Our Mini Unmanned Hawk Autopilot kit is a great alternative to the pixhawk autopilot as it has all the same outputs and features but comes in a smaller form factor. This is a guide reference guide to help you quickly get started. You can still refer to the original pixhawk wiki as the only differences is the port locations.
Mini Pix Port Locations
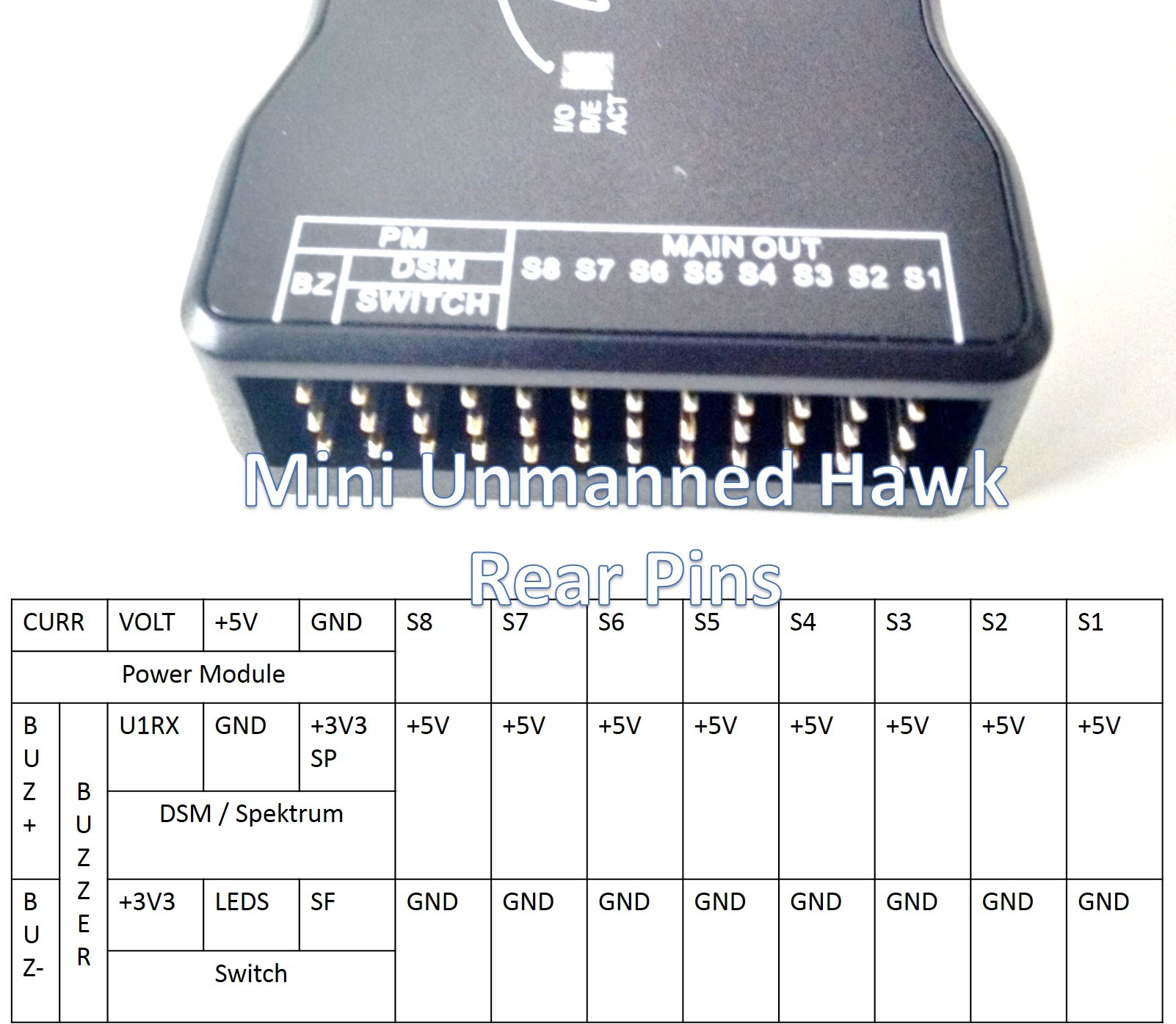
The two tables below show you the output and input pins on the mini unmanned hawk. As you can see this board has all the same number of connectors as the Pixhawk autopilot, but instead of being on the top of the pixhawk board, they are located on the front and rear.
Because of this you must take special care to make sure that you connect everything the right way around or you could damage your mini unmanned hawk board.
