The frame comes with a distribution board for signal and power. And while I want to use it to distribute the power to the ESC I want to keep the signal leads from the esc to connect directly to my Rx (Spektrum AR610).
When I connect the battery when going through the OpenPilot setup mode I get power to the motors but no power my Rx. I’m missing something but can’t find what… Not new to RC but new to drones.
So it seems I get the power to the ESC and motors so my connection to the distribution board are ok.
so 4 motors connected to 4 ESC each with their power leads connected to distribution board but their signal leads (2) going to their corresponding connection on the CC3D Atom and the Atom connected to the Rx. Should I get a power lead from the distri board to the rx?
Could you maybe include a few pictures as its hard to understand exactly what is going on as I am not very familiar with that frame.
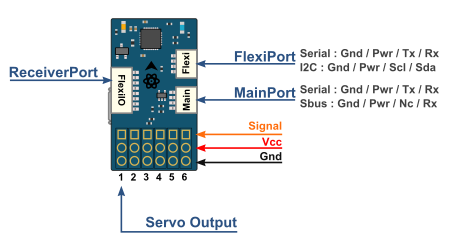
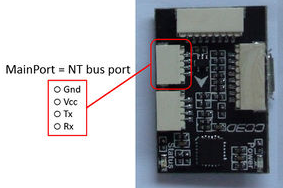
However it sounds like you have not connected your receiver correctly, as the receiver /main/flexi port on CC3D provides 5V out to power your receiver. I believe the top two pins are for power and ground respectively.
Hi Alex, thank you for responding… as I said not new to RC as I have 2 RC cars for bashing with my son. Bought second hand as chassis and repaired and fitted the electrics and I race RC sailing boats. But here for some reason I am struggling.
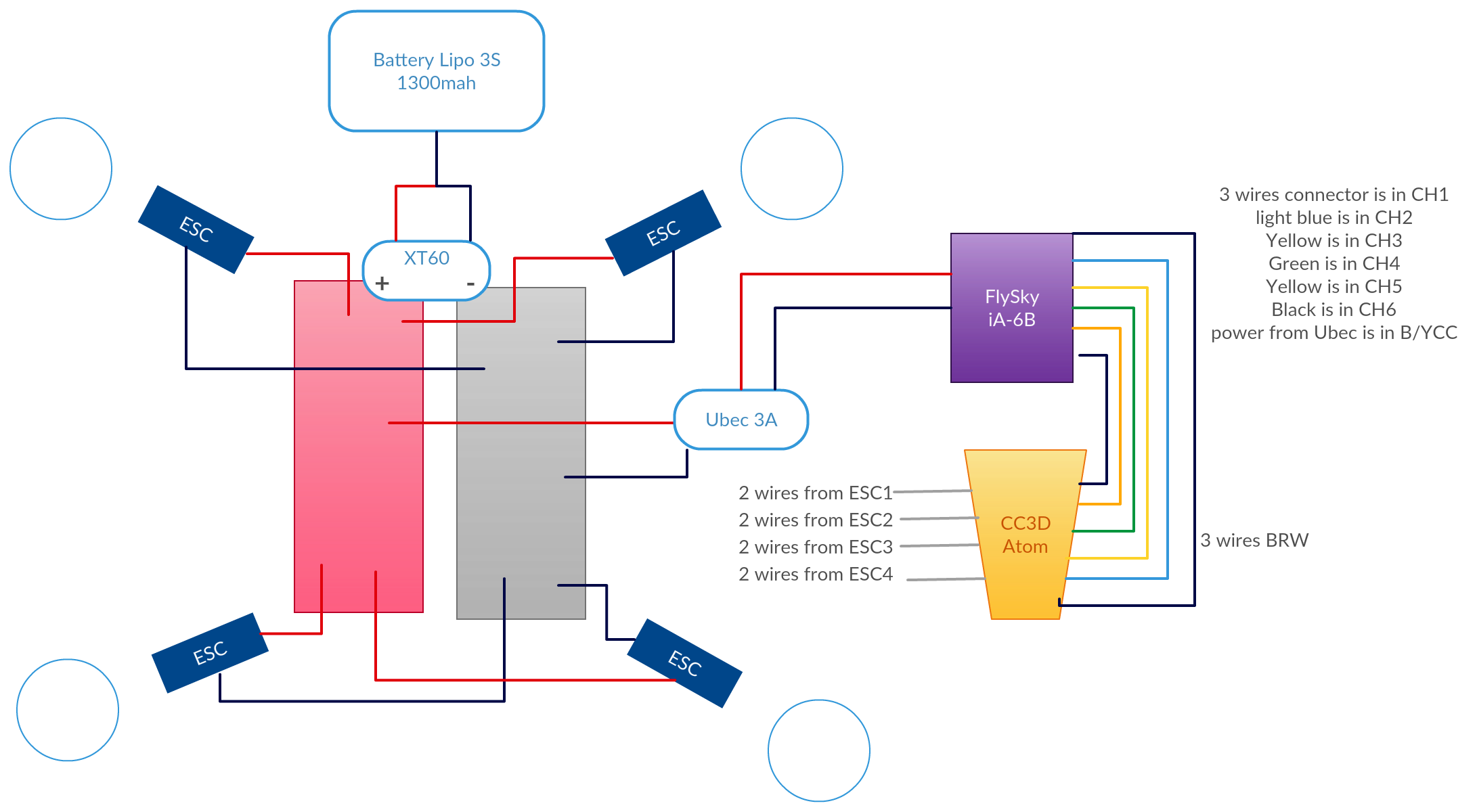
I apologise for the poor quality of the drawing but I’m not an engineer however it should reflect the wiring diagram I have so far on the Tarot 280H. It is the one with the swinging canopy from Tarot… same as the 250 but with longer arms to put 6 inch props.
