Order Number: 4165
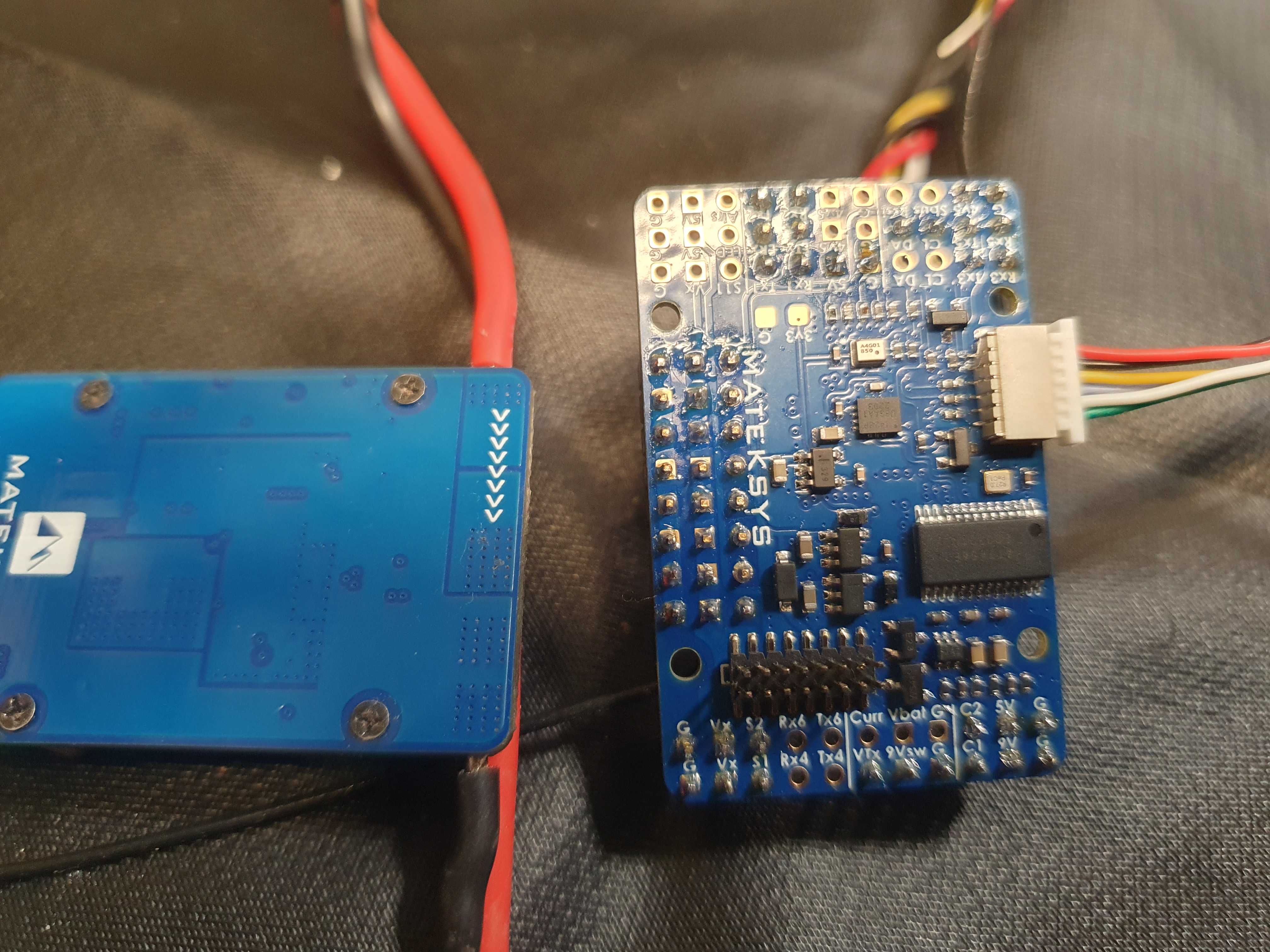
Product Name: Matek F405-Wte Elrs Wing Flight Controller
Brand: Matek Systems
Over the past 3–4 weeks I have attempted to integrate a GPS module with my flight controller (FC) for a fixed wing UAV project. Despite extensive testing, configuration changes, and hardware verification, the FC has consistently failed to parse GPS data and has also refused to calibrate its internal compass. Multiple independent tests confirm the GPS modules are functional, the wiring is correct, and the UART port itself is operational. These findings strongly suggest the FC is defective or mis manufactured.
Background
• FC bought to go in a Sub 250 g autonomous fixed wing aircraft with GPS navigation and telemetry.
