Hi Guys
I am a complete newbie so forgive me if this doesn’t make sense.
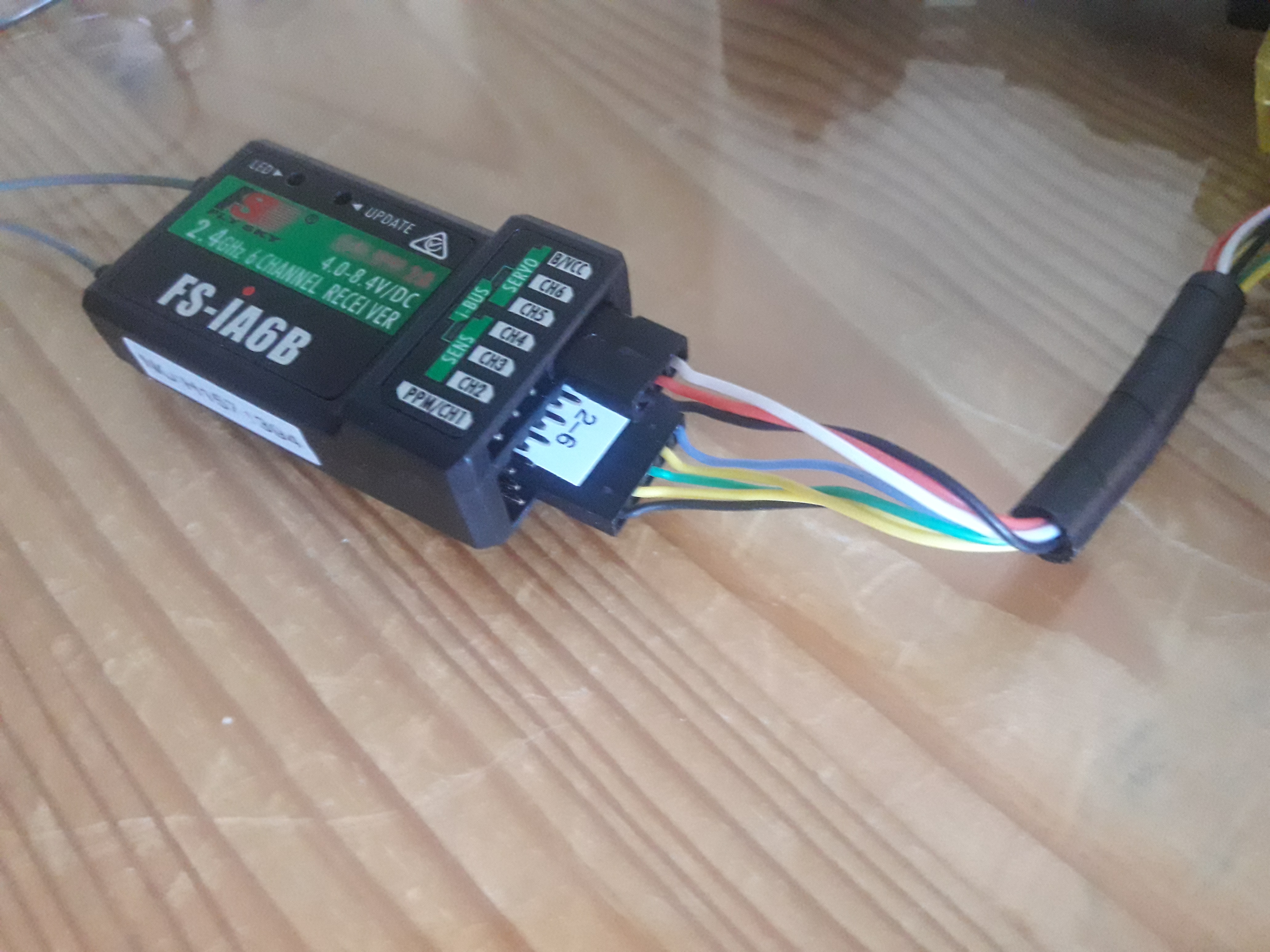
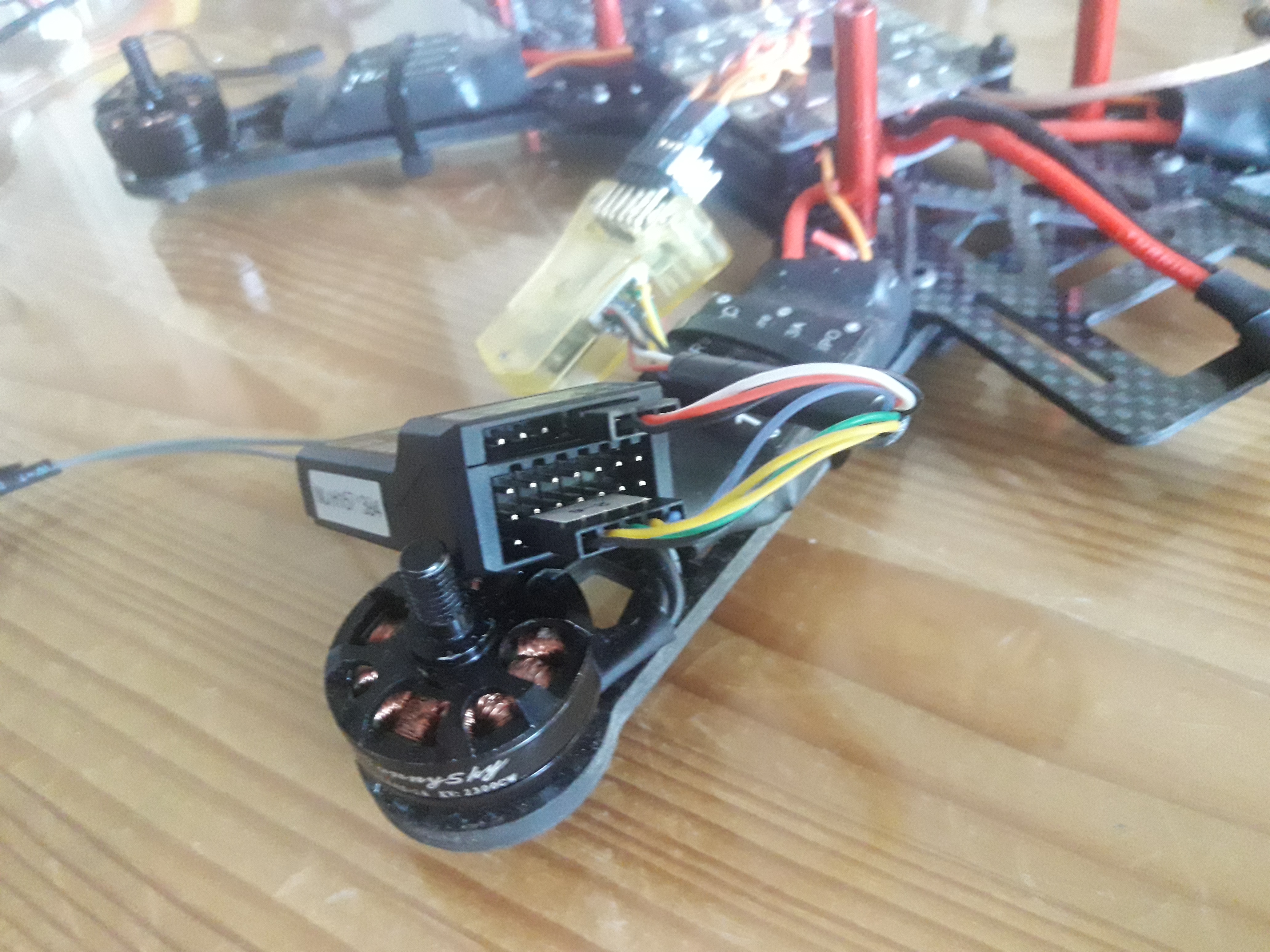
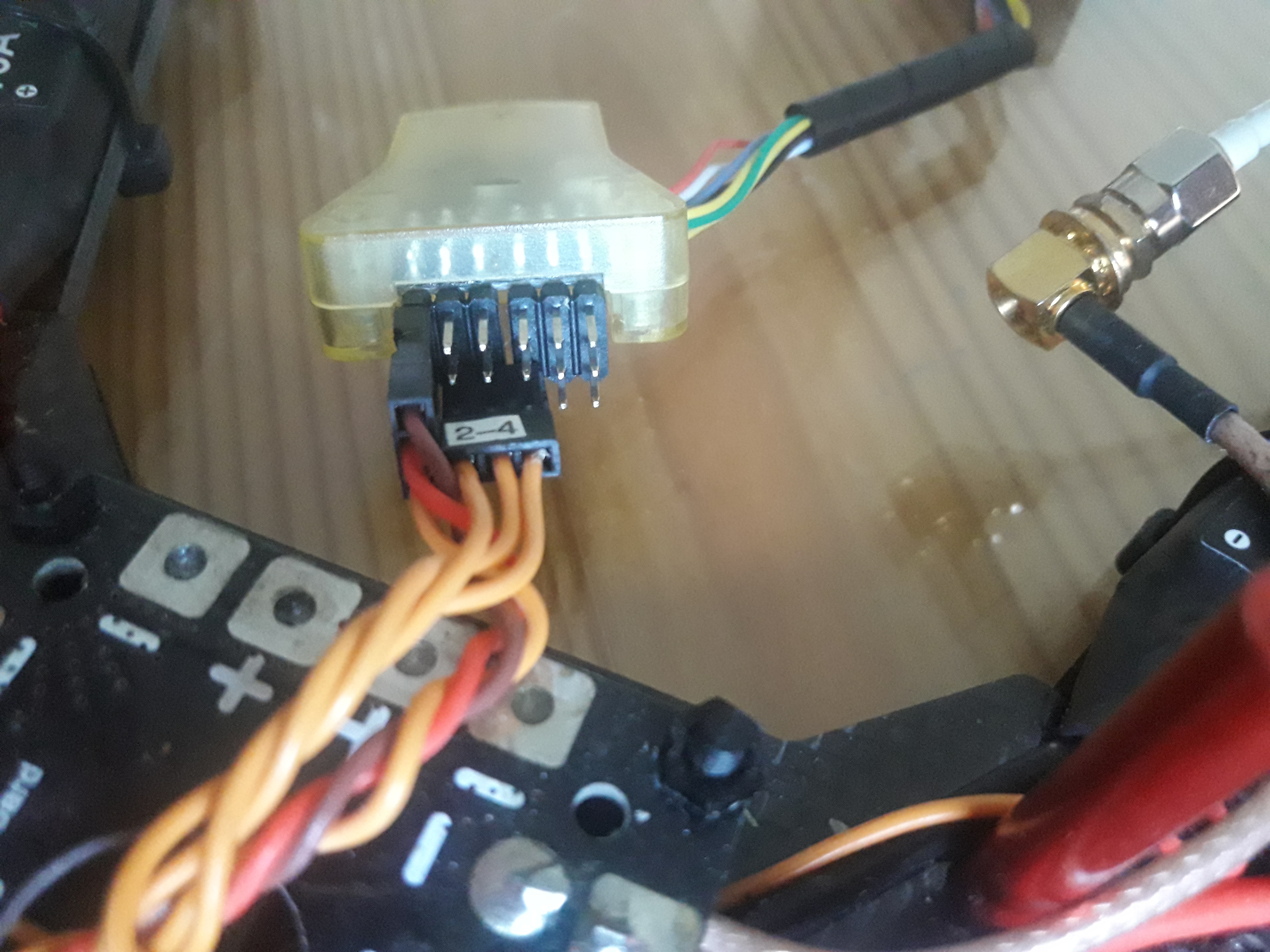
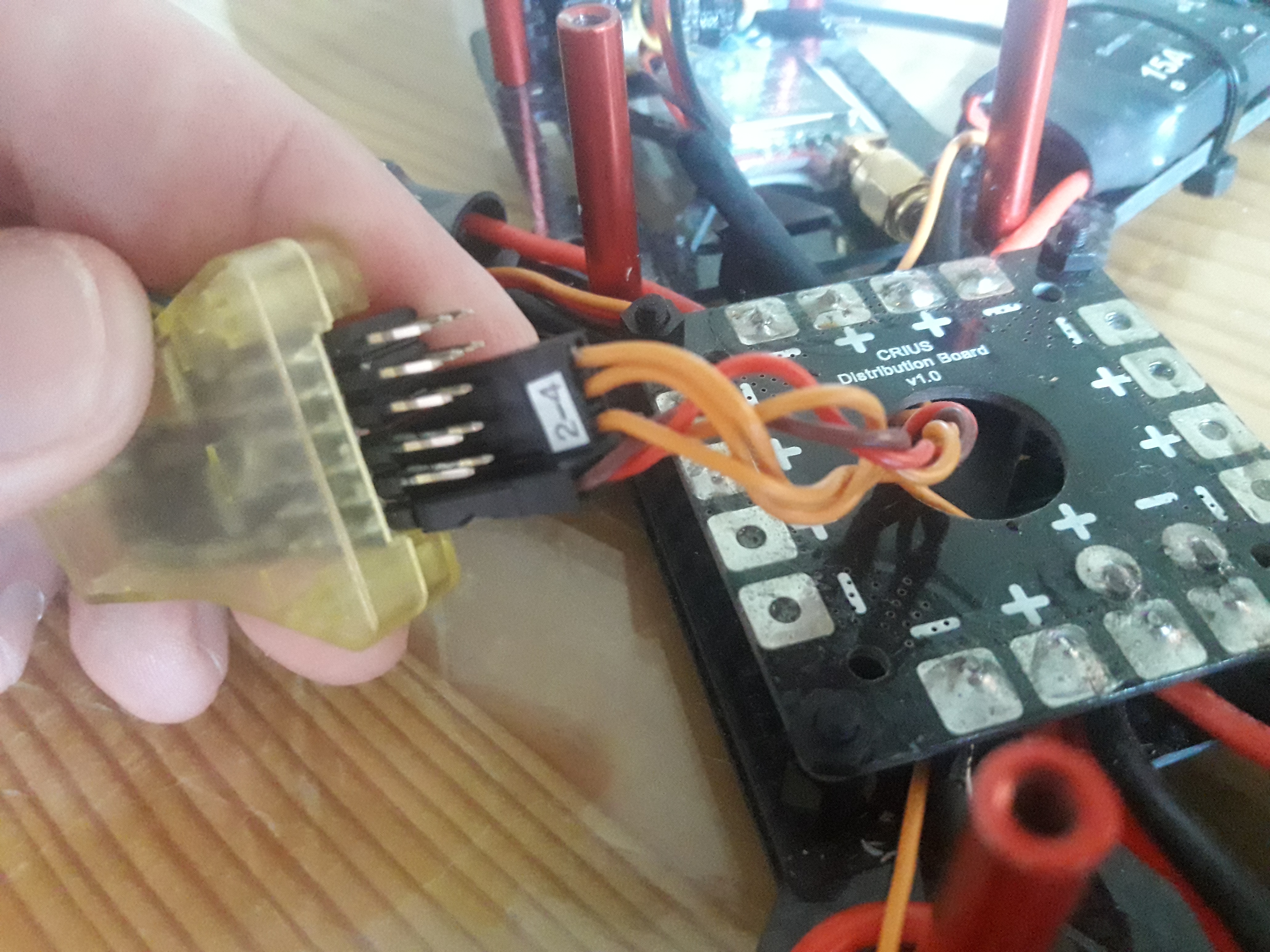
I have a QAV 310 frame, Crius multi rota distribution board, 4 x Sunnysky 2300 motors, CC3D Atom flight controller, FS-IA6B receiver and a FS-16X transmitter and im using Librepilot GCS to set this up with.
Using Librepilot i have managed to go through the quad setup wizard, I have used the following options within the setup.
