In this guide we will show you how to quickyly get started with your Pixhack autopilot. The Pixhawk autopilot is a variation of the popular pixhawk autopilot, and although it uses the same sensors, it has been re-designed from the ground up to make include a vibration isolated IMU for better performance. The Pixhack is fully compatible with APM/PX4 firmware stacks.
Pixhack Overview
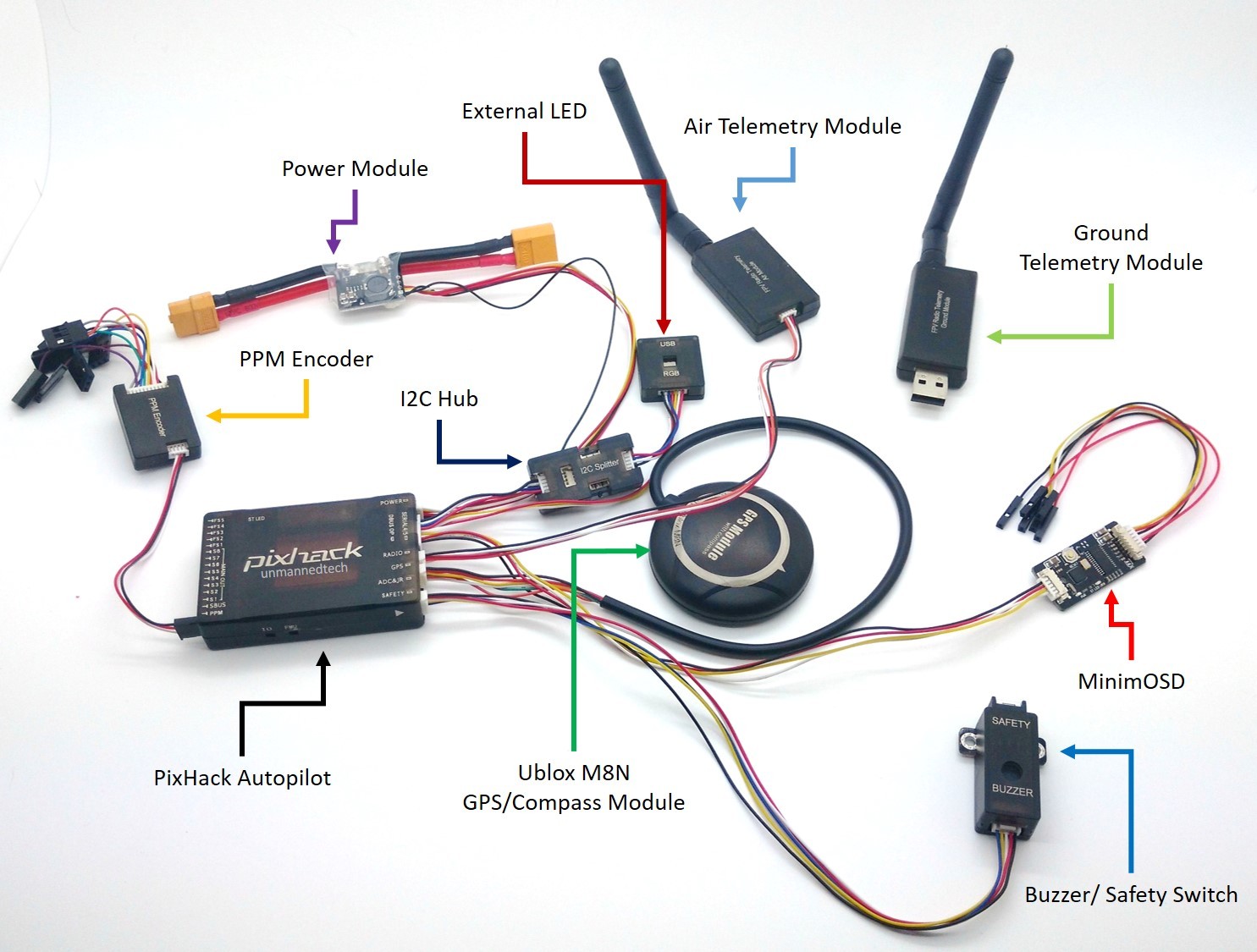
The great thing about the Pixhack autopilot kit that we sell, is that it includes all the accesories that you could possibly need. Each of these include a pixhack compatible connector. You can still use other accessoried designed for the original pixhawk, but you will most likely need to change the connector as the pixhack does not use DF13 connectors common with pixhawk modules.