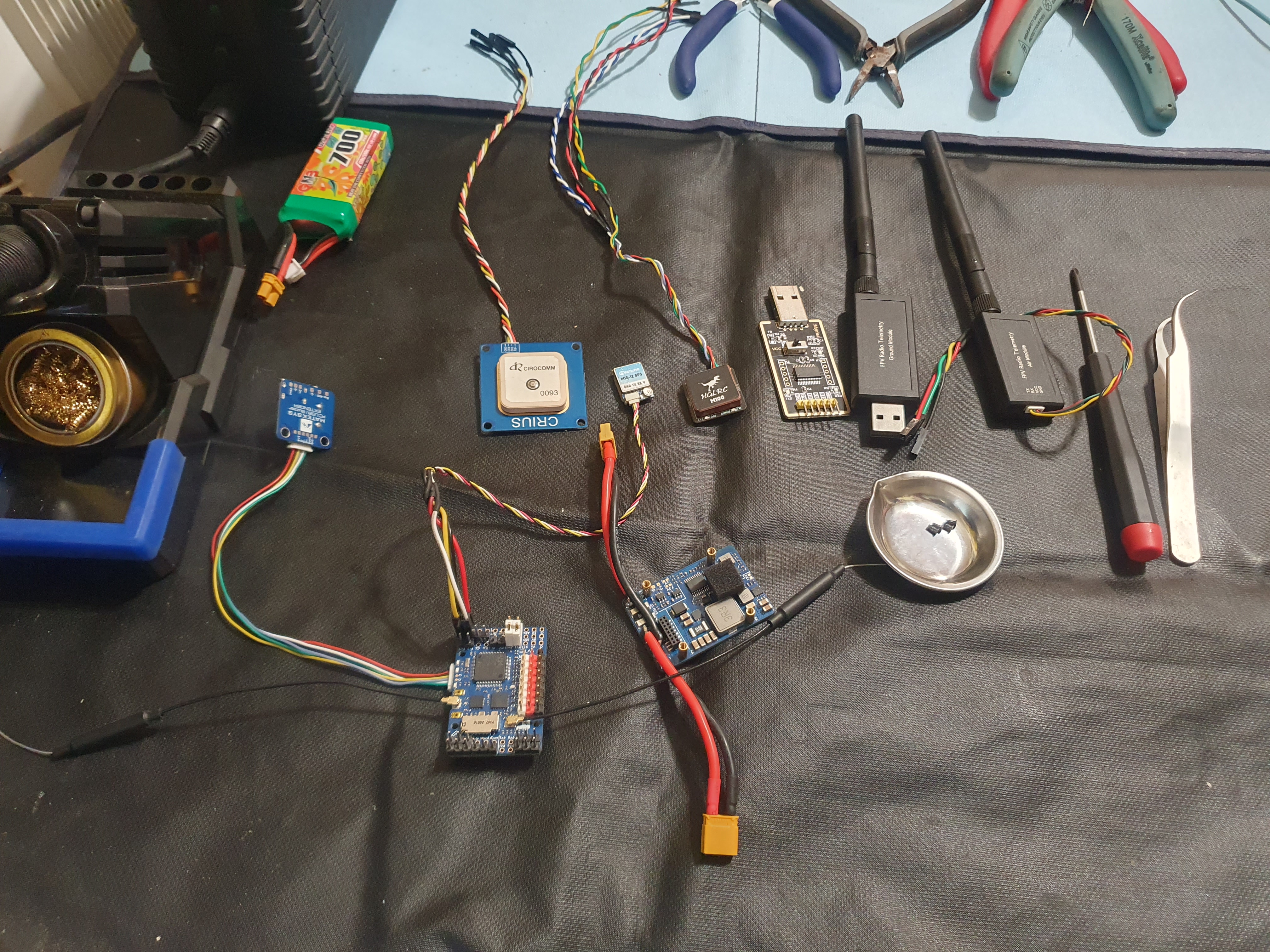
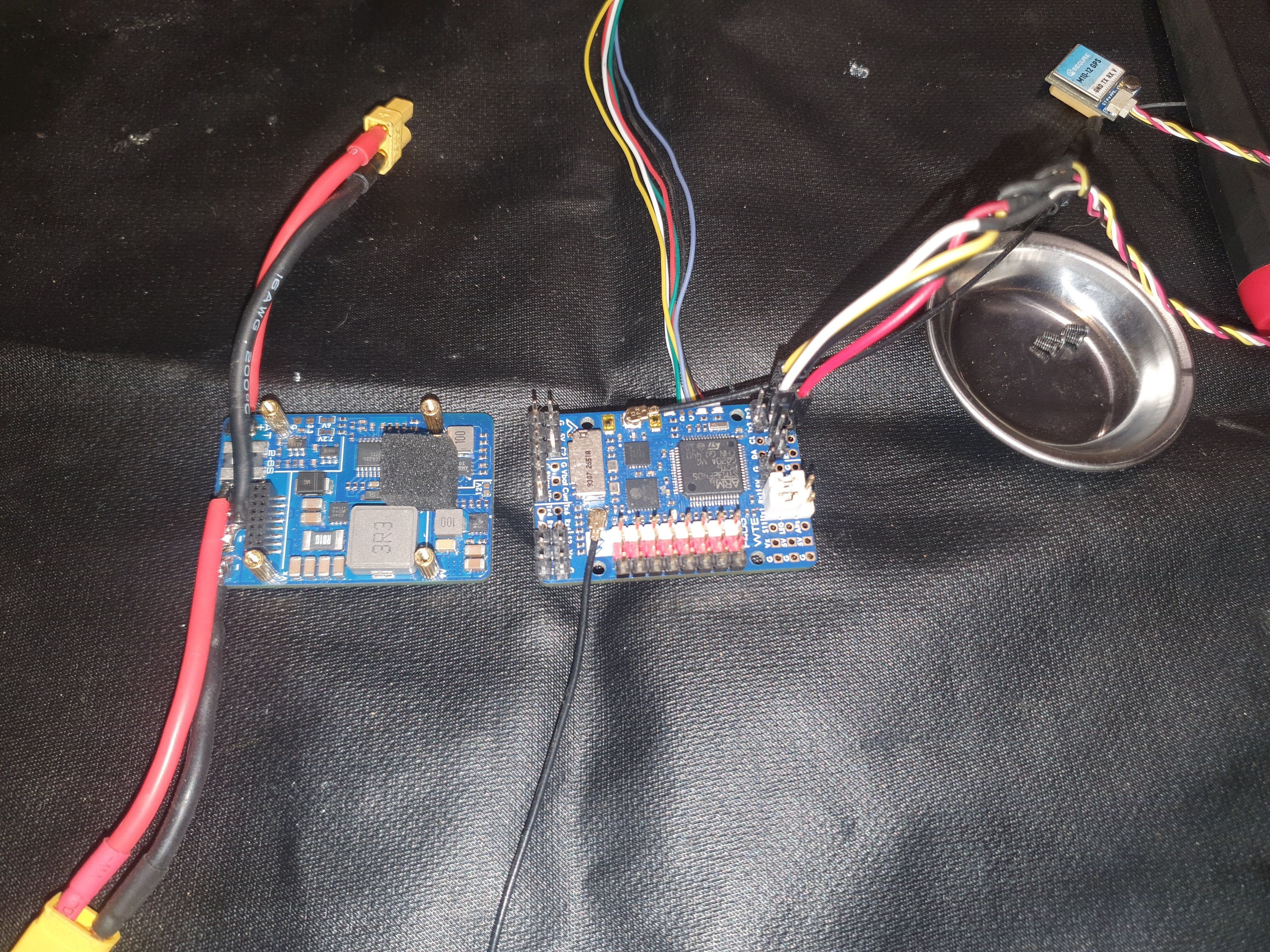
• Hardware used:
o Flight Controller (supplied unit, advertised as supporting GPS on Serial 3 / TX5 RX5).
o Multiple GPS modules (M10 12, M8N, others).
o 433 MHz telemetry module (used to verify UART functionality).
• Software tools:
o Mission Planner (ArduPilot).
o u center (Ublox GPS configuration).
Steps Taken to Troubleshoot
A. GPS Module Verification
• Connected GPS modules to PC via USB TTL.
• Used u center to confirm satellites, baud rate (38400), and UBX protocol output.
• Verified modules powered correctly (LEDs active, ~5 V supply).
• Conclusion: GPS modules are functional.
B. FC UART Testing
• Wired GPS to FC Serial 3 (TX5 RX5) as per datasheet.
• Configured parameters:
o SERIAL3_PROTOCOL = 5 (GPS).
o SERIAL3_BAUD = 38.
o GPS_TYPE = 1 (Ublox).
• Observed Mission Planner messages: “EKF waiting for GPS data” with no “GPS: 0.”
• Performed loopback test (TX→RX short) → confirmed UART echoes correctly.
• Connected telemetry module to TX5 RX5 → telemetry works, proving port hardware is functional.
• Conclusion: UART hardware is good, but GPS data not parsed.
C. Compass Calibration
• Attempted internal compass calibration in Mission Planner.
• Calibration process fails to start or complete.
• Parameters checked (COMPASS_USE = 1).
• Conclusion: Internal compass not responding, likely hardware fault.
D. Alternative Configurations
• Tried GPS on Serial 5.
• Tried different baud rates (57600, 115200).
• Enabled NMEA output alongside UBX in GPS.
• No change — FC still fails to parse GPS data.
- Evidence of Troubleshooting
• Multiple GPS modules tested and confirmed working independently.
• UART port proven functional with telemetry module and loopback test.
• Correct wiring (TX↔RX, GND common, VCC ~4.8 V).
• Correct parameters applied and saved in Mission Planner.
• Internal compass consistently fails calibration.
• Weeks of systematic testing eliminate user error as the cause.
- Conclusion
The FC has demonstrated repeated failures across two independent subsystems:
• GPS data parsing (despite verified GPS modules and working UART).
• Internal compass calibration (despite correct configuration).
Given the extensive troubleshooting and evidence provided, I conclude the FC is defective. I respectfully request a replacement unit or confirmation of a known issue with this batch.