Hi, I arived on this site while I was searching for some info due of the max-amount of tv-lines ( TVL ) for a FPC setup. This site gave me answer and help: about 800TVL will do!
First I must confess, I don’t have a drone but a rc helicopter a LAMA V915. It’s my second heli.
( in the future I want to have a full channeled heli, now I’m missing collective )
I’m a skilled mechatrinicus and (micro-)elektronicus.
For those interested in some projects, watch:
http://europakade.nl/motion-control-and-robots
or go direct to youtube to see some vid’s.
Best regards! Marcel
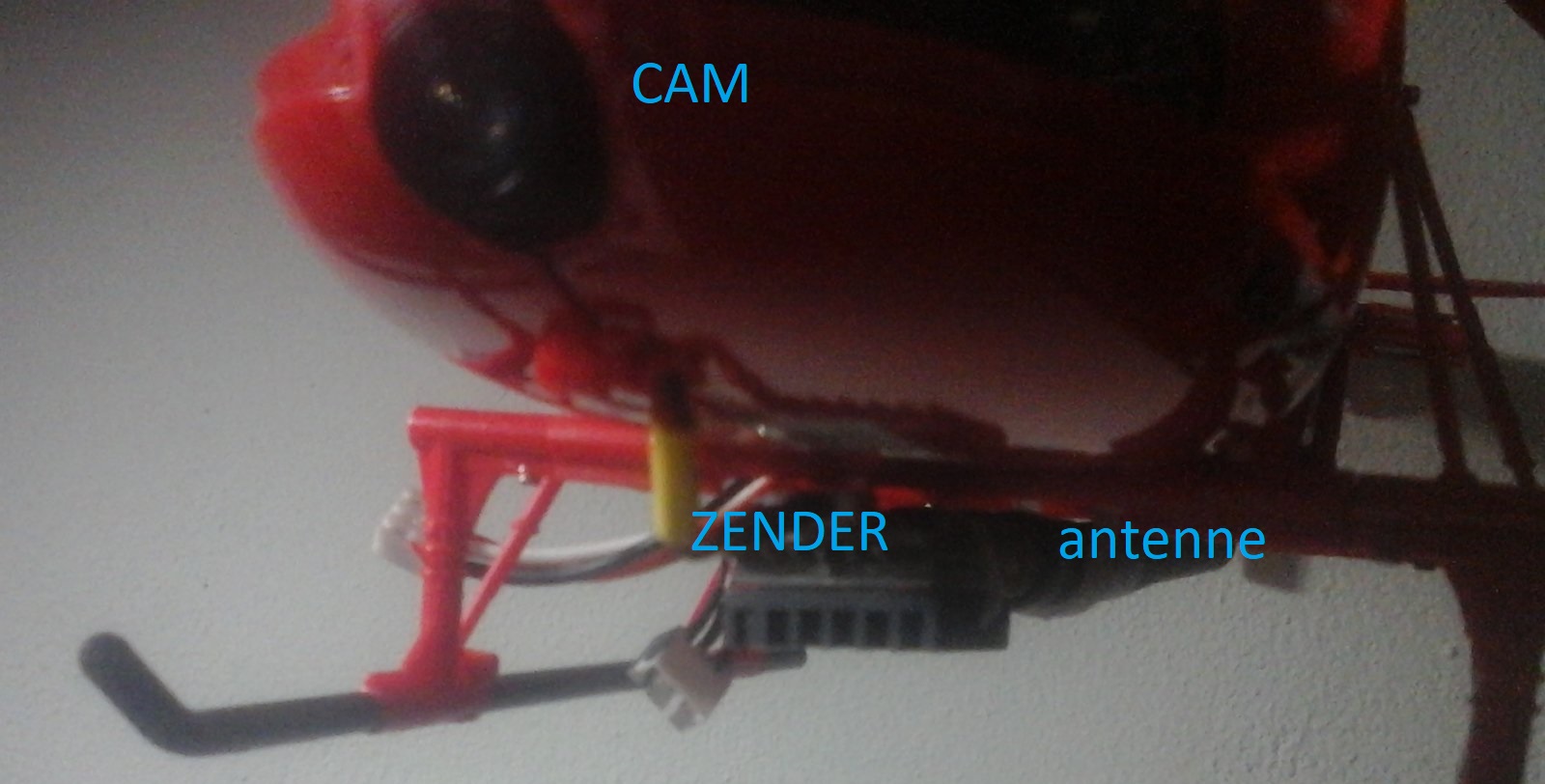
At the moment, I’m researching and checking lot’s of components.