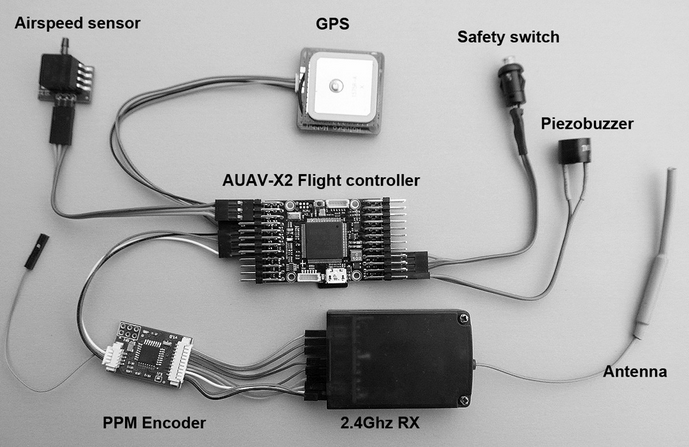
If you are using a regular PWM receiver that does not support PPM, you will need to use the included PPM encoder to convert the PWM signals to your mini unmanned hawk to PPM. However by default the PPM encoder does not pass through power from the pixhawk to your receiver so if you would like to power your receiver from the autopilot you will need to solder the SJ1 jumper as described in this post:
I just received my Pix Mini Kit and I’m not getting an PWM on the the AUX pins. I’m powering my servo w/5V from a bench power supply and connected the servo to the Pix Mini’s A3 pin (=AUX3 on a regular Pixhawk). When I toggle Servo 11 in Mission Planner ( which corresponds to pin A3) , I get no changes on the A3 pin. I’ve armed the Pix Mini via the “Arm” button in Mission Planner and actuated the Safety switch. Any idea what I’m doing wrong?
Does someone know right settings for power moduleon arduplane with this controller. I have new set and I can’t get readings from power module. Does i have wrong setting or power module broken.
What do you mean your power module is not working? Are you getting weird readings for voltage and current or no readings at all? Have you gone through to calibrate your power module? Details on how to calibrate your power moude can be seen here.
Otherwise where did you get yor pixhack kit from, as I know some Chinese sellers try save costs by only including the BEC on the power module so it does not have the capability to measure current or voltage, but only provides a constant 5V to power your pixhawk.
I got my Pix Mini in but zero instructions… I’ve figured out a bunch but can’t figure how to connect my dragonlink receiver to it… Which pins do I use for PPM?
PPM input goes to the RC-In pin on the front of the board. If you also need to connect thr viut and gnd pins to your reciever which are to the left of the RC in pin. You might need to use jumper wires as the sbus pin is between the RC-In and v out so you can’t use a standard 3 wire servo cable unfortunately
If you need a diagram let me know, cand do it now as I’m on my phone.
I learned that if you are using a dragonlink receiver via PPM and a RFD900 telemetry modem it doesn’t work… Both devices work just fine independently but not when both are connected to the Pix Mini at the same time, the dragonlink doesn’t work… Tried everything imaginable to get it to work… no go… (rolling back firmware, plugging each device in after boot up, setting up SiK radio, etc…)
I have an APM Pro which all work just fine together…
Hi, what dragonlink are you using is it the v2 or v3? As both should work, ppm should also work as that’s the only way to send RC signals to pixhawk. but my guess is its its a setting on your pixhawk, dragonlink maybe telemetry baud rate is set incorrectly for your dragonlink?
Not sure what you mean… as I mentioned, the dragonlink works when connected without the telemetry modem… Once I connect the modem, it doesn’t… tried both ports for telemetry… I am running v2 I believe… its the latest from their site…
On the APM Pro, both work together fine… Is there a setting on the Pixhawk I should pay attention to?
My question is why are you not using your dragonlink for telemetry as well as R/C control? However if you cant use both at the same time my feeling is that they are both drawing too much power from pixhawk… If you try to power your RFD900 telemetry and dragon link via a BEC you should then be able to use both as pixhawk has the capability of outputting telemtry at the same time as reading CPPM R/C signals…
I’ll give that a go… The APM Pro and a normal 3DR Pixhawk don’t have any issues powering them both… But I guess you got to give a little for the small size…
I use the Modem to send telemetry to Mission Planner… I’m thinking the Dragonlink only does that to the radio?
To be honest I have never used either as I use open LRS and never used RFD900 since 900mhz can’t be used here in UK. I did read before that you can get mission planner connection with dragonlink but I think that is with v3 via Bluetooth.
However if I works with pixhawk it will work with mini pixhawk as they are both based off the same base schematic, I would double check the connectors too.
That is exactly what was wrong… the Pix Mini didn’t have enough to power both the receiver and the telemetry modem… I did hook up a regular 3DR Pixhawk and all was fine… Guess for the small size had to give up a little… Will have to add a BEC to work the modem…