The Flip32+ is one of the better quadcopter controller boards as it uses a 32bit controller with some great software, and its also rather small. This board uses the baseflight software which is gives this controller excellent performance right out of the box. Overall this is probably the best controller board for your miniquad. Below are some links to various manuals and also some great instructional videos.
In order to configure your Flip32 board you will need to install google chrome browser as the configuration software only runs on google chrome.
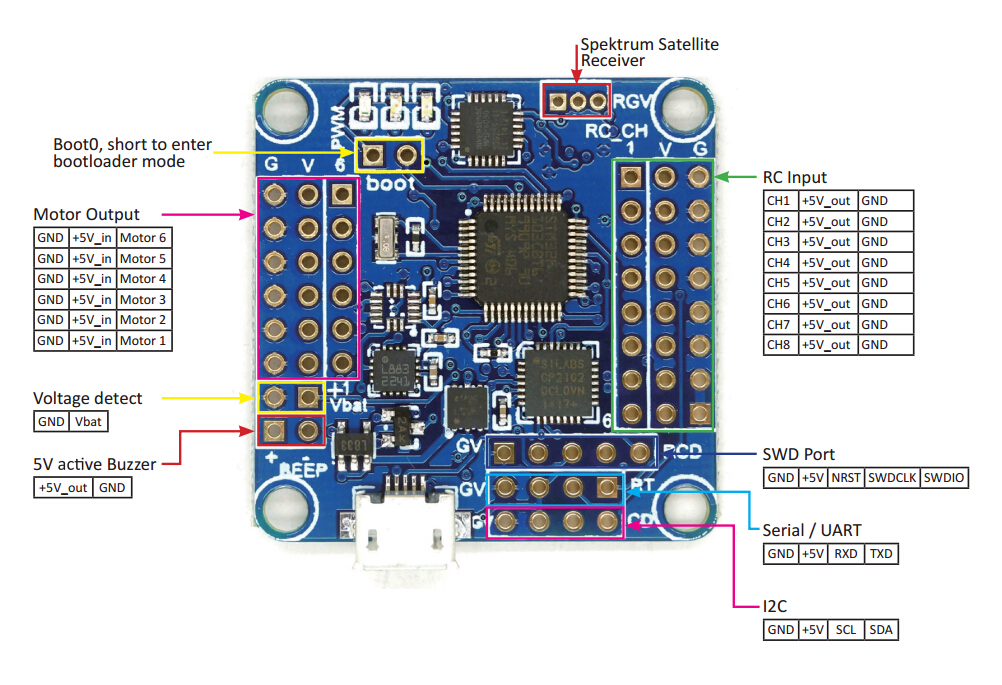
Flip 32 Board Connector Overview
Flip32 Board Versions
The Flip32 board comes in two versions, a regular Flip32 board, and a more expensive Flip32+ board.. Depending where you buy them they may use various names for the two The only difference between the two versions is the fact that the more expensive board has two added sensors, a compass (magnotometer) and a pressure sensor (barometer). Other than that both boards are exactly the same in terms of other inputs and outputs. If you are unsure about what version to get, I would personally say the more expensive board is better as it allows for you to add extra things to your system later on such as GPS, and the pressure sensor means you can use the altitude hold function. That said both these sensors are not super important if you are planning to build a little FPV racing quadcopter, but overall there is not a high price difference between the fun fly and full versions in the case of the flip32 boards..
Flip32 Drivers
You can download the drivers for the Flip32 board here from silabs, there is also a link to do this from within the configuration tool
Firmware
