This is a quickstart guide to help you get started with the openpilot CC3D Revolution flight controller.
The Revolution Board
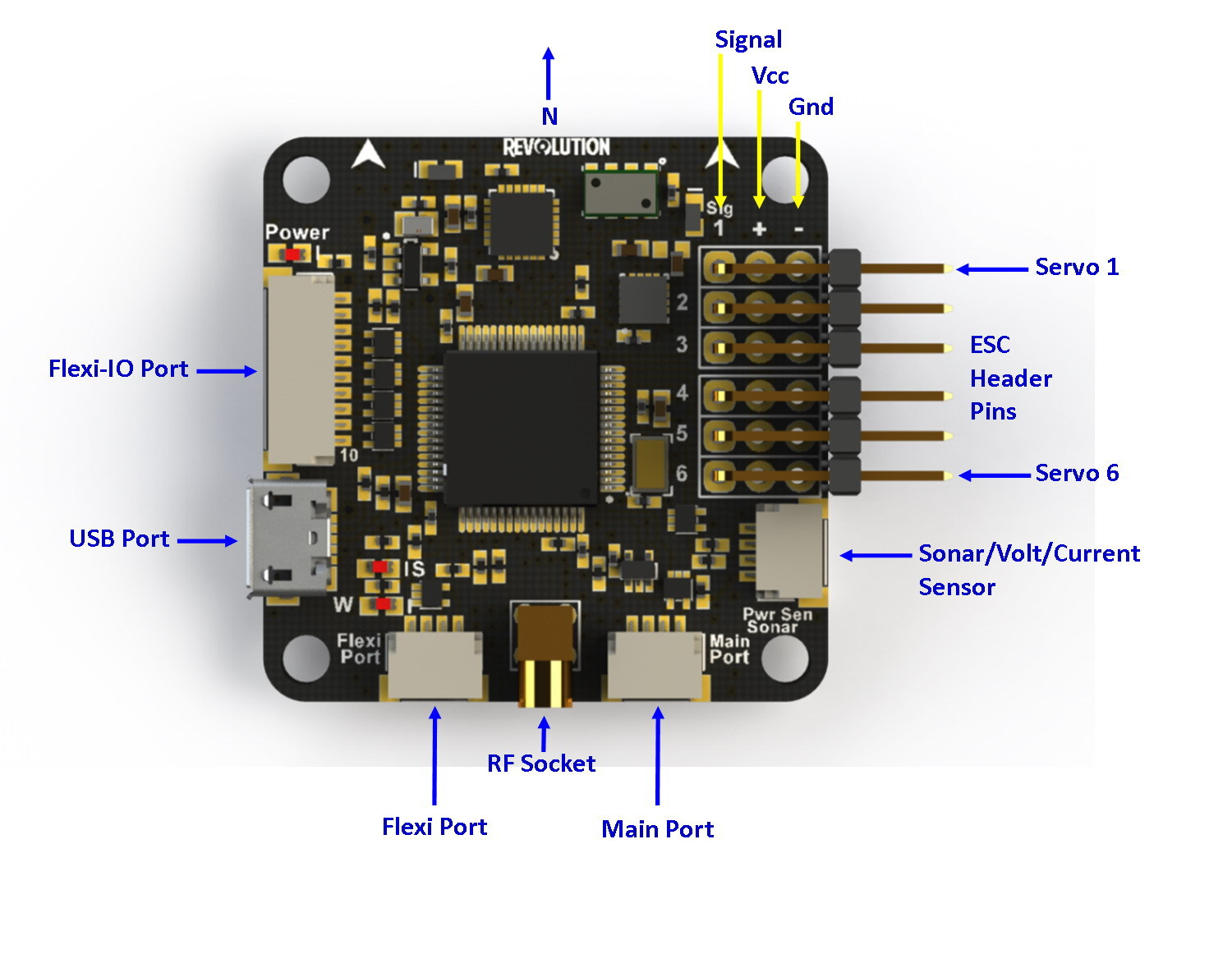
The diagram below shows all the connections on your Revolution board. You connect your ESC/motor to the right size servo pins with the signal pin being the one closest to the center of the board. On the left you have the USB connector and the R/C receiver connector.
