I recently reviewed the falcon 180 which is a great mini FPV quadcopter, but it does require a few tweaks to get it working nicely out of the box. So this is a quick guide to show you the main things you should setup to get the most out of
Haha, yeah good point thanks for pointing that out not sure why I took a screenshot with -10 roll when in the writing I mention motor tilt… will get it updated
Got mine as ARF. Well, instead of removing everything from the top to access the FC, why not just remove the 4 screws on the bottom plate ? Worked for me. When that was free, I could access the 4 screws holding the FC and turn it.
Would be nice if someone told us to use 3-pin (black/red/white) to power the Rx, and the blue wire for SBus/iBus. So many wires to sort thru.
Have not added a camera yet, will test fly LoS first. No reason to crash camera Vtx. Where is the other end of the camera cable ? How do I identify it without taking everything apart again ?
My FC does not report batteri voltage. did a 2-pin connector fall out ? can’t locate it.
Anybody have a pinout of the LED strip ? what address are the individual LEDS ?
Actually since you have rotated the board 90 degrees, your roll becomes your tilt.
I also tried it to find out what happens
by adding -10 to tilt, I noticed it started to roll.
You can also check the changes by looking at the clean flight every time you change the roll or tilt.
So, your original statement was correct, you have to add -10 to the roll.
By the way I like your site, keep up the good work!!!
Alex, thank you for the great info! I’m very new to this, and your page helped me a lot. I have two questions, though…
Do the PID settings that you are suggesting take into account rotating the FC? I don’t know if doing that makes a difference to these settings, but I figured it was good to ask, LOL! I have the board rotated 90deg, and I did make that adjustment.
With those PID settings - in Cleanflight I only have “whole number” adjustments. Would the 4.2, 0.02, 40 be 42, 20, 40 then?
Sorry if the questions are stupid, but you have no idea the depth of ignorance I’m working with here
Thank you for any help you can give!
-Anne-Marie (aka MomFPV)
1- the PID values do not need to change if you rotate your flight controller. You would need to change them if you use different size propellers/ motors or a higher voltage battery, as the pid values dictate how the quadcopter will respond based on its motors/props etc…
2 - since I wrote the guide cleanflight has been updated and instead of decimals everything is integers as it is abit easier to work with in the firmware for storing values on the flight controller, so you are correct with your new values
@unmannedtech1
Alex,
Thanks for all the info, really helped me get started with the Falcon 180!
Kind of “piggy-backing” off MomFPV’s question but when you say,
“2 - since I wrote the guide cleanflight has been updated and instead of
decimals everything is integers as it is abit easier to work with in the
firmware for storing values on the flight controller, so you are
correct with your new values”… does correct with your new values mean that it has been pre-programmed? Or, (maybe a stupid question, but like some others, I’m open to admit I’m pretty ignorant on this topic as well ) do you have a conversion from your Decimal PID settings for the new whole number PID settings?
And one last dumb question, with the included Eachine i6 transmitter (mode 2), how do I arm/disarm the motors? (As you probably know, this thing comes with no instructions )
By default cleanflight has stock PID values that kind of work ok for most FPV quadcopters. But in my screenshot where I suggest some PID values they are decimal values, so with new versions you should change them, so my suggested values of 4.2, 0.02, 40 should now become 42, 20, 40
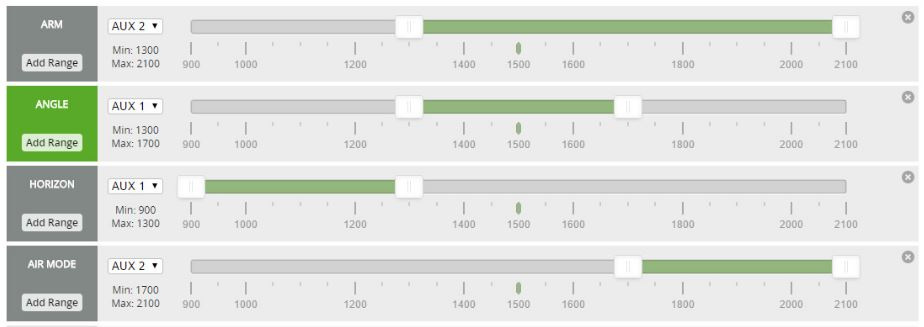
Best is to set one of your spare switch channels to be to arm/disarm your quad as I setup in the guide -
Thanks for the quick response! And I was able to get the motors armed after after reverting back to default settings and just keeping my yaw rotated 90 and tilt -10. Just holding my throttle down and to the right, motors engage…
I will experiment later today with seeing if I can successfully get setting an arm switch to work. I guess I get lost with aux 1 and 2 settings on the modes. I have configured the controller so aux 1 and 2 are switch c and d, it just seemed any directions I had the switches flipped, or flipped them to, it made no difference.