A cam and a seperated transmitter will do fine!
( a set has lower tranmission power, I like to go 200mW upto 600mW )
Receiver is not a big deal, both of receiver-with-PAL/NTSC-out or a UVC-based-out will do fine for connection to a PAL/NTSC-LCD-tft-screen or mobile/laptop/pc.
Well, the actual goal is to watch ‘stereo’.
( no problem for me to set up a double camera and double transmitter and use different frequencies )
Got an old empty VR-goggle. ( had a build in split- screen and wifi android etc )
So, I could build in 2 seperated small ( say 2,5inch ) PAL/NTSC-screens and 2 separeted PAL/NTSC-receivers. 2 screens and 2 receivers would cost about 60euro, shipping included. Got the skills to do that, including adding a battery.
I’m not sure but will these goggle do the same? I think, that’s how they work? Here:
https://www.gearbest.com/fpv-goggles-monitors/pp_009972759312.html
All regards. Marcel
Plans have been changed, my first prototype is controlled by my Rspberry PI.
First test are impressive!
- rapsberry pi
- old vr glasses
- 5inch 800x480 tft/touchscreen ( later to be a composite video screen tft 5inch 800x480, only 13euro inlcuding shipping )
- playing side-by-side youtube test 3d videos.
Later to be modified as FPV with tjhe welknow 5.8GHz stuf!
I’m allready impressed by the result. Must say: in the set up above, 800x480 is defeinitly the minimum!!!
Final version, gets my pi zero and composit video tft.
Here you see pi 3 b. with toucscreen/tft.
1 Like
Very cool, I have not done much 3d fpv before as it has always been quite expensive. There was a product called nerdcam 3d that did this with a single transmitter as it did the onboard computation and send the 3d video as a single video feed that did work well, but was abit bulky and expensive for most people. I think now that the company has closed they maybe published all their files and code online so you may want to look into that for more ideas 
1 Like
