Hi, I just bought a pixhack and installed in on a F550 frame. I mounted it on the frame with four pads of kyosho zeal, expecting that the internal vibration dampener of the pixhack + the zeal would give me a perfect vibration-less drone.
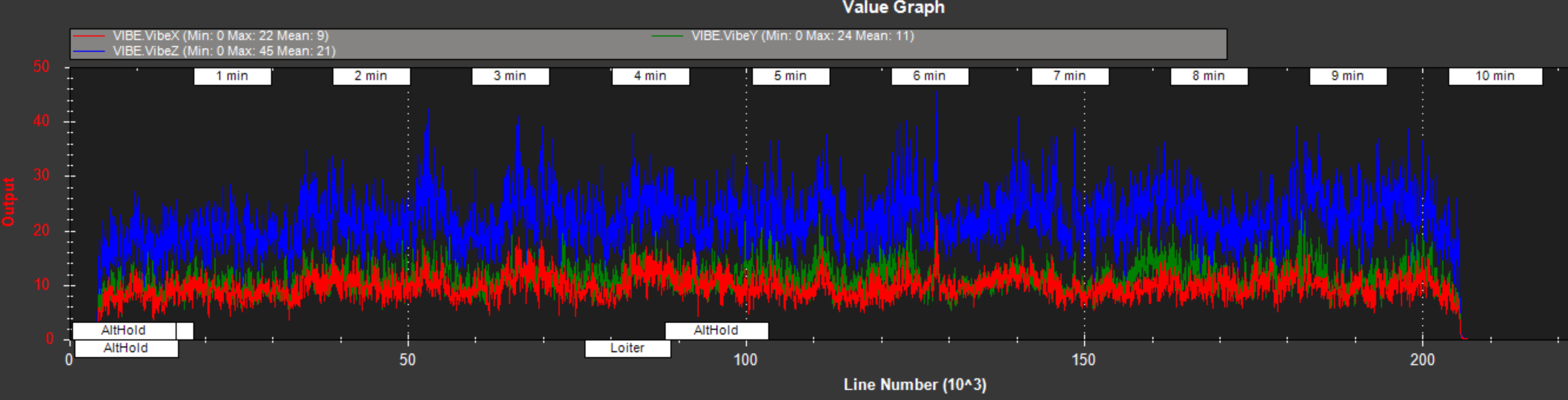
When looking at the log file, I see quite some vibration though:
Is this normal for the pixhack? The complete logfile is here
Greetings,
Steven
To start its probably worth mentioning that since arducopter 3.3 (arduplane 3.4) a new scale for vibration measurement was introduced. So before acceptable x/y vibrations where ± 3 and -5 to +15 for z axis. Now anything less than 30 should be fine. I see that in general your z axis is over 30, but the X and Y are fairly acceptable. TO be honest the Z axis is the hardest axis to minimised the vibrations, even things like vibration dampers, or foam dont do much for the Z axis, so the main way to minimise that is to ensure your motors and propellers are properly balanced. What motors and props are you using?
Have you tried to fly your F550 yet? A couple months back I had some problems with my Z axis vibrations (due to very out of balance props) and the main affect was that it has very poor altitude hold ability, but I cant recall what my VibeZ readings where. But in your graph the average is 21, with an occasional max of 45 which should not cause much issues as its within the recommendations.
Hi Alex, thanks for your fast response, I use the DJI E305 motor\etc combo with the standard dji props.
I’ll check the balance of the motors and props to see how they are.
I also have issues with alt hold, the drone will sometimes go up and down about 50cm-1meter suddenly, seemingly without any reason. I’m using an SF11 rangefinder and I’m looking for a perfect steady alt hold, but no luck yet.