Download Librepilot
Since the openpilot project has had some issues with the developers so now the project is dead. However a core group of the developers have moved to start librepilot which is still actively developed…
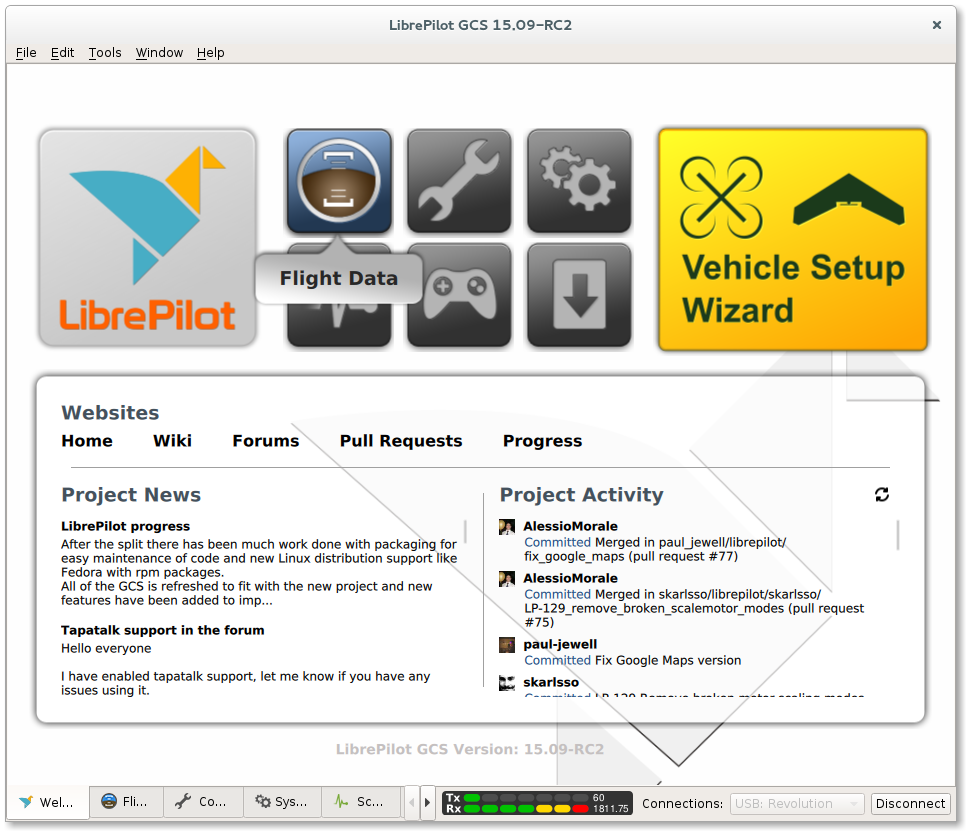
The first thing you need to do is to download the latest version of the librepilot GCS software. You use this software to load the firmware and setup your CC3D revolution board. Currently the software can run on PC, Mac OSX or Linux.
Revolution First Time Setup
This section will cover the details on how to install and setup your revolution board for the first time. Its best to follow the vehicle setup wizard which will guide you through the process step by step.
Motor Order ans spin direction
The diagram below shows you the connection order and the motor spin direction that is required by the openpilot firmware. Full details of this are included in the vehicle setup wizard as discussed later in this guide.
If your motor is spinning the wrong direction you just need to swap any two of the ESC-motor connectors as shown in our ESC to motor connection guide
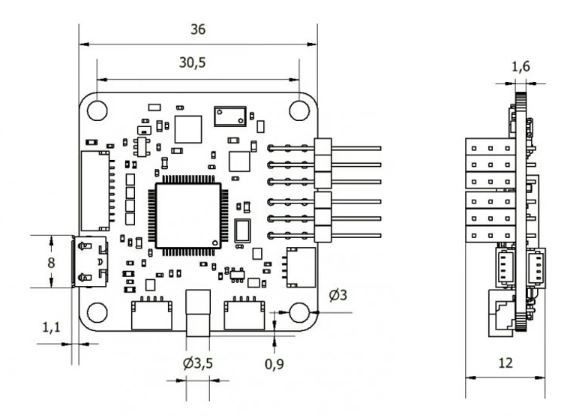
Mounting your board
Since the Revolution is a double sided board, its not the best idea to stick it down using some double sided tape. The best solution is to mount it using some nylon standoffs. A diagram is shown below which gives the dimensions of the mounting holes should you need to modify your quadcopter frame.