The connectors are all clearly labeled and can only go in one way so you dont need to worry about connecting something upside down.
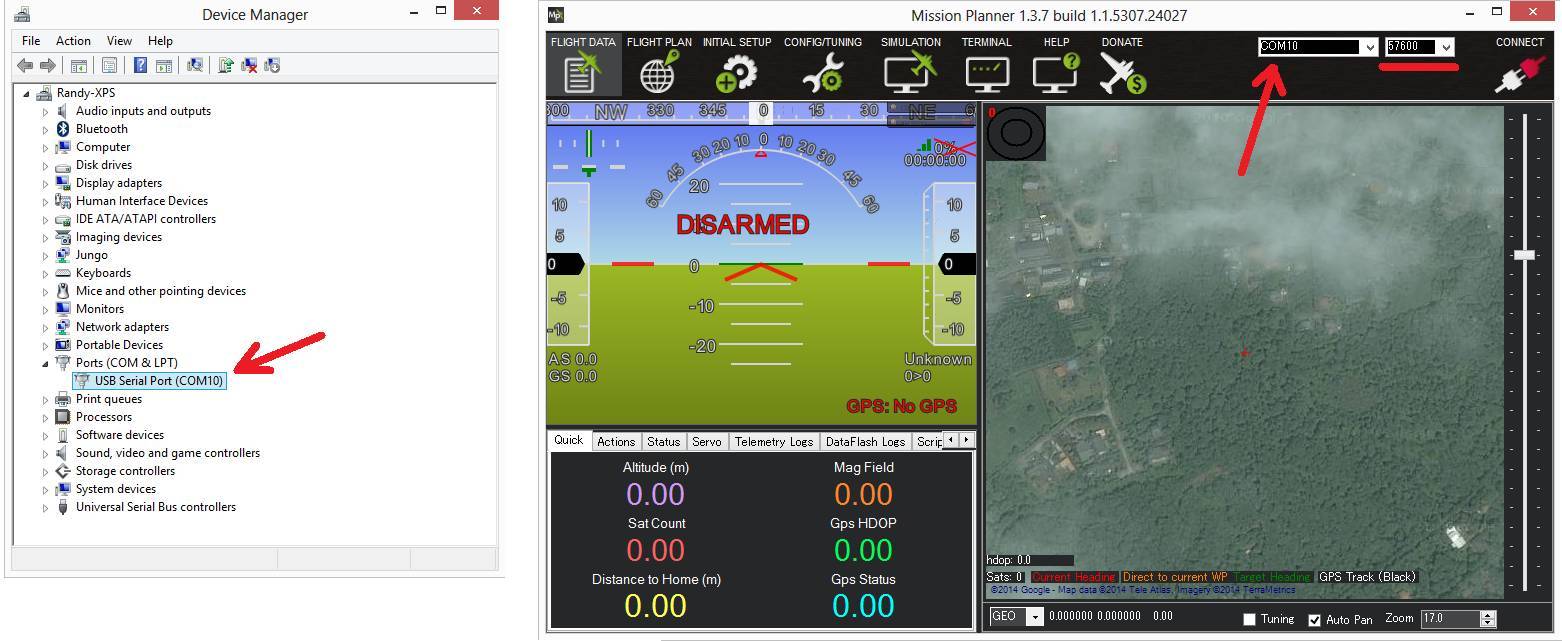
In terms of installing the firmware such as arducopter, you will just need to follow the same steps as you would for the Pixhawk/PX4 autopilot. Simply install mission planner and install the firmware onto the board, for full details please refer to the pixhawk wiki.