DJI gear is usually quite good but hopefully that’s the cause of the problems, but the z axis vibrations are likely the cause of the poor alt hold you are experiencing. Let me know how you get on 
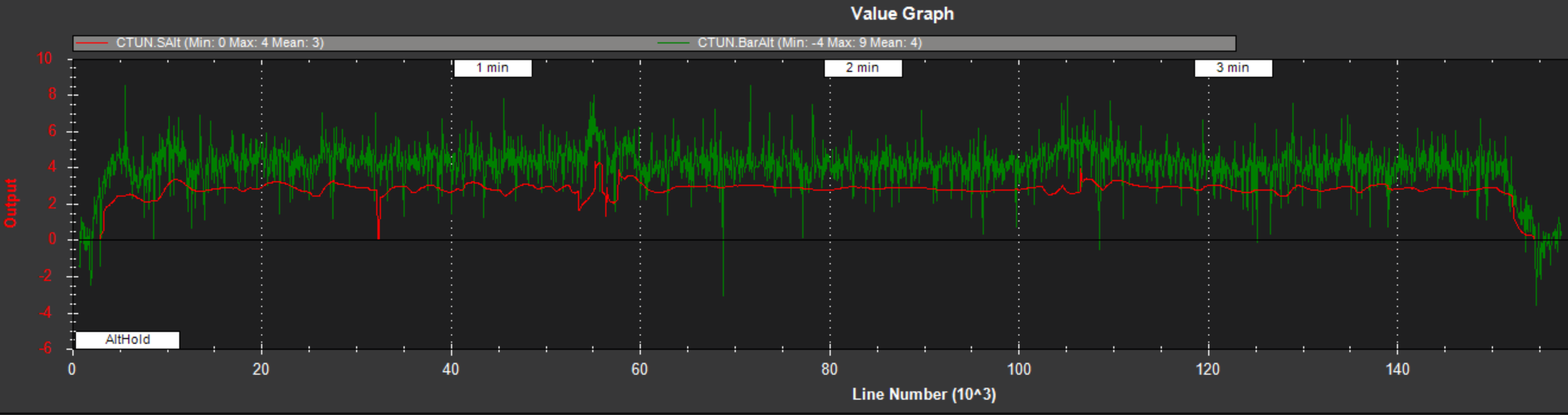
Hi, I’ve done some additional testing, and a strange thing I notice is that the pixhack barometer data is very noisy. See graph below, the red line is the laser, the green the the barometer:
Compare this to the barometer data from my previous banggood pixhawk clone:
Is there something I can tune to lower the barometer noise?
Greetings,
Steven
The log files from both flights are here:
pixhack flight: 1 31-5-2016 17-02-00.bin
pixhawk clone flight: 2016-04-22 16-50-50.bin
Hmm that is rather noisy compared to your previous pixhawk. Are you able to run a quick test on the ground to see if the baro is just as noisy? Also are you able to double check if there is any foam ontop of the baro, as that also reduces the noise. I don’t have one at this moment to compare.
As for the parametrrs you can try alter the weights on the EKF but I would not mess around this that untill we double check the baro is normal.
Parameters to play with for alt hold include:
PE_ACC_PNOISE (accel noise)
PE_POSD_NOISE (barometer noise)
PE_VELD_NOISE (GPS Down Velocity)
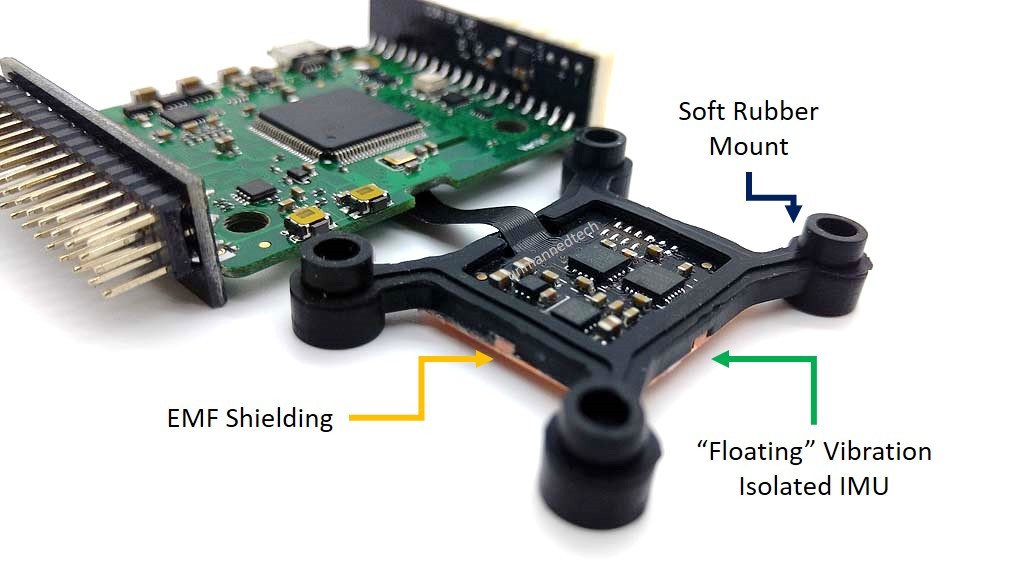
Ok I will do a ground test. Where should the foam be mounted? I.e. if I look at this picture?