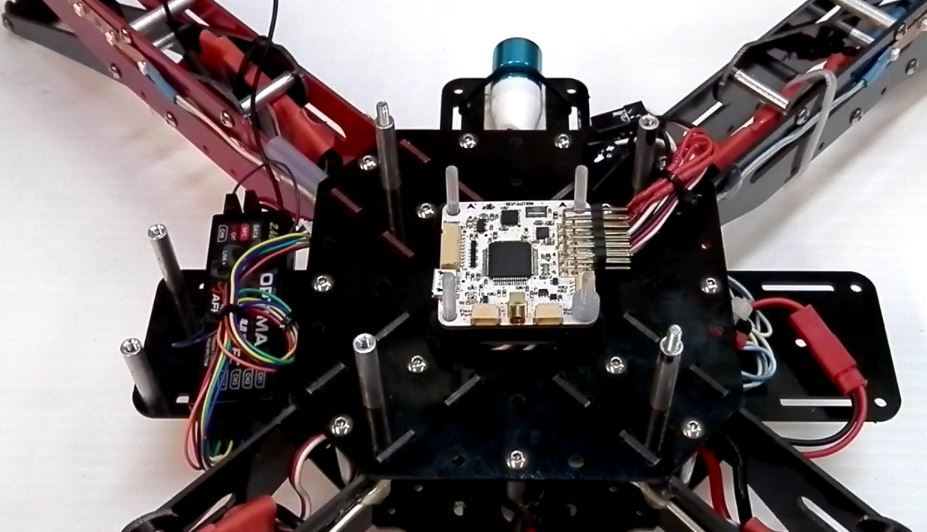
An example of the flight controller mounted to your quadcopter is shown below using some standoffs.
Connecting everything to your board
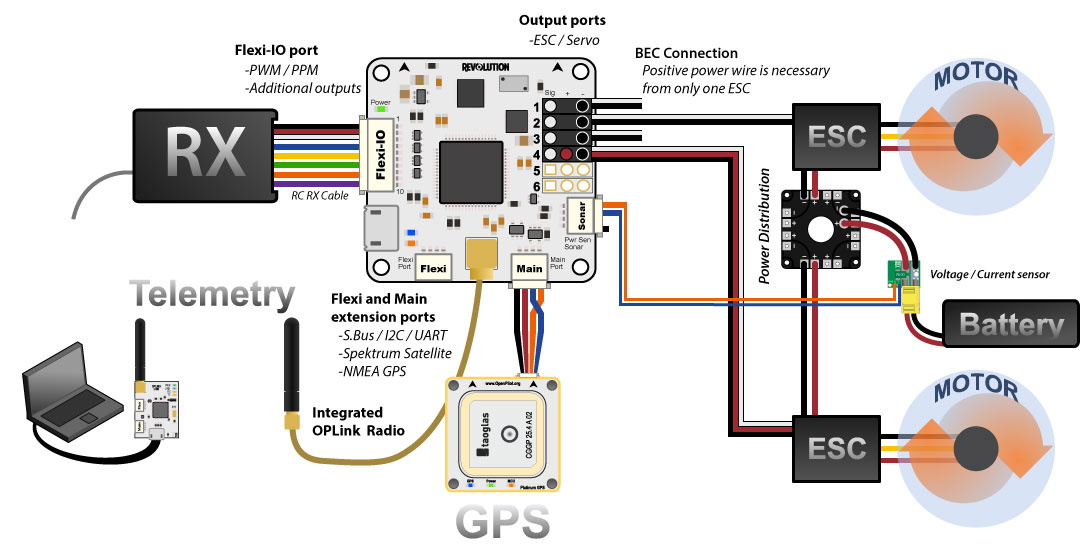
The diagram below shows the basic setup on how to connected your CC3D Revolution board together with your multirotor gear. Your R/C receiver connects to the Flexi I/O port, you can connect either a PWM receiver, or a PPM with a single wire. The diagram also shows other optional equipment such as GPS module, OPLink Telemetry module and a voltage/current sensor.