Started with this next idea.
The approach sounds very interesting.
First gonna build a testversion ( non-SMD )
Kind regards.
1 Like
Looks abit too hardcore for my soldering skills, but looks like fun for sure!
Hi, has been some time…
Recently continued and have nice results.
Hardware and software at the cams side are ok. Only need some fintuning.
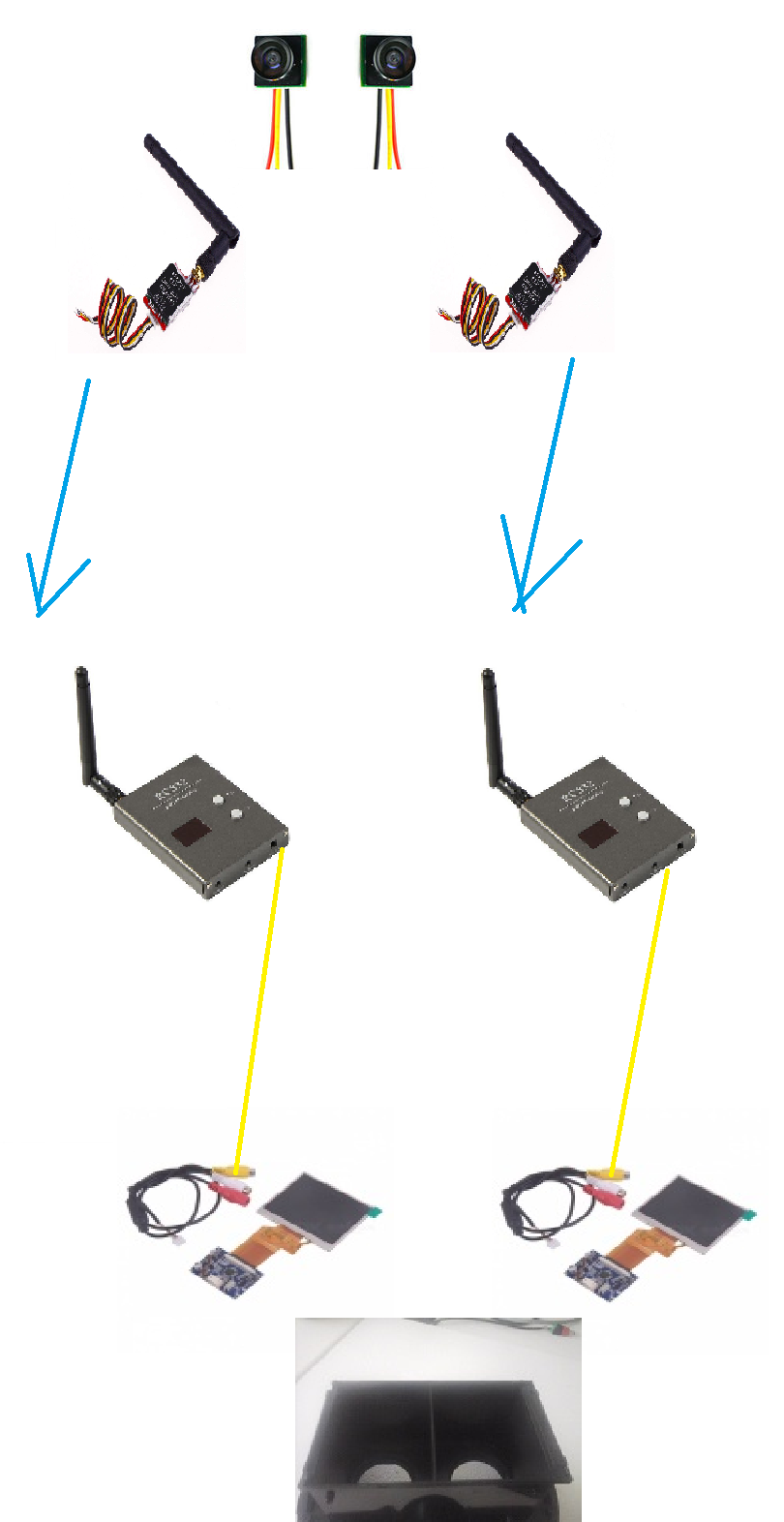
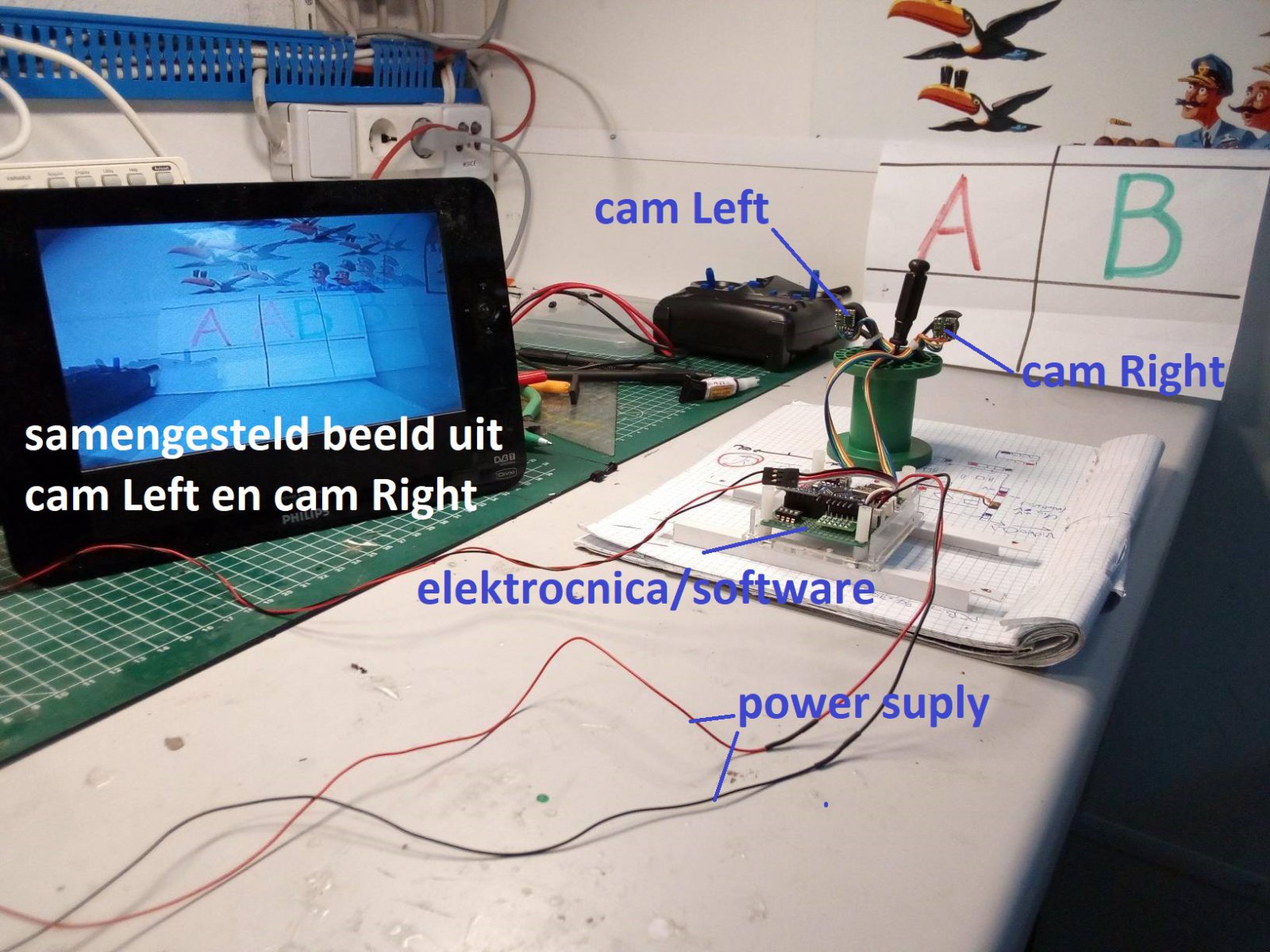
Briefly: 3D FPV. Use 2 cam’s, one trnasmitter 1 receiver. Signals of tboth are synced and “combined as 1 video signal”. Only 1 transmittyer needed ( no struggling with 2 transmitter signals). Receiver “extracts” the incoming signal to a left-eye and right-eye picture, displayed on a mobilescreen . Extraction is done by software/app.
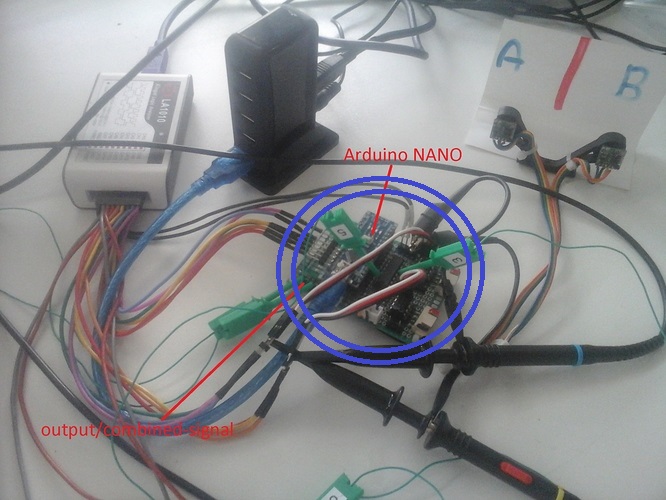
Here you see the “combined” signal. This signal is goingn to be transmitted!
This specific setup, gives the half of the TVL.
At the moment, both cams have 600TVL.
