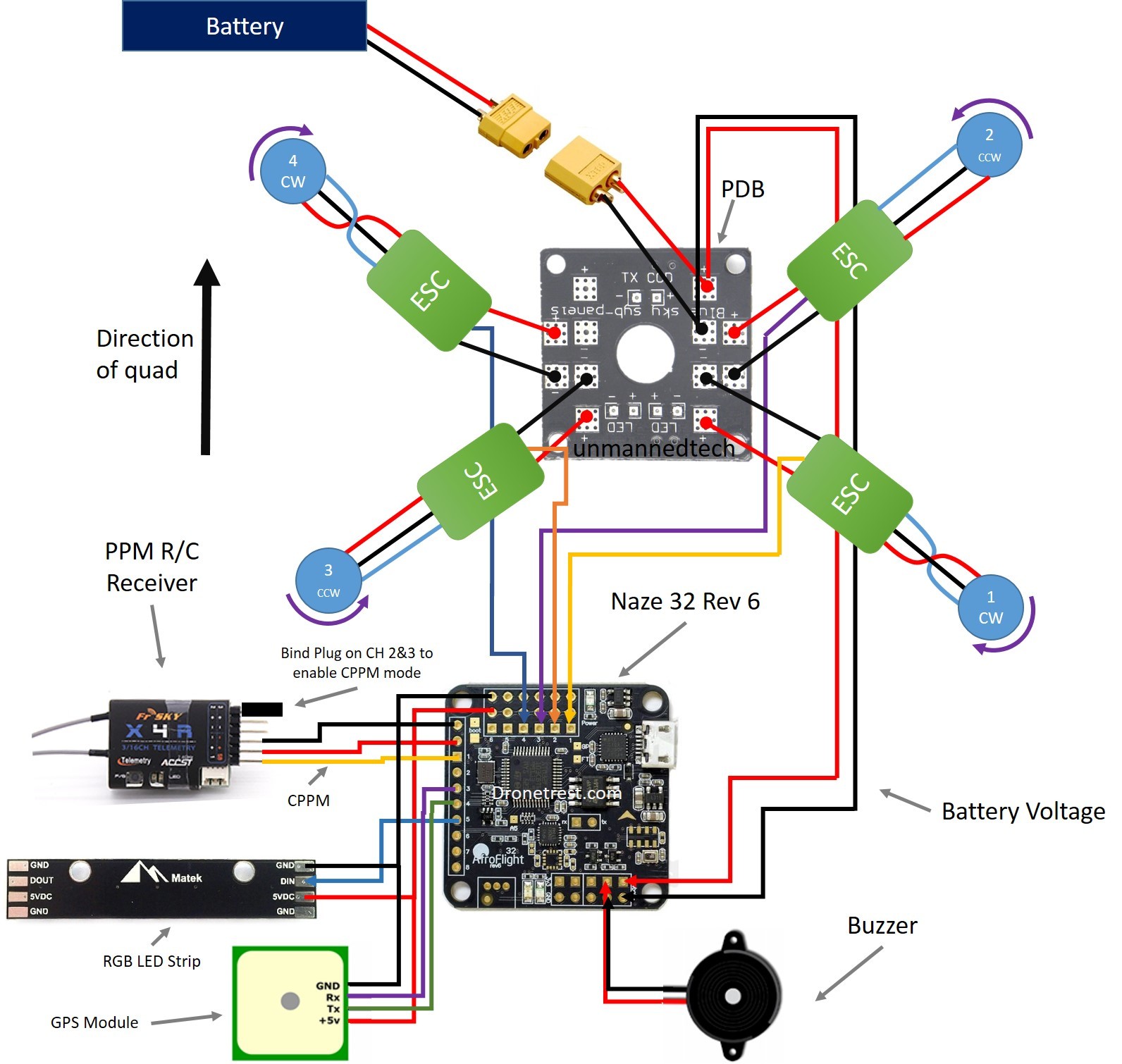
Typical Naze32 Connection diagram
The diagram below shows a fairly common setup on a FPV racing quadcopter using a CPPM receiver, optional GPS module, and an RGB LED bar.