Being an open source project there are a some variations of software to choose from. The most popular version is baseflight but there has also recently been a fork called cleanflight which has the aim of using modern software practices to make the code easier to read/maintain and add new features. Fundamentaly both these firmwares are the same so feel free to try both and see which you prefer! I tend to prefer cleanflight firmware and it also has great up to date documentation.
Firmware Update
For more information on updating the firmware on your Flip32+ please see the post below. If you try to connect to your board but get an error message saying:
No configuration received within 10 seconds, communication failed
Then its most likely that you don’t have any firmware (or the correct version) on the board, so you will need to update the firmware.
Flip32+ Manual
There is no official manual for the flip32 board, however this post tries to cover some of the main topics that you will encounter with this flight controller. Since the best software to run on this flight controller is the cleanflight software the details on how to use the software do not depend on the actual hardware you are running it on. The only fundamental thing that is different between the flip32 and the naze 32 is the hardware layout.
However if you are looking for a more advanced manual you can also have a look at the naze32 manual (which is a board very similar to the flip32 but just with a slightly different board layout. naze32.pdf (1013.9 KB)
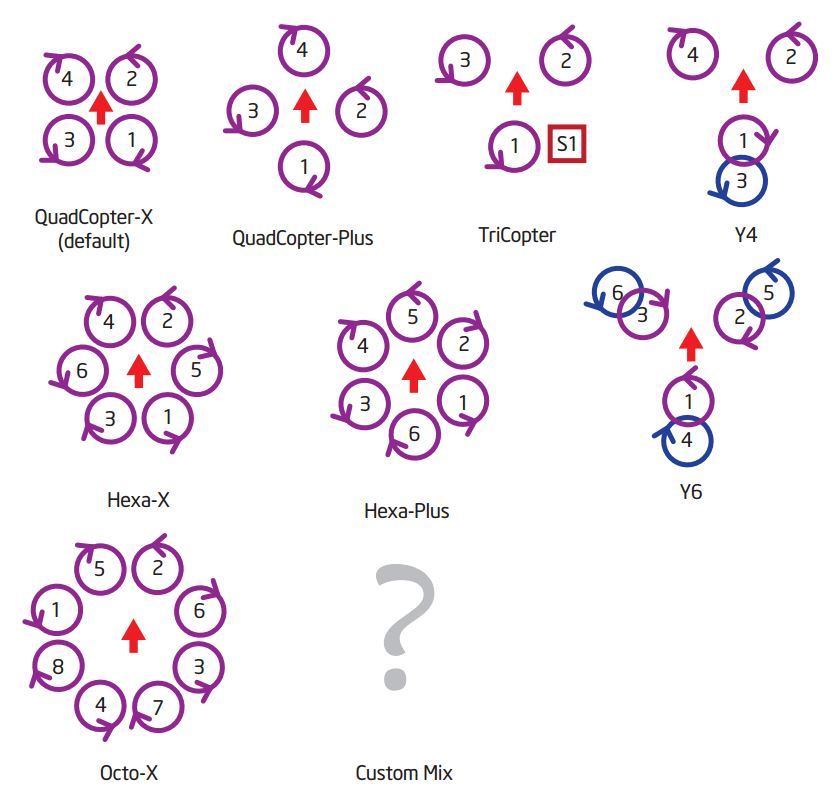
Flip32+ Motor Connection Order
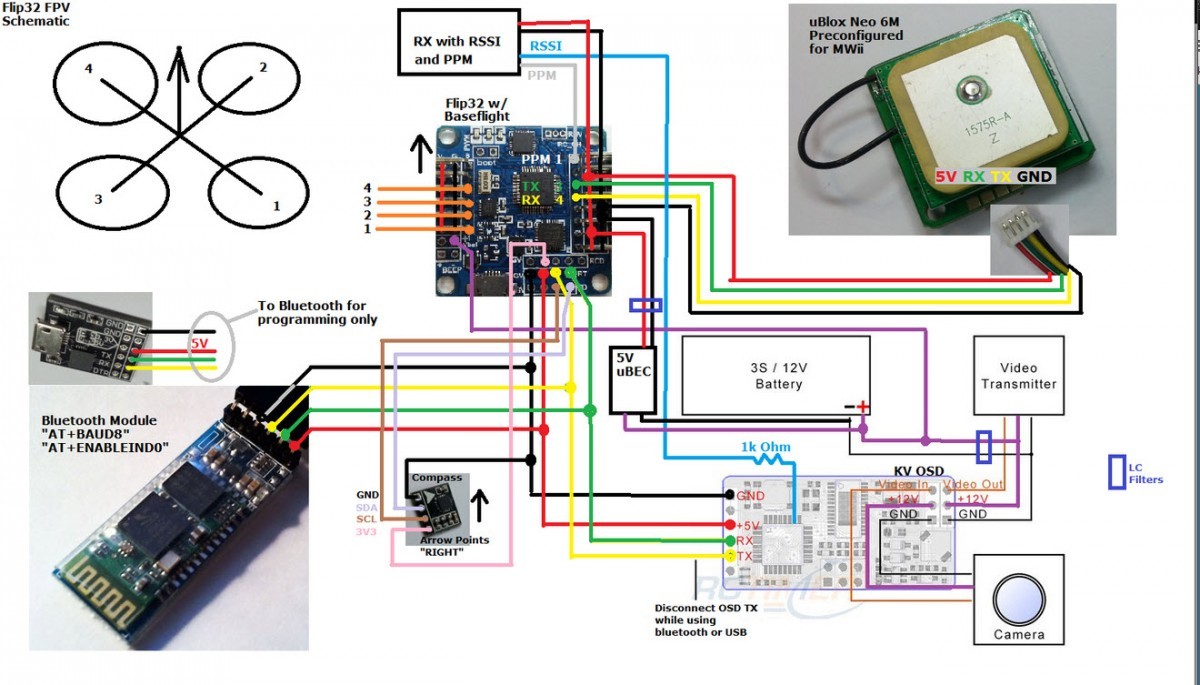
How to connect everything to your flip32
