I have connected a X8R to a CC3D flight controller with OpenPilot. When connected via the GUI and using the Vehicle Set Wizard, every thing works. When I try to make the motors arm they do not. I am unsure what connections are required from the Rx to FC and what mode to use. I would like to use one for the main channels.
Hi
Firstly you might want to rather use librepilot on your CC3D as openpiot seems to of died, so librepilot is where you will find all the latest updates going forward.
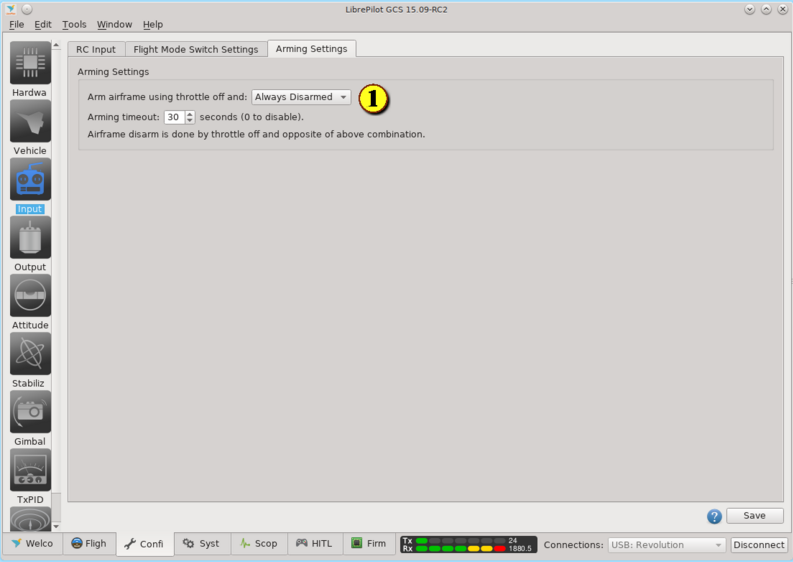
However if you use the app and go to Input section you will see a arming settings tab where you can see what method of arming you have set. My guess is that there is an odd arming method setup there.
Otherwise it could be something like one of the channels are reversed?
1 Like
All sorted but had to go back to 1 wire per channel, could fathom how to get the subs to work.
Was disappointed to find that the cc3d doesn’t support GPS hold or return to home.
Does the full NAZE 32 support these features?
Thanks for your help.
Yeah unfortunately because CC3D does not have a compass or barometer sensor build it you can’t use GPS position of altitude hold flight modes ![]()
However the full naze 32, the 10 dof naze 32 can be used with a GPS module. However if you prefer the cc3d/ librepilot GUI over clean flight then I suggest you consider the revolution board, as its the bigger brother of CC3D. Which also included dual way telemetry via the OPLink add-on board. It’s also got more GPS specific features such as waypoints. However I do beleive that cleanflight will soon add more GPS specific features.