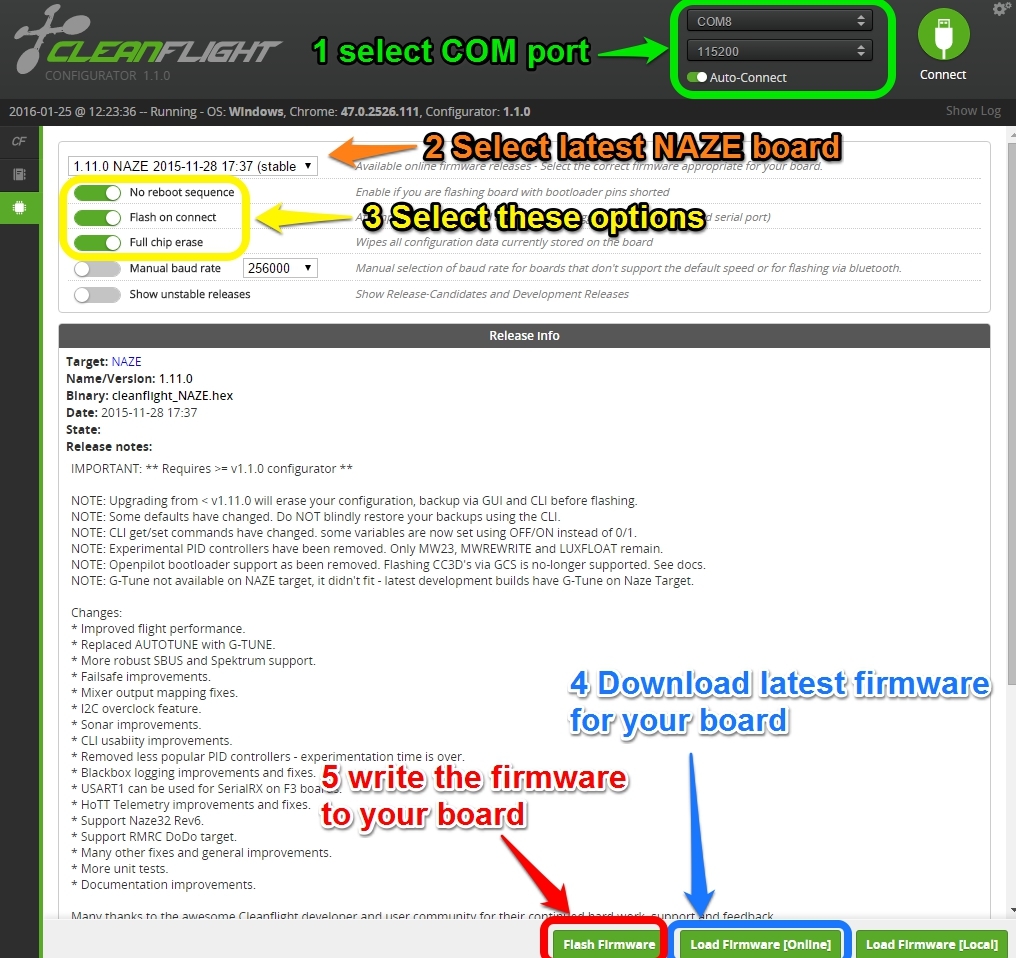
Flashing Cleanflight onto Naze 32 Rev 6
Contrary to many forums it is definitely possible to load and run cleanflight easily on the Rev 6 Naze 32 boards that we sell. Once the board is connected to your PC the drivers should install automatically. Then launch the cleanflight GUI and write the latest firmware version to your board as shown below.