This results in 300TVL at receiverscreen.
Later, gonna implement 2 1200TVL cams.
Have to find out if/how/etc it works.
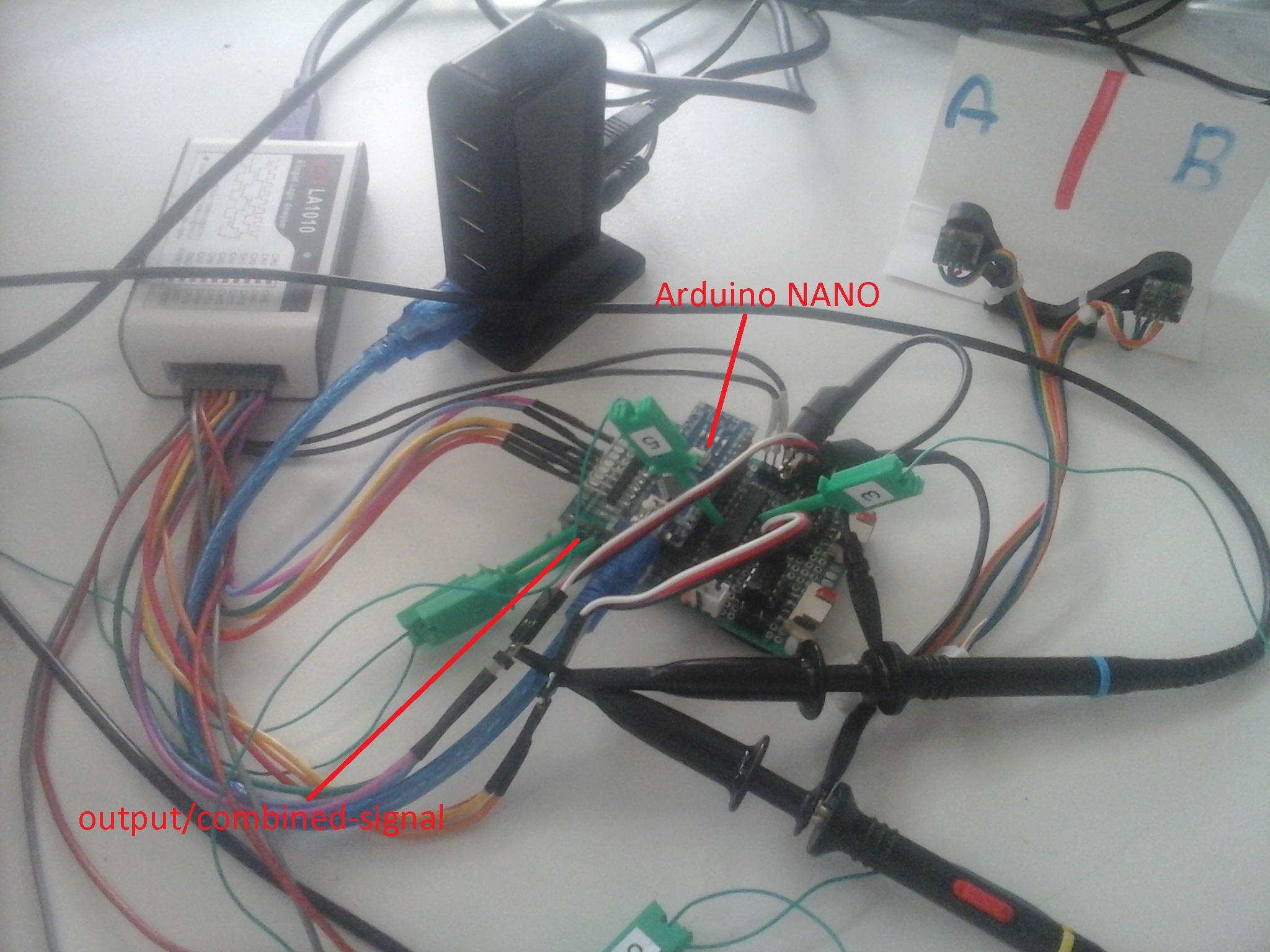
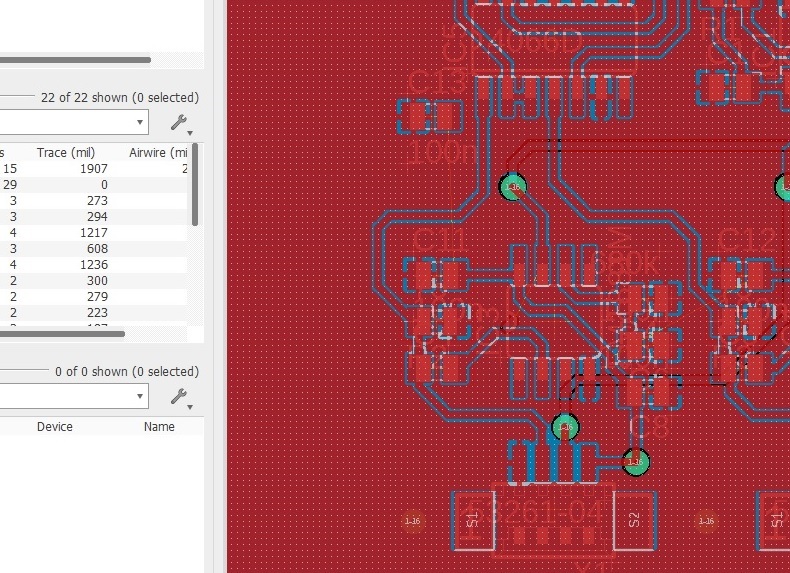
Here the pcb, for prototyping, with lots of extra measure-pins.
Later gonna make a very small one. With onlu the funcional connectors
and the microcontroller as 1 chip and not as an board ( in this case Arduino Nano, see picture )