Autopilot Connectors
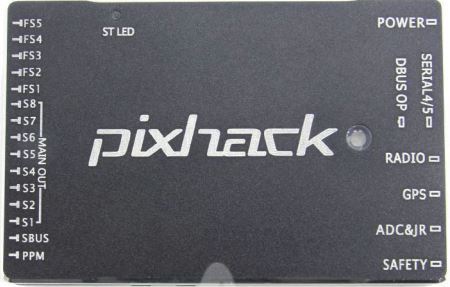
The main outputs S1-S8 correspond to pixhawk RC1-RC8 pins. The extra outputs FS1-FS5 correspond to pixhwak RC 9-RC13 outputs.
PPM- for SBUS inout
SBUS- for SBUS output
MAIN OUT- for main output ports S1-S8
FS1-FS5- for extension ports
POWER- for PM voltage and current module sensor. Do not connect the PM sensor to other port!
DBUS OP- for data extension including Telem 2 for MinimOSD
SERIAL4/5- for serial port 4/ 5
RADIO- telem 1 port to connect telemetry module
GPS- for GPS module and compass
ADC&JR- for ADC 3V3 output and JR transmitter input
SAFETY- for buzzer and safety switch
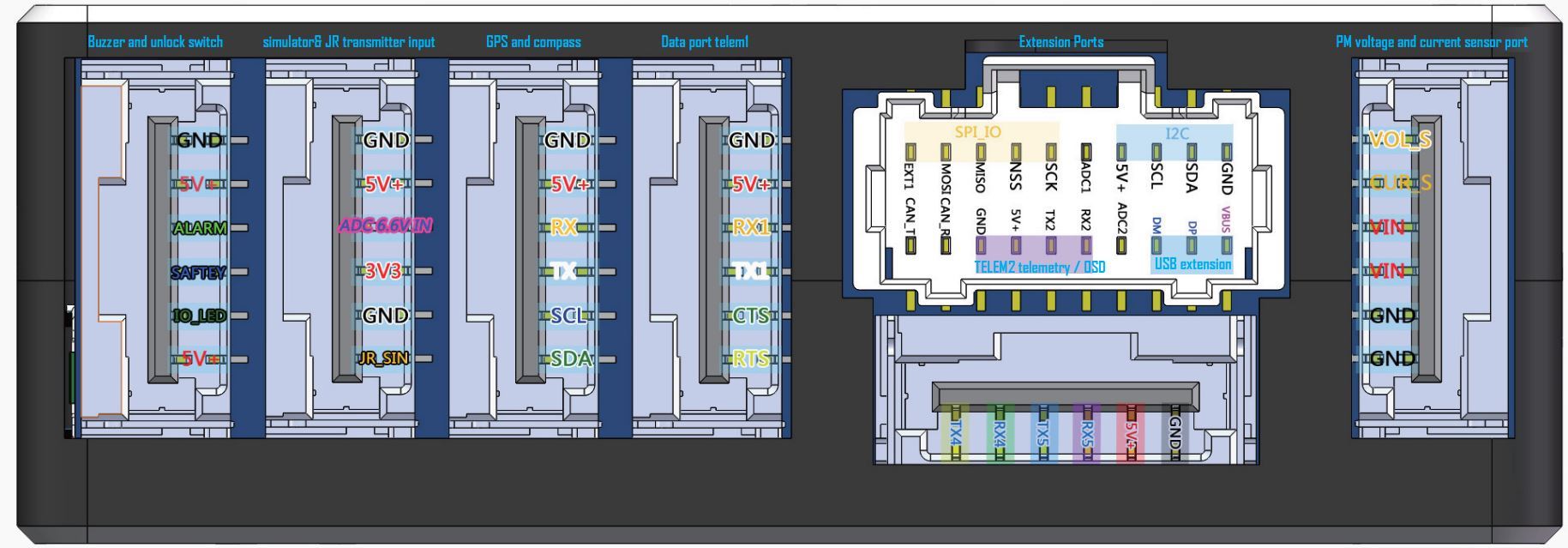
Here is the exact pinout of the interface connectors
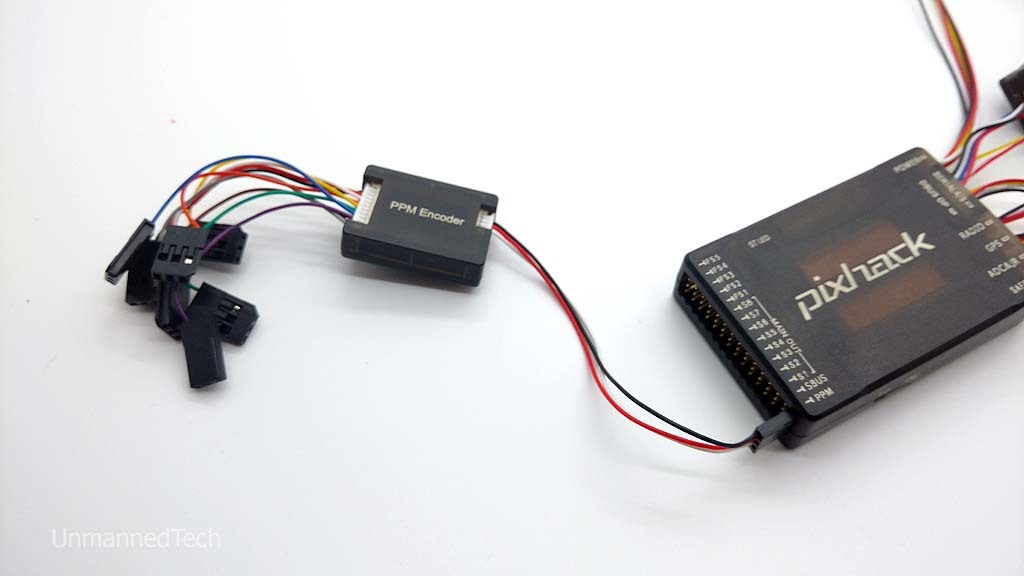
Connecting your receiver
Just like the original Pixhawk, you need to use a RC receiver that is able to output PPM/SBUS signals for the autopilot to read. Either way the pixhack reads teh PPM input from your receiver via the PPM port. Many users get confused between the SBUS and PPM ports on the board, the SBUS is purely used for output so you should always connect your receiver to the PPM port.