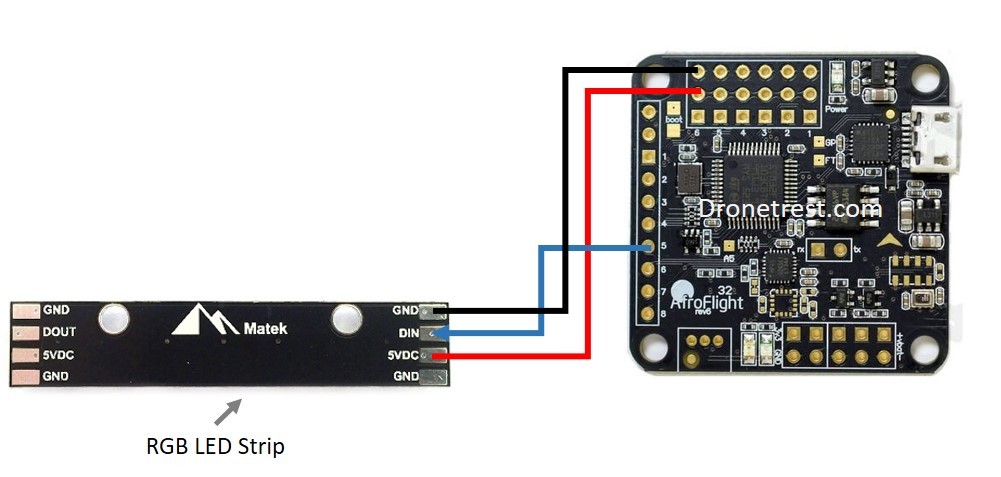
Connecting a RGB LED strip
Adding an RGB LED strip to your Naze 32 is one of the coolest features for FPV flying. Not only does it let you see your quadcopter easily, but you can also add smart features to your LED, so when you are turning left, the Left LED’s can flash. When you slow down the lights can glow bright red, just like a car brake lights.
Depending on your RGB LED strip power requirements you might need to connect it directly your battery, or BEC. In the diagram below the LED stip runs on 5V so we can power it directly from the ESC rail. The control signal plugs into RC 5 on your naze32.
Once connected you will need to configure the RGB LED strip in clenaflight. Here is a great video showing you how to do this.

Using integrated Black-box Recording to SPI dataflash
Since hte revision 6 of the naze32 boards include a built in blackbox recorder, it is very easy to get this working. Rather than re-writing everything here is a great video by Roberto Correia showing the process of enabling the blackbox via cleanflight CLI and how to view the logs after a flight.

Naze 32 Soft Serial
Since the Naze32 only has two hardware UART ports, of which one of them is used by USB. So this introduces some issues if you want to use a bunch of accesories with your Naze32. Fortunately you have the option of using softserial which emulates an extra two UART ports on RC pins 5,6,7,8. However if you enable soft serial you will not be able to use those ports for other things such as RC 5 for your LED bar. My suggestion is to use a CPPM receiver so that you can use the dedicated spare UART2 port for something like GPS.
Connecting a SBUS receiver
Is it possible to connect a SBUS receiver (such as the X4R-SB) directly to the Naze32 Rev 6 flight controller, but by doing so you will be using the UART2 ports and will not be able to use UART2 for other things such as GPS. However I would suggest you try to rather use a CPPM receiver (X4R-SB can be used in CPPM mode) as this will keep the UART ports free on your NAZE 32.
Connecting FrSky Telemetry
With the older D series receiver (like the D4R) connecting telemetry is fairly simple by connecting the green wire from your D4R to the telemetry pin on the flight controller.
Connecting Smart Port Telemetry
When it comes to the newer X-series FRsky receivers, telemetry connection is a little more tricky. To use this you will need to use the softserial feature on cleanflight. Doing so means that RC pins 5,6,7,8 will be used so you cannot use your RGB LED bar in addition to the smart port telemetry. For full details check our our guide on how to setup smart port telemetry on your flight controller.
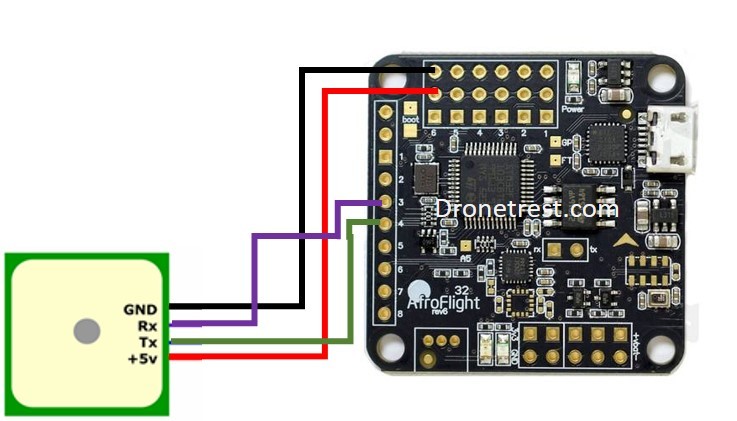
Connecting a GPS Module
If you are using a 10DOF or Full Naze 32 board then you can add a GPS module to use extra flight modes. Connecting it to the UART 2 ports is fairly easy and straight forward as shown in the image below. You will need to power the GPS module from the ESC rail.