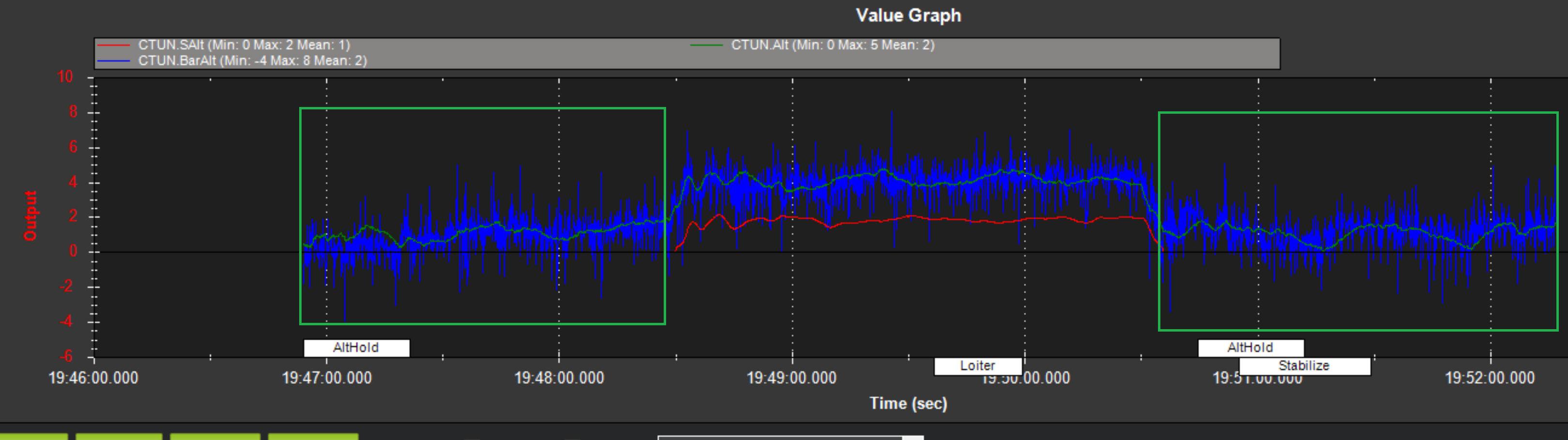
Hi, here are the results of the ground test.
I did the following:
a) Minute 1: Arm the copter in Alt Hold and give just enough throttle so the copter doesn’t disarm but doesn’t go in the air either;
b) Minute 2: Take off and hover in Alt Hold @ 2 meter;
c) Minute 3: Hover in Loiter @ 2 meter;
d) Minute 4: Land a keep the motors spinning in stabilize .
So, in minute 1 and minute 4 the copter is standing stationary on the ground. These timeslots are marked in the green boxes in the log graph:
(the red line in the middle is my SF11 laser rangefinder - the complete log file is here).
So, the baro is very noisy at all times, it doesn’t matter whether the copter is on the ground or not.
Any ideas on how to fix this?
Greetings,
Steven
Thanks for that, and it does not look too promising so you might need to return the pixhawk back for replacement (assuming you purchased from us) 
I have passed this into our engineer at the factory just to confirm but it does look like there might be an issue, I will let you know as soon as possible.
Hi Alex, ok thanks. Yep I ordered it with you, order nr 20178.
Hi Alex, got any info from your engineer already?
Greetings,
Steven
Sorry about the delays, he suggested that some noise could be caused by the power module not providing a clean voltage supply to your board. Are you able to test with another power module? Possibly the on from your regular pixhawk?
Ok, that’s going to take some soldering but I will try. I will let you know the results asap.