Ok so since my last post I check that the AR610 RX was working properly by directly powering it with a battery to the batt port and pluging a servo on channel at a time and all working fine. So I know the Tx and Rx are ok. But obviously the Rx was not getting the power. so I soldered on the cable from a UBEC 5A I have onto the distribution board of the Tarot and the other end to the Rx and sorted we know have power.
I since went through the firware upgrade of the Atom, went through the wizard setup of the drone… all good so far.
Now go to the Tx wizard.
all the controls work fine as per the wizard so I know the signal from the Tx to the Rx through the Atom to the GCS is working fine. That up to the point I need to use the flight mode.
When I flip the switch H, but tried G and F on the Dx6 nothing… also with the Dx6 the pitch was not recognised.
So I changed to a flysky FS-i6 Tx and iA6B Rx and all the 4 channels controls by the 2 sticks are recognised and working as expected on the screen as on the Tx but here again nothing happens when I flip any of the switches on top. I tried the SWD as it is a 2 position switch but nothing.
I am at a loss now on how to assign a switch for the flight mode.
Hope this helps to recap where I am in the build and how I fixed the initial power issue on the Rx (hope what I did is ok) and the problem I face now.
BTW I set the arming as per your video with the Yaw on the left… tested and that worked. However 2 motors at the rear 3 and 4 started together where the 1 and 2 were kind of spinning but nowhere near as fast as 3 and 4. did I do wrong the setting of each motor neutral position?
Finally found the answer to the above flight more issue. I reassigned channel 5 to SWD (a 2 position switch) and bingo that worked as planned. I then set the 2 stabilizer modes as per your video being a newbie. Thx.
Now when I arm the drone and start to push the throttle up, 3 of the 4 motors seem to work in sync but no1 is not. It starts much later as I move the throttle up on the Tx. not sure where this come from… Is that due to the neutral not being stored properly?
Ok this is very odd now as I switched everything off and back on again it is motor 2 which start spinning later than the other 3???
Hey, happy to see you made some progress. I think issue with your spektrum radio is that it needs to plug into the flexi or main ports. But at least you got the flysky one working with PWM.
As for the motors, yes that is most likely a ESC neutral point calibration issue as you suggested. But it can also be an issue with the flight controller not having its level position set correctly so it thinks it’s at a slight angle causing telling the other motors to power up first to get the quad level.
Let me know of an ESC calibration sorts out that issue. But it’s also a good idea to do a manual calibration by plugging each ESC directly into your receiver throttle port and turning on the ESC with full thrust and then moving stick down to do a upper and lower point calibration so all esc’s are the same.