Once connected you need to enable it within the cleanflight GUI. The important thing is to make sure the baud rate is set correctly within cleanflight to match the baud rate on your GPS module. If you are not sure you can play around with teh various baud rate settings untill one of them works. However most modules run on 57600.
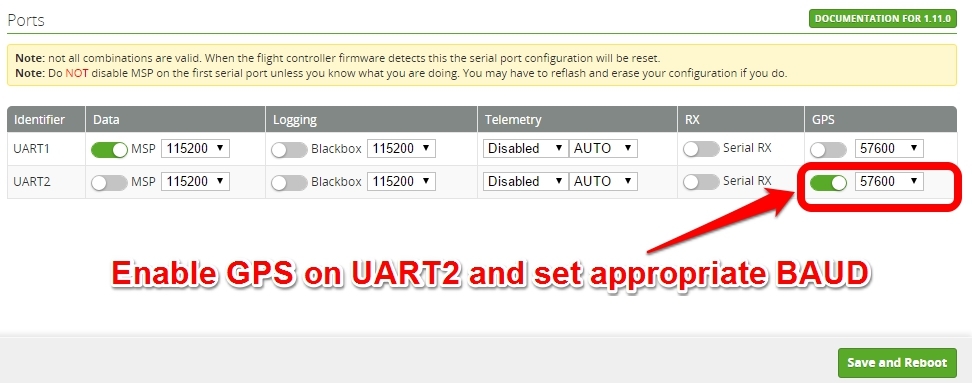
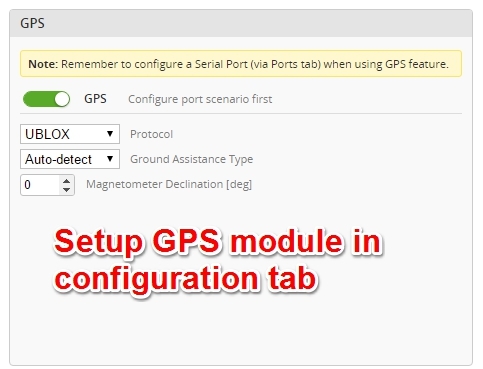
Once the serial port is configured, you will need to set the GPS settings in the configuration tab.
Naze 32 LED’s and their meanings
Each naze 32 has three LED’s on the board, one located close to the USB port to indicate if its powered or not. The other two are located next to the spektrum connector and are used to provide some details as to what is happening on your flight controller according to various flashing sequence:
- Red+Green + Blue on solid - device is in bootloader mode
- Green flashing - indicates the board is not armed (if you cant get your board to arm see below)
- Green on solid - the board is armed
- Green + Red on solid - board is armed and is in horizon / self level mode
- Red + Green flashing one after another - board is calibrating accelerometers / compass
I cant get my Naze32 to arm
It can be rather annoying to build and setup your quadcopter and when you arrive to go fly, it will not arm. So its always a good idea to check its working after setting it up before going out to fly. However from time to time it might not want to arm so here are a few common mistakes that prevent your Naze 32 flight controller from arming.
