rock
24 March 2017 17:31
1
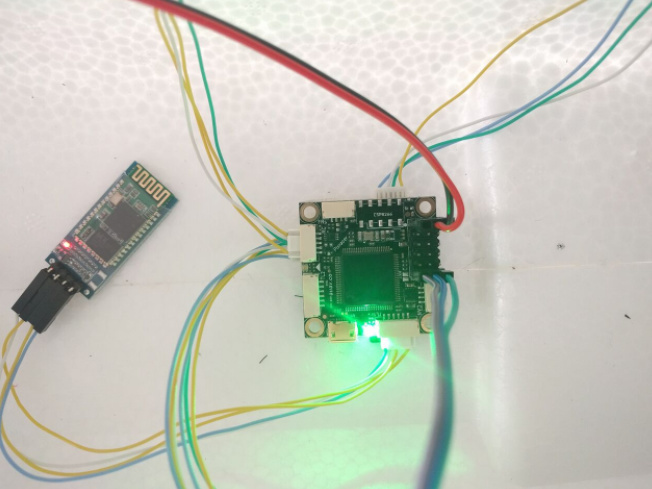
I’m running a Pixracer with ArduPlane V3.7.1.
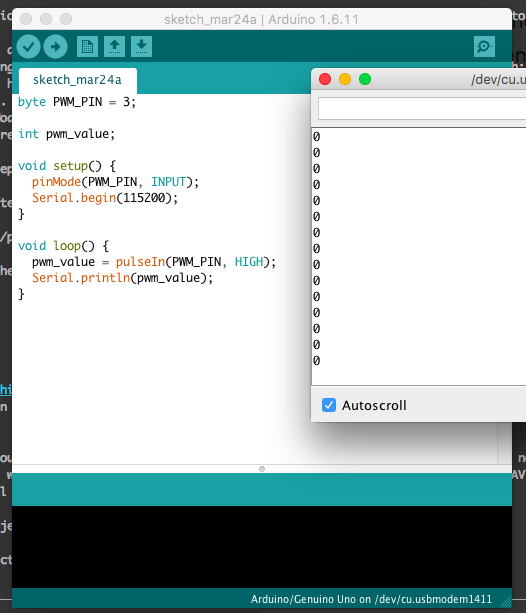
I was unable to get the servo output working so I connected Ch.1 to the Arduino to read the raw PWM output.
Here’s what that looks like:
Here’s what I’ve done so far:
ARMING_REQUIRE=0, for good measure
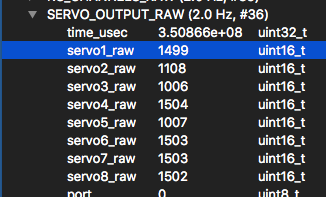
Expected output:
Measured output:
Would appreciate any help here.
rock
24 March 2017 19:19
2
Additional input on the issue, note that the expected outputs are consistent with the RC input:
However, the observed PWM output is 0 for all servo channels.
rock
24 March 2017 19:20
3
@unmannedtech1 I got this from you guys a week or so ago. Would appreciate your feedback. Thanks
Dont know if you have done this, but are you using the safety switch as pixhawk will block any pwm outputs untill the safety button is pressed?
Also what is your status led doing on the board? Is it flashing slowly?
rock
26 March 2017 09:23
5
I did use the safety switch, though it’s optional on the Pixracer and has no effect when ARMING_REQUIRE=0 … No luck.
The power LED is solid green. The status RGB LED is off, probably because it may still be unsupported on Arduplane. I’ve tried flashing the PX4 firmware as well, but the results are the same (no servo output).
1 Like
 Connected external 5V power source on output rail
Connected external 5V power source on output rail