Connecting your R/C Receiver to the Flexi-IO port
The Flexi-IO port is a 10 pin connector located next to the USB connector. The Flexi-IO port can support up to 6 channel PWM input (as shown in the connection diagram above). But you can also configure the port to be used in a variety of other ways such as PPM input with an extra 5 PWM outputs (hence the name flexi-IO port). If you dont know what they are you might want to check out our PWM/PPM guide to learn more.
Combinations include:
- 6 channel PWM input for receiver + 2 GPIO
- 1 channel PPM input for receiver + 5 PWM I/O channels for motor/servo or sensors
- 4 pin SPI + 1 UART + 2 PWM I/O (PPM mode)
- CAN with external transceiver, UART, 4 PWM I/O / PPM
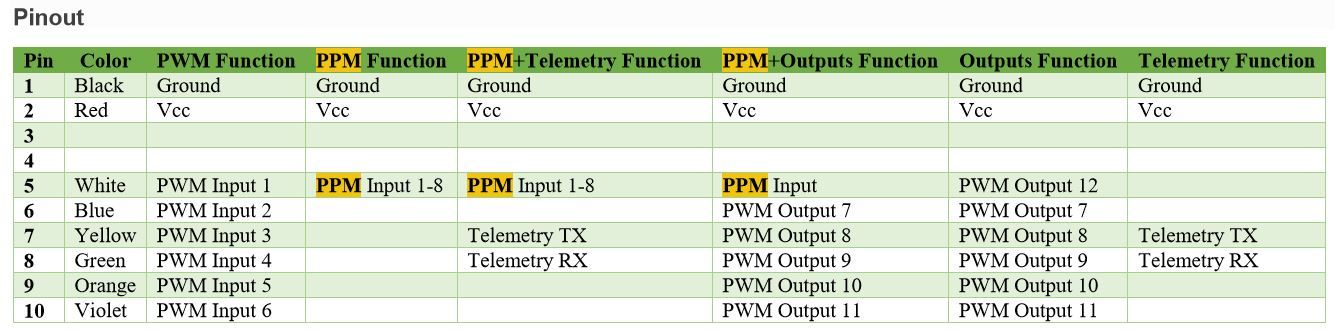
If using a PPM receiver the signal line will need to connect to pin number 5. For more details please see the flexi-io pinout table below
Flexi-Port (connecting Spektrum DSM2/DSMX)
The flexi port is a 4 pin connector that you can used as a UART or I2C bus, just like on the CC3D flight controller. THis means you can connect devices such as i2C ESC’s, or an Airspeed sensor to the flexi port. However the most common use for this port is to connect your Spektrum DSM2 or DSMX satellite.
Please note that when using a Spektrum adaptor, it required a 3.3V power source. So you will need to use a step down voltage regulator.
Also the power output on pin 2 is dependent on the voltage supplied to the revolution board
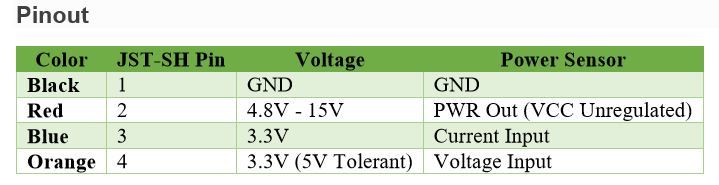
The pinout for the Flexi port is shown below:

The Main Port (S.BUS)
The 4 pin main port is used as the revolutions serial port. You can use this port to connect your SBUS receivers, Spektrum DSM2/DSMX which allows you to use the Flexi-IO port for other applications. As with the Flexi port you might need to use a voltage regulator to power your SBUS or Spektrum receiver. The pinout of this power is shown in the table below.