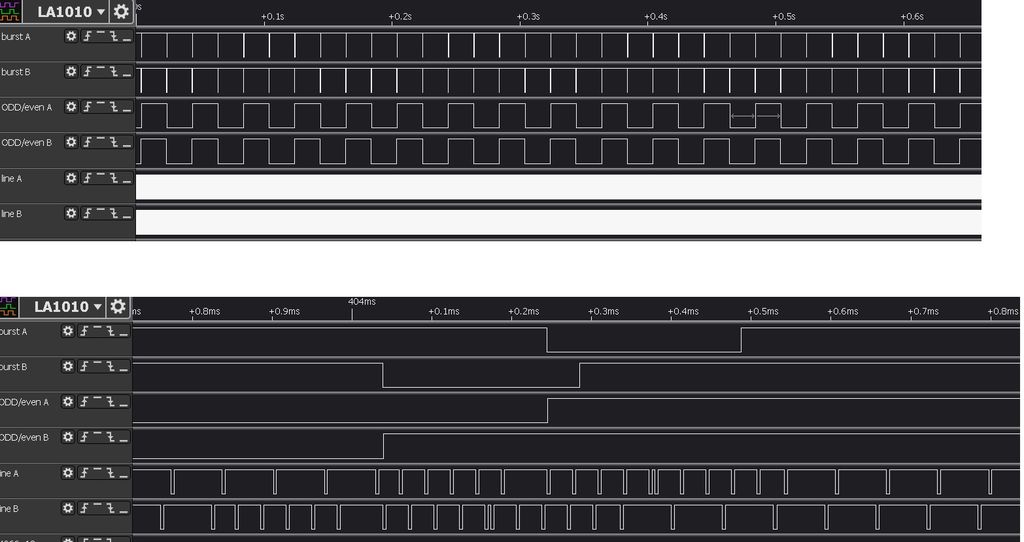
Picture show logic analyzer plot.
At the moment, the sync is now acurate within the duration of the burst signal.
Tnx!
Recently ordered and received the parts fort version 2.0!
The pcb will the size aprox within a matchbox. ( it can still smaller but not needed ).
There wiil be only connectors for Power(5V, 0V), ca,-A and cam-B, and OnBoardProgramming.