If you want to find out more about PPM, PWM check out our guide by searing the guides category for PWM and PPM
However if you are using a R/C receiver that only supports PWM, the Pixhack kit we sell also includes a PPM encoder that will convert each of the PWM channels to a single PPM signal that will be read by the autopilot as shown below. The PPM encoder supports a total of 8 PWM channels.
Start with the 3 pin servo cable for channel 1 on your Receiver which also provides power for your R/C receiver.
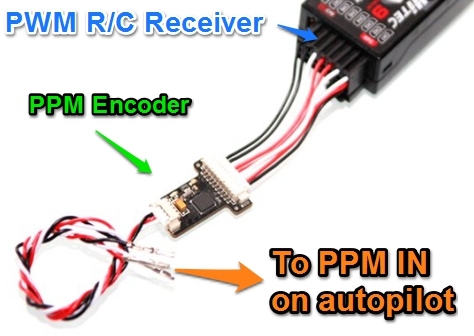
The PPM port on the pixhack provides 5V power for your receiver via the middle pin
Connecting MinimOSD
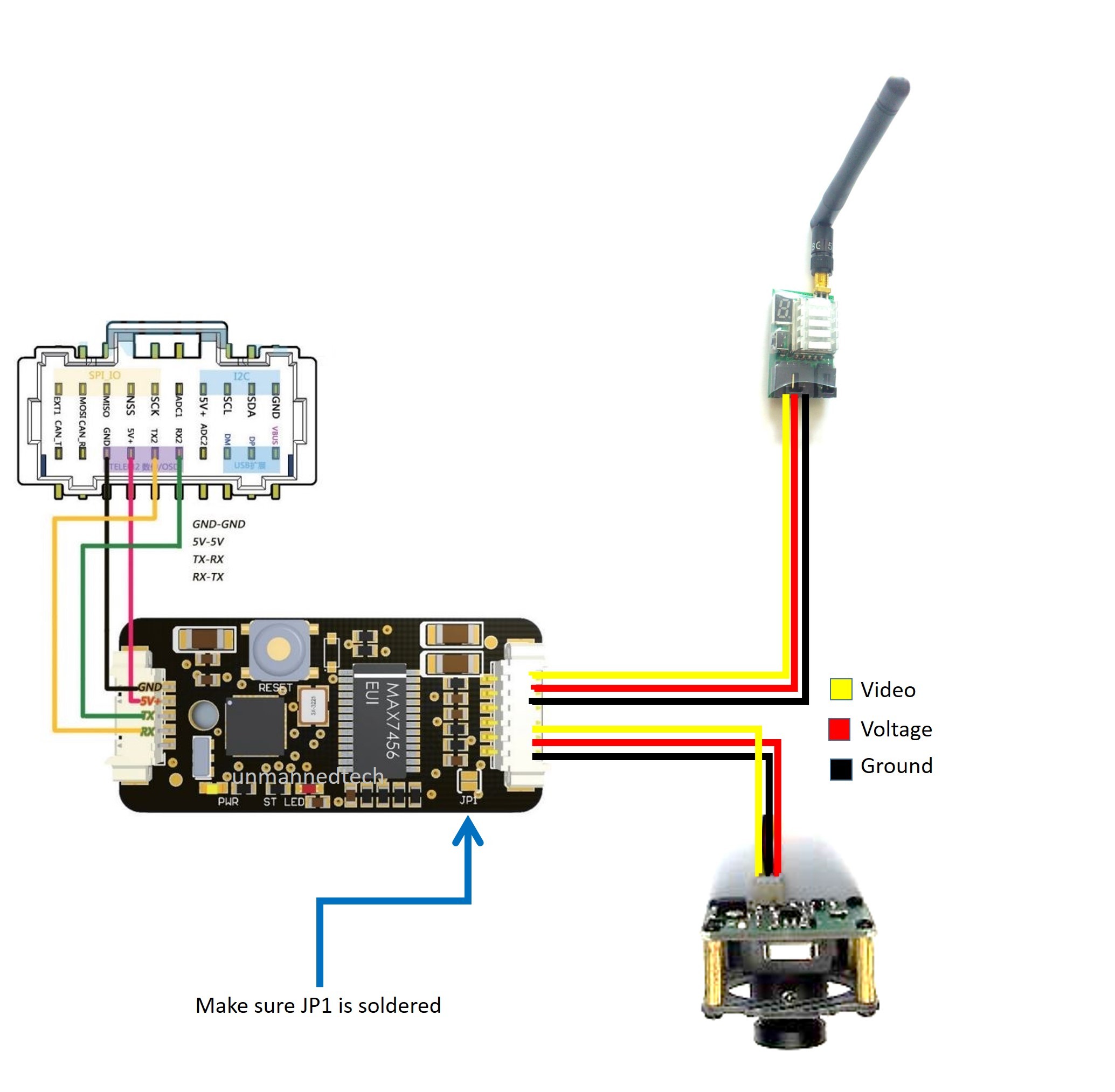
A minimOSD board is included with the Pixhack kit, and it allows you to to overlay useful information on top of your real time video feed. For more information on FPV, please read our FPV Guide You will simply need to connect the minimosd board to your FPV tranmitter/receiver according to the pinout as shown below. The minimOSD then connect to the Telem 2 port (DBUS connector) on the Pixhack.
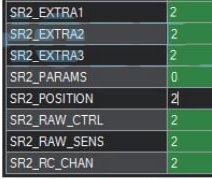
You will also need to change some settings within mission planner to enable the minimOSD board, To get here you will need to open mission planner, and go to the config>tuning tab, and view the full parameter list. You will need to change all the SR2_EXT parameters to 2.
Powering the output rail
The output rail on the autopilot is powered separately from the main pixhack (which is powered via the power rmodule). This does not really matter for most multorotor applications since ESC;s are powered via the PDB so the pixhack does not need to provide output power to the ESC’s. However if you want to use a servo you will need to power the output rail with a 5V BEC. In most fixed wing aircraft the ESC includes a BEC so you can use your ESC to power the entire output rail. Just be careful to ensure your BEC can provide enough current to power all of your servos.
Pixhack Schematic
Here is the schematic PDF for the pixhack autopilot should anyone need to know the inner workings for custom functions.
Pixhack-Schematic.pdf (600.1 KB)
If you have any questions or run into any problem in getting your pixhack up and running, please let us know by asking a question below.