Current/ Sonar Port
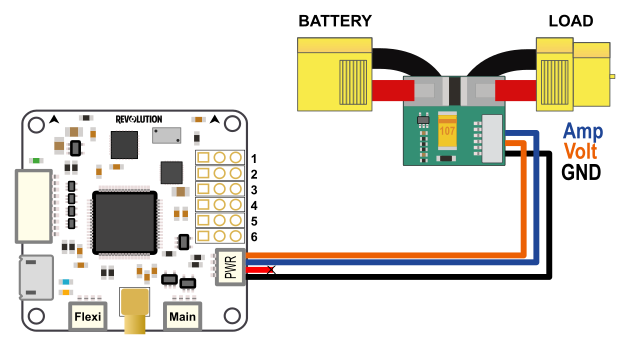
This port allows you to connect an autopilot voltage and current sensor to your CC3D revolution board, enabling you to monitor your battery while in flight. You can also use this port to connect an ultrasonic sonar such as the HC-SR04.
Here is a diagram that shows you how to connect an APM power module to your Revo board. Please note that its a good idea to double check the pinout of your power module before connecting it to your revolution autopilot.
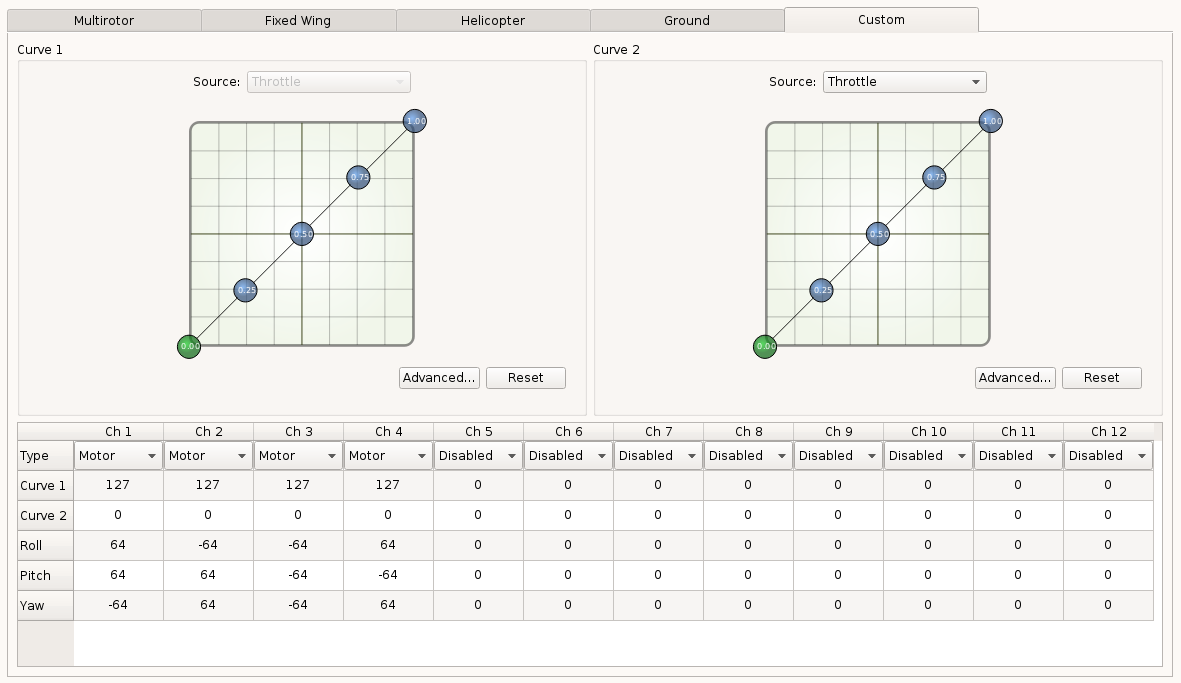
Setting up your Revolution Board and your quadcopter
One of the best features of the openpilot platform is the vehicle setup wizard which walks your through the setup process which makes things very easy for a new drone builder. There is a wizard for both fixed wing and multirotor drones with an intuitive step by step process.

In some cases the initial firmware upload does not work in the wizard, so you just need to load the firmware from the firmware tab on the application as shown below.
Calibrating your sensors
The advanced sensor calibration process for the revolution board is slightly different from the regular CC3D. The video below discusses in great detail how to go about the calibration process.
OPLink Modem
The OPLink modem is a telemetry module that is actualy build into the CC3D Revolution. But in order to use bi directional telemetry you will need another OPLink modem on the ground. For more details on that please check out our OPLink Modem quickstart guide.