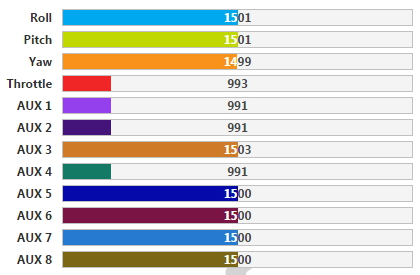
Make sure your radio is setup correctly
When you are setting up your cleanflight board, make sure that your radio settings are correct. This means to make sure the challens are are correctly assigned and not reversed (when you move the throttle stick upwards you see the throttle channel moving upwards on cleanflight). Also make sure the range is between 1000-2000, if not you will need to change either the settings on your radio, or use the cleanflight command line as discussed here
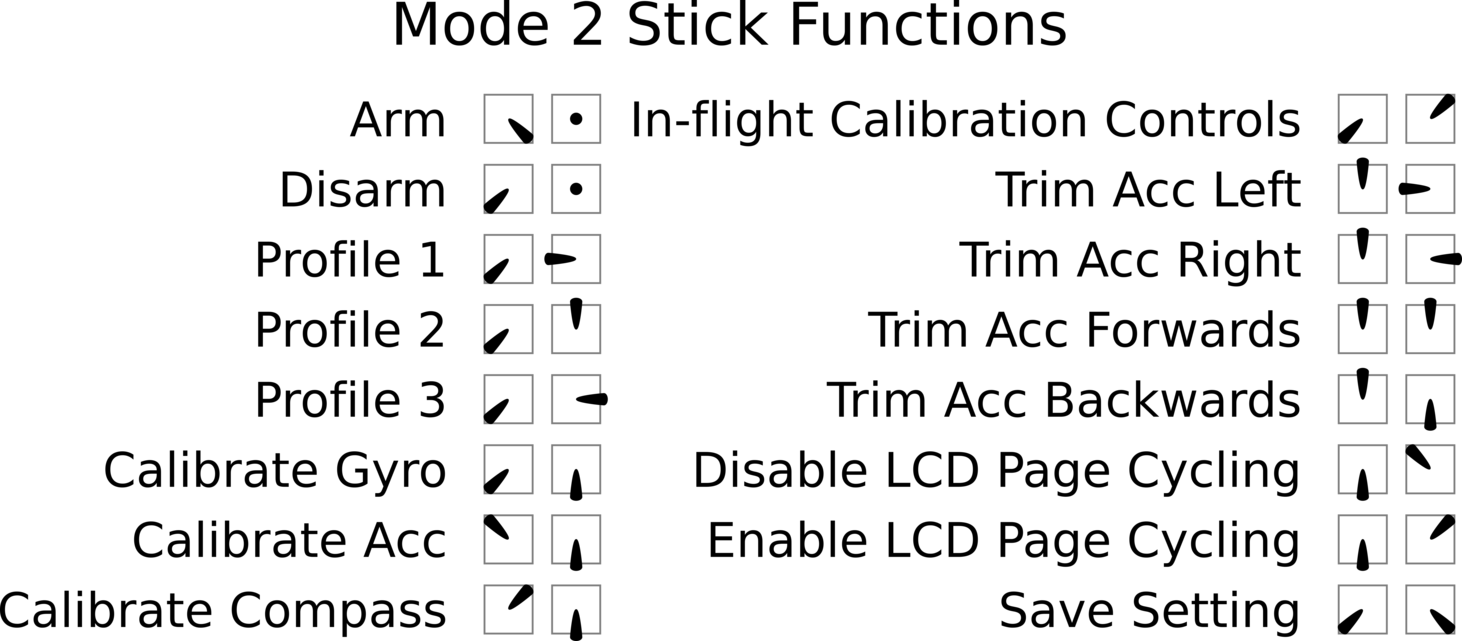
Make sure you have performed sensor calibration?
If you have not yet calibrated your accelerometers, and compass (only on 10DOF boards) on your board. An easy way to do this is to make sure your multirotor is on a level surface, with battery connected. Then on your R/C controllor move the sticks to the appropriate positions as shown in hte image below for the Gyro and ACC calibration:
Check your throttle failsafe
A common error is the PWM failsafe value that is set on cleanflight. Cleanflight has a failsafe to turn off the motors and disarm if it looses connection to your R/C controller. However sometimes this might be higher than your actual radio thottle idle value, so the failsafe would activate (requireing you to restart your board before it will allow you to arm again). So you will either need to change the throttle idle value on your radio, or change the value within cleanflight. But please make sure that you do set a failsafe and have configured this on your R/C receiver as you dont want your drone to fly away accidentally.

 But its great to receive some feedback so that all of our guides are actualy useful as I might of missed something obvious
But its great to receive some feedback so that all of our guides are actualy useful as I might of missed something obvious
