This is a quick and simple guide for beginners in this field on how motors are connected to ESCs (electronic speed controllers) correctly.
Firstly, on most multi-rotor platforms, you have an equal number of clockwise (CW) spinning motors and counter-clockwise spinning (CCW) motors; these two motors need to be connected to their respective ESCs differently.
As a note, you generally need a equal number of CW and CCW motors to enable the platform to yaw (turn side to side).
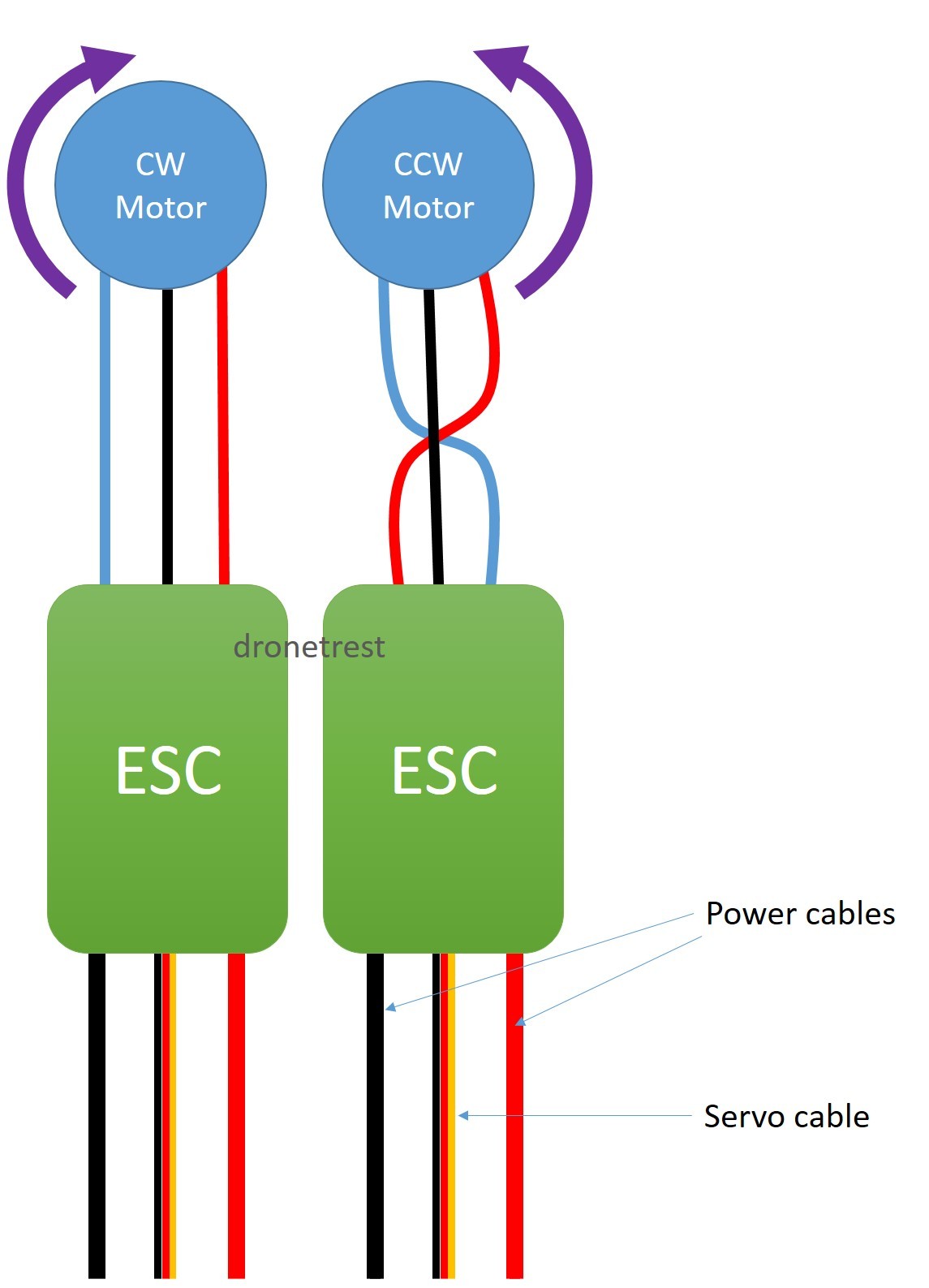
You can see the correct connection in the diagram above. For the CW motors, the cable connection between the two components is intuitive, the left goes to the left, the middle to middle, and the right to the right.