However with more “fiddling” with settings, I’ve noticed I don’t have an “Air Mode” option in my “modes” tab… just arm, angle, horizon, then next one down is mag… Any thoughts there?
Thanks again for any help!
Looks like if no mode is selected, then it defaults to “air/acro” mode. And after some more time playing around in cleanflight and with the transmitter, it seems like my 6th channel just isn’t connected to the FC???
Channel 5 works fine with all 4 switches (tested all 4 to make sure it wasn’t a wiring issue with Swc A,B, or D on transmitter) even could confirm to see the slider/indicator change in cleanflight. However when setting any of the other switches to channel 6, nothing seems to happen (in cleanflight or on the quad) like it does with channel 5.
Even was able to get Swc C on ch. 5 to work as an arm switch, I didn’t keep it set this way and reverted back to Swc C for flight modes, but more was just testing for my own understanding on how the arm switch would end up working.
I’m guessing it’s safe to assume, without digging into the quad and confirming that Ch. 6 isn’t connected, and then actually getting it wired in, I’m either stuck with 1 flight mode (acro) and an arm switch… or I arm the motors with the throttle stick, and can switch between flight modes?
Are you pressing and holding cancel to save the aux settings on your flysky radio, if you press OK, it does not save it… weird I know but thats the way it works
haha oh yeah, I press and held cancel. I was able to see on the receiver in the quad had not only the “bind” pins open but also the ch. 6 pins had nothing attached. Got the bottom board taken off and took a wild guess and matched the only other free plug floating around in the drone with a red, white, and black wire (to match the plug in the ch. 5 pins). After hooking that up to the ch. 6 pins on the receiver, and some tweaks to the “Mode” settings in cleanflight… we have an arm switch!!!
Now in my transmitter, ch. 5 is SwC and ch. 6 is SwB, yet SwB shows up as Aux 3 when programming in cleanflight… not sure why but if anyone else out there has similar issues and it seems like everything is hooked up but still not working when programming Modes, check the “Receiver” tab and flip all the switches around… that’s how I noticed it was Aux 3 not Aux 2 for me.
Just need some nice weather to finally try this thing out… Good ole’ Maine, USA is not ideal for outdoor test flights this time of year
Hi
Thanks for this article.
I have The Falcon 180 with the cc3d flight controller, I am using Librepilot.
I have rotated my board as you suggested as cc3d also has the usb inaccessible.
I am new to Drone flying so a friend suggested removing the motor tilts.
I would be so incredibly grateful if you could help me out with the settings I should use in Librepilot.
Thanks in hopeful anticipation.
Rich.
I removed my motor tilts as i found them annoying you need to purchase some m3x8mm bolts to fit the motors to the frame as the ones used now are too short, can’t help you with libre im affraid i got a naze32 on cleanflight, be patient with the falcon it takes some work to get it to fly right
hey there you guys I am new to drone flying and i need help I bought a falcon 180 rtf package and yet am able to fly it. I have done everything with the help from a friend I set up every thing on clearflight and the the whole thing with the remote and still nothing my drone wont take off the ground. Please help me fly.I really need all the help I can get I am a RC drifter and this is my time buying a racing drone so I don’t know what i am doing but i really want to fly so any help I can get is great. So basically the steering works the only reason I can tell its work its since the led bar the falcon has is turning every way and i see the led bar flashing but the throttle nothing the drone wont fly up. So idk what to do to fix it
Hi
Need some more info on this problem …
Are the motors turning at all?
Have you armed it?
Are the props on correctly? (writing on blades is facing the sky and correct rotation direction for each motor position)
Which flight controller does yours have? (depending on where you bought it and what you paid it could be CC3D, Naze32 or SP Racing F3)
Cheers
Steve
Hello, great write up. I am having one major issue. I have successfully connected to clean flight changed pids etc. when I power on qua the LED"s are solid blue. As soon as I turn on transmitter, the leds blink as if I was turning left. I have a SPracingf3 fc PLEASE HELP! Thank you


 ) do you have a conversion from your Decimal PID settings for the new whole number PID settings?
) do you have a conversion from your Decimal PID settings for the new whole number PID settings? )
)