This image might seem complicated at first, but it provides great detail on how you would go about connecting all the possible accessories to your flight control board, such as GPS, OSD, Bluetooth and your FPV gear.
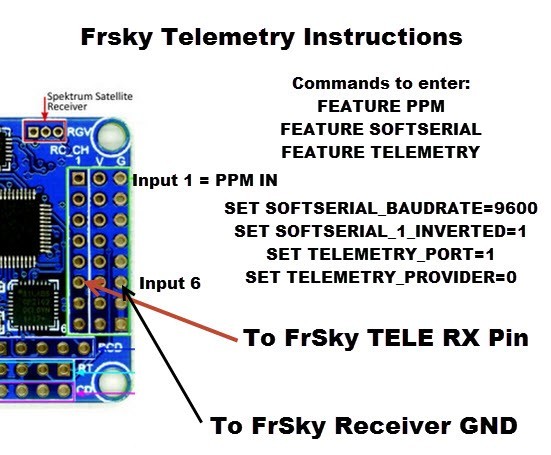
Connecting FRsky Telemetry to your Flip32 board.
If you are using a FRsky R/C system with the flip32, its a great idea to enable telemetry via the softserial port which allows you to receive some infomration in real time from the flight controller on your Taranis radio. For more information please read our guide on how to connect Frsky Telemetry to your cleanflight flight controller.
Flip32+ Video Tutorials
The videos below show a complete walkthrough of how to setup and configure your flip32+ flight controller.
The first video simply goes over the board and talks abit about the various pins and features.

This video shows you how to install google chrome and the baseflight configuration tool. If you already know how to install this then you can skip this video

This video shows you how to install the driver of the flip32+ and also how to install the firmware onto your flight controller board.

This video shows you how to connect your flip32+ board to your receiver and also goes over some of the initial configuration settings to enable you to use your controller with a quadcopter

The final video goes through some more configuration settings such as flight modes and other various settings.

This videos goes over the motor spin direction and also the ESC calibration with your Flip32 flight controller.


This video shows you how to connect and setup a bluetoooth module for your flight controller. This video also goes over the details on how to setup and configure a bluetooth module for use with the flip32+.