We have a setup guide here showing the neutral point calibration at about 8:00 in
Hi, yes but it is not without its frustration… it seems as I overcome a problem I face another… I am learning which is good but I’m not flying yet…
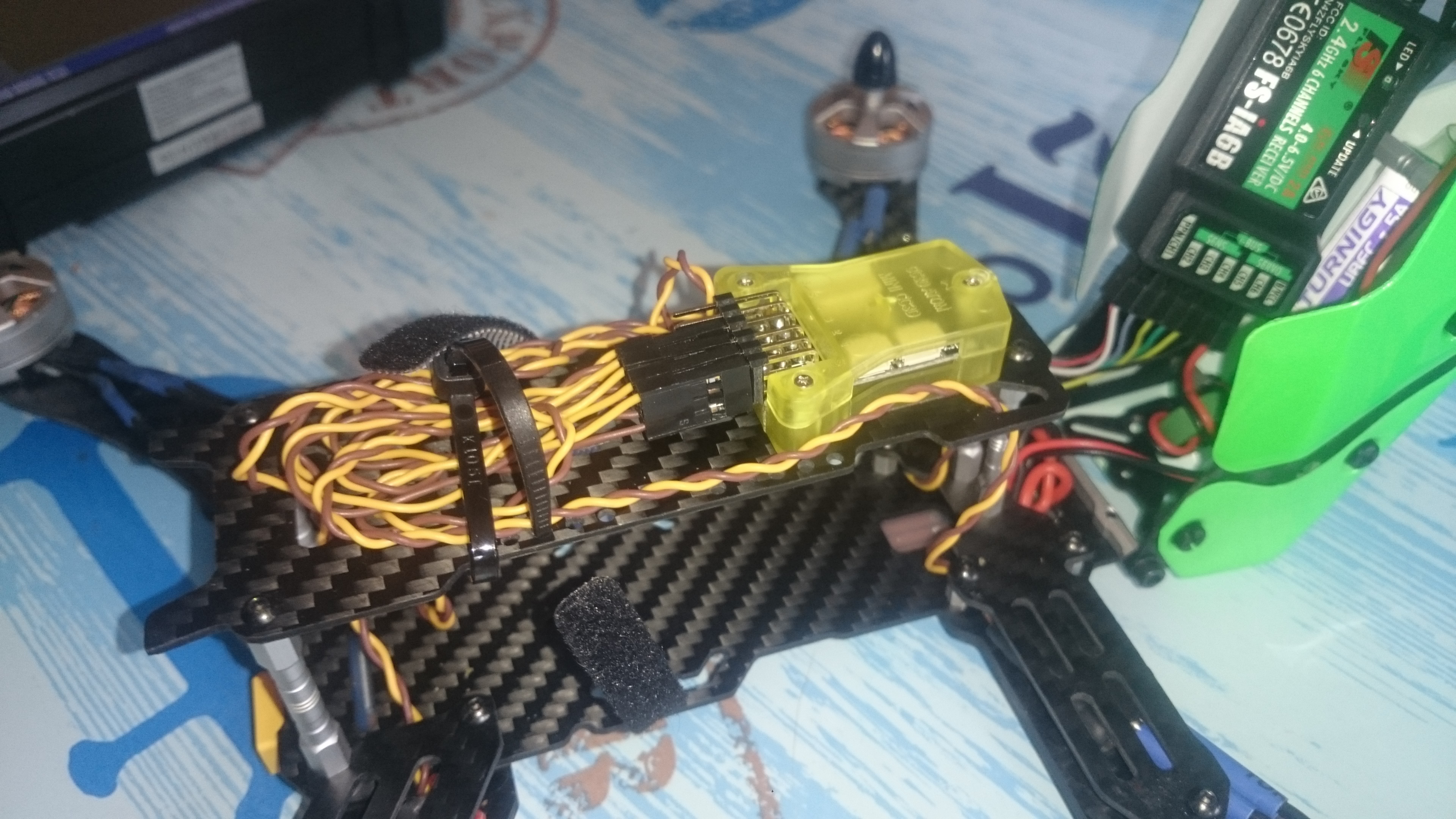
I have attached some pics I took for your review. One thing is I had soldered all the connections first to do all the calibration and setup wizard then when all was ok I desoldered everything to cut each wire to length and do a proper solder everywhere with some heatshrink so it is need and protected.
However I have a question on the disctribution board. It had 4 holes for the 2 + and 2 - wires of the 2 front ESC. A breeze to solder them on initially but then when I removed them to solder them in at the correct length it was a nightmare. Basically it looked like the wire pre-thinned was too big for the hole and the wire wouldn’t get it. Ended up pointing the very tip of my soldering iron in the whole to touch the solder of the wire to melt it enought that the wire would fit in… Kinda worked for 3 of the 4 cable with great difficulty but not for the 4th one… The current is going through np but not neat… any tip for this option of soldering on wire on a hole?
btw nice tip re connecting each ESC to the throttle of the rx … make sense will try that thanks a mil
few pics of my quad below…
not all the heatshrink are set yet as I wanted to test each motor was working as intended and in spinning in the correct direction before setting them. The Rx is a bit big and I need to find it a place.
And no FPV for now as I want to learn how to fly it first then we’ll see.
Hey Thank you Alex, much appreciated as these drones are not yet that user friendly to setup… but like everything I’m sure they will be soon and this is of great help for most of us. Thank you