Cam connectors will eacht have 5V, 0V, video-signal and control-line.
There will be no conenctors for testing.
Version 2 wil have cam’s with higer resolution.
1 Like
After a break, things have been finished!
IT WORKS!
Finished setup:
-
2 cam’s
-
pcb ( ATtiny with DIY software )
-
5.8GHz transmitter
-
5.8GHz receiver ( video grabber )
-
mobile foon ( purposed for FPV only )
-
foon goggles
The result is realy mindblowing!
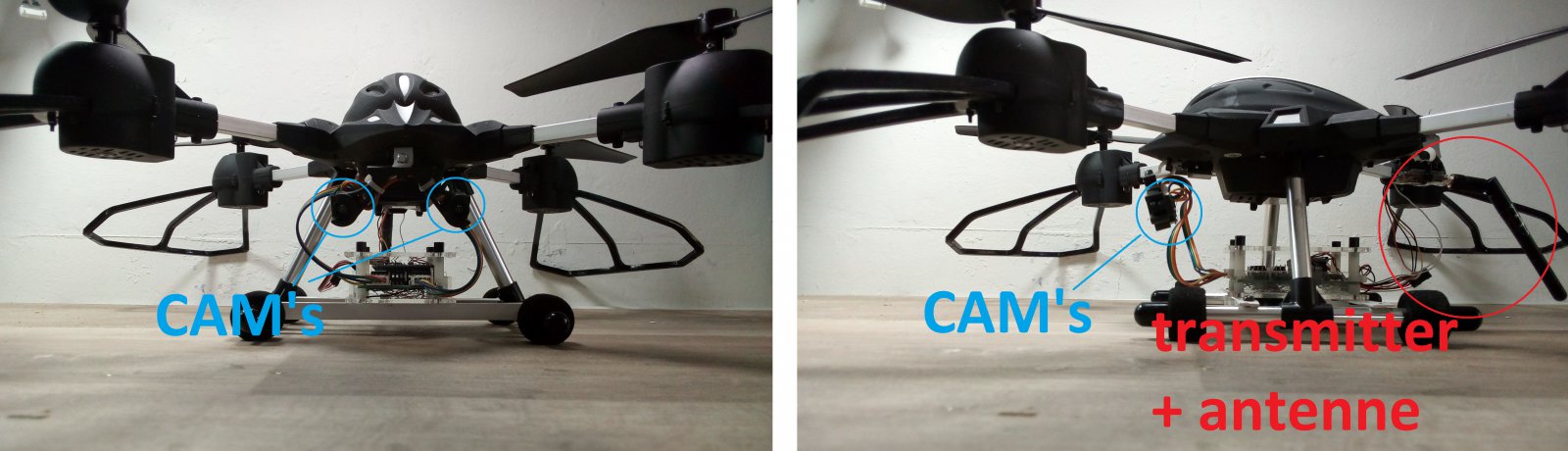
Next step is to exchange the 600TVL cam’s with 1200TVL cam’'s
In the current setup, the cam’s have about 8cm distance between them.
Later, under the drone, it will be about 30cm. Dis means you can’t fly in home anymore.
Just experimenting…
Now I got a heli with ‘mono’ FPV and the drone with 3D.
Hopefully, soon I can post video’s, so you can see them too.
For the time being: some pics…
Posted this picture before, the whole V1.0 setup of the pcb. it’s a big one but ok.
Now, I’m designing V2.0, it will be about 40x40mm ( it can still smaller ).
All components are smd cased.
Not finished V2.0
The conectors have 1.27mm pitch.
There are 2 cam connectors, 1 connector to transmitter and the 1 for programming/powersuply.
Another ‘next’ step is topurchase a nice heli or drone with more controll funcions.
The heli has only 4 channels and the drone also. But the drone is a big one, that’s the main reason I purchased it. Watched around and noticed that for a reaonable price, one can purchase a verry nice drone, with gps and other stuff. Still, I prefer a 6 channel heli…like the 4F200LM…3 blades hli…
The reason I prefer a heli: it keeps more horizontal. A drone tips over like a crazy bird.