When connecting the CCW motor on the other hand, you must be careful to switch things up a bit. You see in the diagram that the left-hand cable on the ESC must attach to the right-hand cable on the motor. Equally, the right-hand cable on the ESC must connect to the left-hand cable on the motor. The middle cable is left and this simply connect to the middle cable of the motor.
These different connections are essential for making the motors spin in the correct orientation and therefore essential to getting your multi-rotor platform in the air.
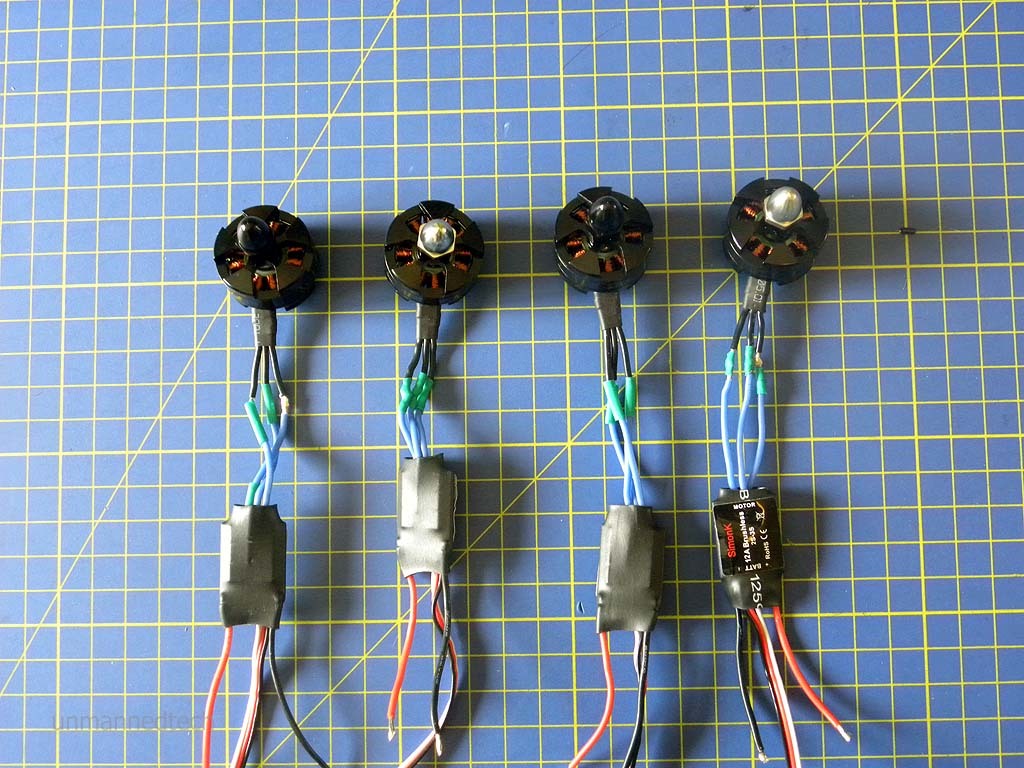
Below is an example of some ESCs connected to CW and CCW motors.
Check motor spin direction with a servo tester
A quick and easy way to test if your motor is spinning the direction you want, the best thing to do is to connect your ESC to a battery and a servo tester. A servo tester sends PWM commands to the ESC to emulate a flight controller or R/C controller. An example of this is shown below:

My motor is spinning the wrong way
If you have finished building your drone and find that one of your motors is spinning the wrong way, this will be because you have connected the wires the wrong way around. An easy fix would be to simply swap the two outer wires. There’s no need to worry, as with brushless motors, there is no wrong way to connect the motor to ESC wires as there are no positive or negative wires. If you want to find out why, check out our Brushless Motor Guide and also our How an ESC Works (coming soon) guide.
If you have any questions just ask them below