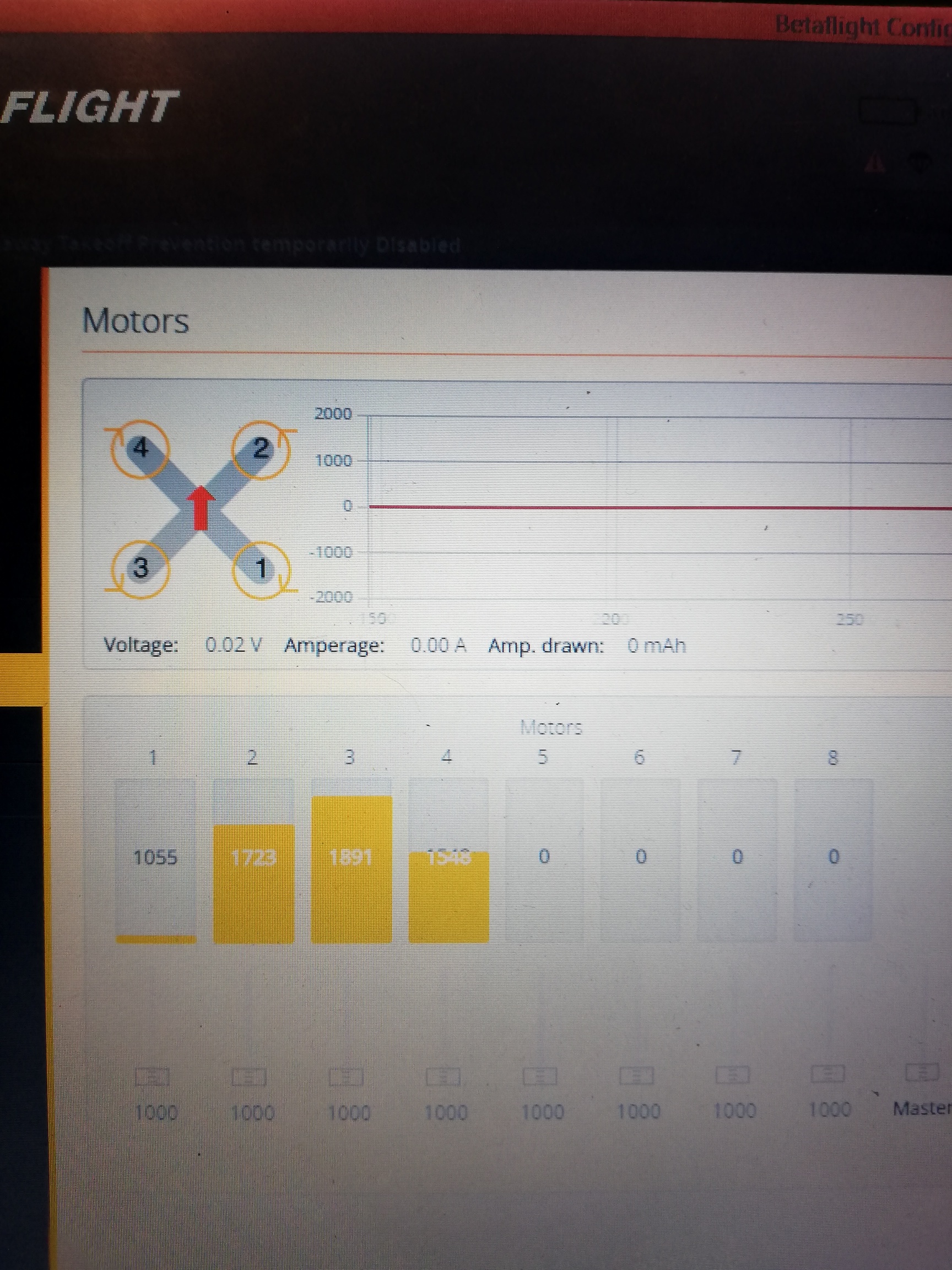
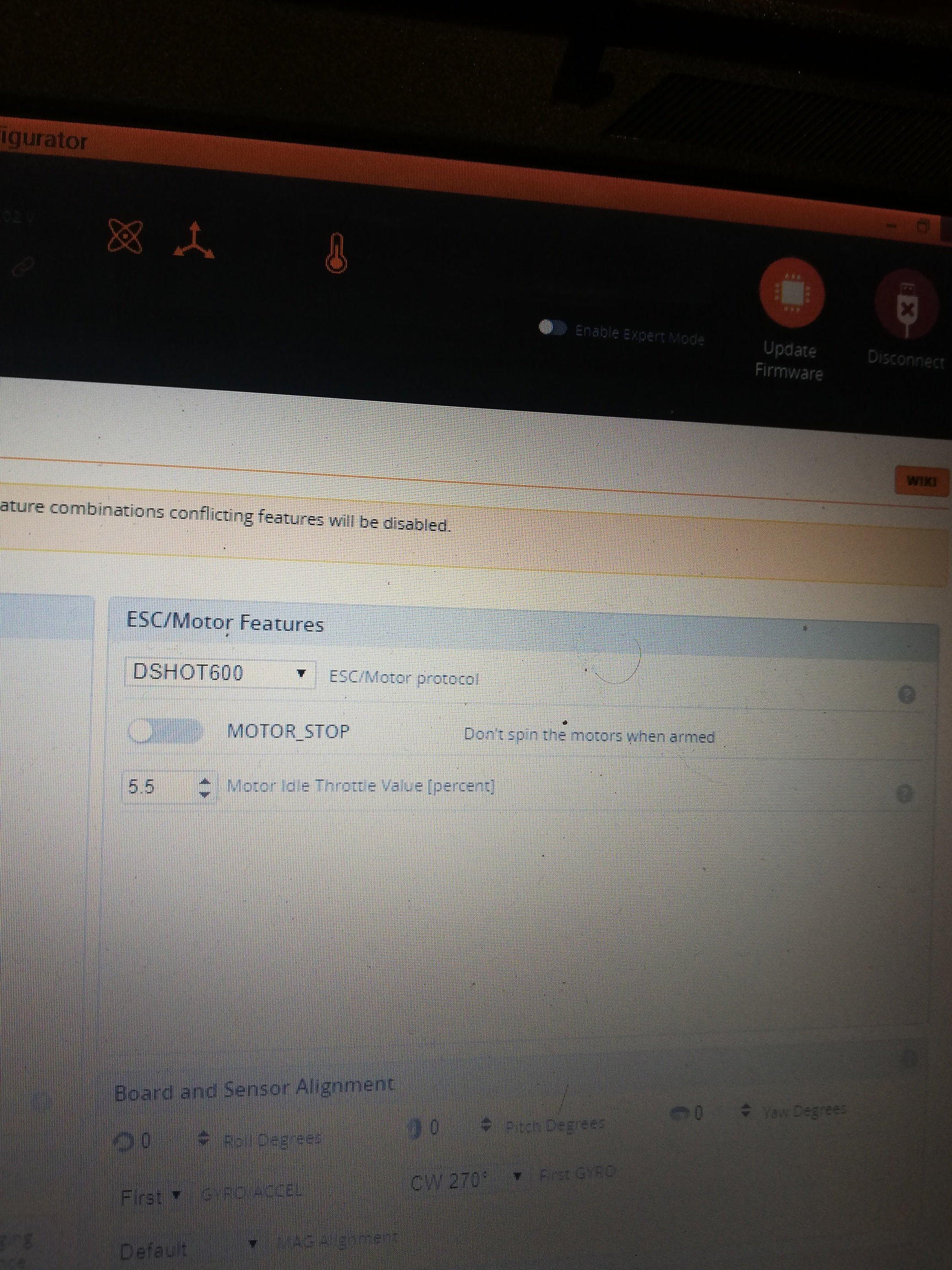
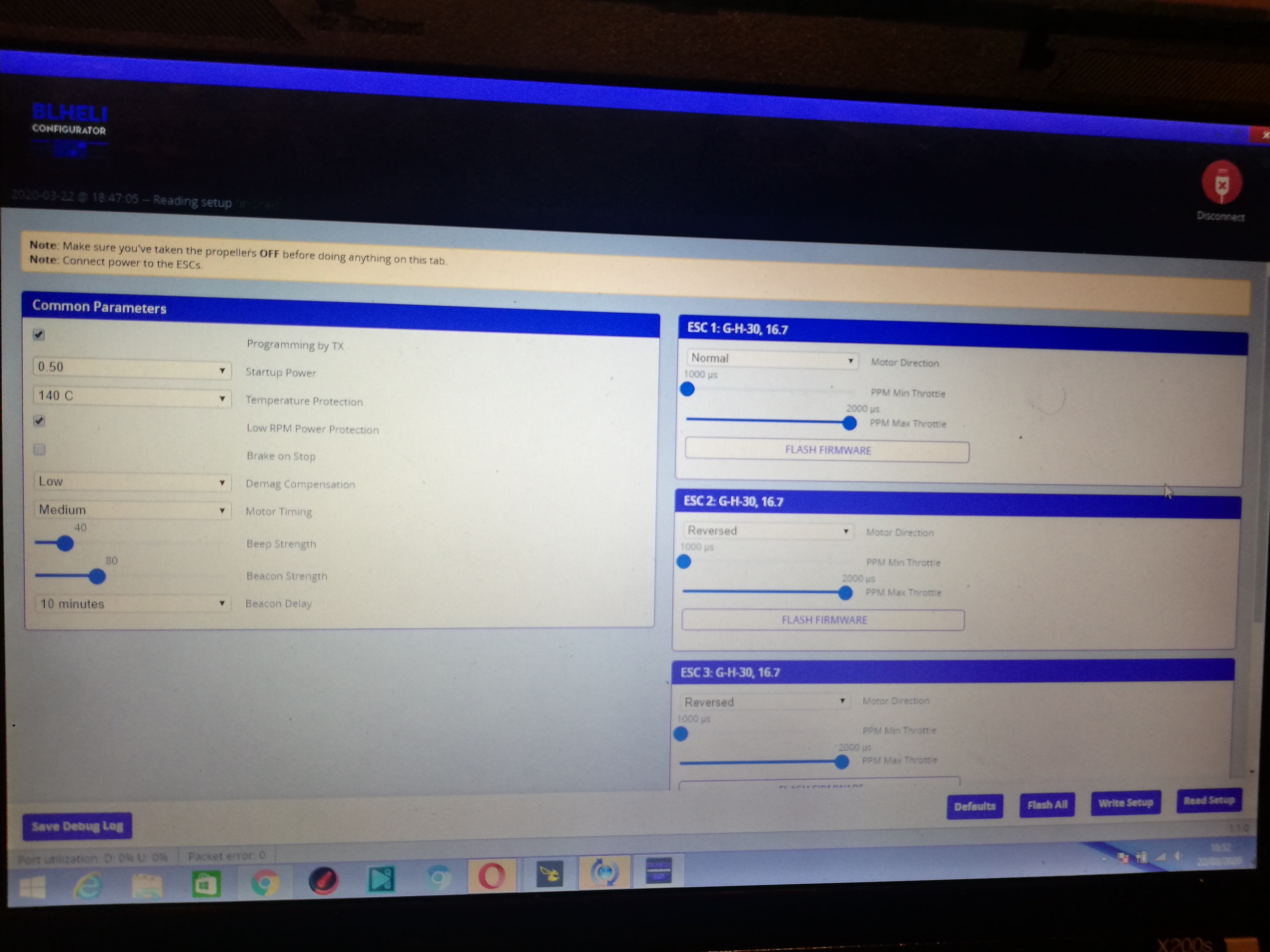
Hi Everyone, I’m having a small issue and need help. I decided to completely upgrade my x220 so changed everything. I’m running a holybro kakute f7 FC and also a 4in1 30a turnigy 2-6s multistar esc. now my issue is that the drone will hover and handle fine in the sky but when I give it a punch it just flips always towards right and fall out of the sky i have tried calibrating the esc threw betaflight and no help and really can’t find any more info on what to do. Pictures are attached of my settings in betaflight and bheli. Thanks you

Are you using Default PIDs?
Hiya, yes. I will post more clear pics later of my settings.
first thing to do is black box a flight where it flips, if it flips to the right and you can see in black box that the flight controller is trying to give max throttle on the right side motors its not your pids its esc or motors.
looking at your pics ive never had calibrated esc looking like yours never had them all same eg 1000-2000
1 Like
Thank you I will try that today and keep youse updated.
UPDATE: day 5 still no luck. I’m beginning to lose hope lol. Flashed esc and fc and tx, still same issue. I’m beginning to suspect it could be the esc or maybe even motors but I’m confused because if it flown in angle mode and steady it will not flip unless your throttling it.
did black box help or are you still using trail and error, black box is very good to eliminate things. if you think its motors just swap left to right and see what happens. do all your esc report 1000 min and 2000 max after calibration seems strange to me
Trial and error to be honest I’m still new to this hobby so blackbox looks too complicated for me. I defaulted the ecs too and now it comes up 1440 to 1880 roughly and still same issue, I’ve 2 more sets of motors so I will try them later. I will keep you update thank you for trying to help me out getting back flying
ESC calibration (min/max throttle) is only used for PPM. If you’re using DSHOT it’s ignored. Maybe a demagnetized motor?