First as requested i did a firmware update, next shows me the following board Openpilot Coptercontrol 3D. Next gives me a choice of Input Signal Configuration, i choose Flysky IBus. next is vehicle type, i choose multirotor, next asks for multirotor configuration, i choose Qaudcopter X, next asks for output signal configuration, i choose rapid ESC. next is configuration summary, Librepilot shows this.
Controller type: OpenPilot CopterControl 3D
Vehicle type: Multirotor
Vehicle sub type: Quadcopter X
Input type: FlySky IBus
Speed Controller (ESC) type: Synched ESC
Next i do a sensor calibration and then go through the ESC calibration procedure, i hear the calibration beeps when i start and stop this test. next is the output calibration, all motors run correctly. next is initial tuning, as my quad is not on this list i choose Generic Quad X and save all settings.
Im then asked by Librepilot to go through the Transmitter setup, I have binded my FS-16X to my FS-IA6B already. on the first screen there is no receiver activity, on the second screen i choose Acro, normal transmitter, on the third screen i choose mode 2, throttle and rudder on left, on the forth screen im asked to move the left hand stick up and down, librepilot does not recognize me doing this, it does not see the stick moving, I have tried to power up the motors via my transmitter, it does not do anything.
I am able to control my Quad through librepilot but have no control of the Quad using the transmitter.
Any help will be greatly appreciated.
Barry