Could anyone advise please? My grandson and I have been playing with toy and entry level quadcopters we started with a WL FPV and enjoyed the experience and captured footage, then a Quanum nova a bit disappointed in the reliability of the latter. So we have a F450 frame to which we have fitted 4 Sunnysky Angel 980 kV motors and 4x 30A ESC and 10/45 props. I have purchased a CC3D flight controller with case through Ebay. We would like to end up with a quadcopter that has GPS, RTL auto hover, and to be able to use a turnigy SJ4000 camera and gimbal. We have the Cheerson/Quanum TX. My question is what more do we need to achieve our aim and is the Transmitter useable for this purpose? If you can help it would be much appreciated and any suggestions of types of reciever etc. I have a spare frame and plan to build another when we have gained build experience so we can fly together. Thanks in advance
Welcome to the forums, and happy to hear you are building your own quadcopter, always the best way to learn in my opinion 
The F450 frame is a great starting frame and the motors/ESC you are using all seem fine.
In terms of the CC3D, do you know if yours has a built in barometer as this is something that is fairly important when it comes to altitude hold. Without it the altitude information only comes from GPS which is not very accurate (in terms of cm accuracy anyways). However the only extra thing you will need to get for the CC3D is a GPS/Compass module. The openppilot/CC3D wiki talks about how to get this all setup so you can use the features like RTL etc…
The Cheerson TX should be good enough for your quadcopter as it has the required channels to allow you to change flight modes so I would stick to that for now. As you get more advanced you might find that you will want to upgrade your radio to something like the Taranis, but there is no need to do that right now.
It would be great if you can share your progress/pics as you progress with your quadcopter build. And if you ever have any questions just ask on teh forums and myself, or someone else will be happy to help 
Wow! that’s service  Thanks for your swift reply. Could you tell me how to determine if the CC3D I purchased has a barometer? Also could you tell me If I use the Quanum/Cheerson TX do I need a dedicated receiver or will it bind with any automatically? If you have a suggestion I’d be grateful I love building but I would sooner build it properly first time and choose to upgrade, rather than waste cash buying unsuitable parts or things I don’t need! Is there any info on running a gimbal from the CC3D. I like the fact that I can use the rotary pot on the Cheerson to operate the gimbal Again thankyou for your kind assistance 63 and still enjoy learning. I surely will post some photo’s of the build
Thanks for your swift reply. Could you tell me how to determine if the CC3D I purchased has a barometer? Also could you tell me If I use the Quanum/Cheerson TX do I need a dedicated receiver or will it bind with any automatically? If you have a suggestion I’d be grateful I love building but I would sooner build it properly first time and choose to upgrade, rather than waste cash buying unsuitable parts or things I don’t need! Is there any info on running a gimbal from the CC3D. I like the fact that I can use the rotary pot on the Cheerson to operate the gimbal Again thankyou for your kind assistance 63 and still enjoy learning. I surely will post some photo’s of the build
Most CC3D boards don’t have a pressure sensor, but if you look at the actual board you should see something that looks like this:

Otherwise you should just check the specs of where you purchased your cc3d.
You will need to take the receiver out of your CX10 and use it on your new quadcopter. This will work fine for your drone, but will be sometihng to upgrade at a later stage as I am not sure what brand the CX10 uses. What lots of people have done is actualy just swap out the flight controller from the CX10 with something like an APM2.6 to give it better features are reliability.
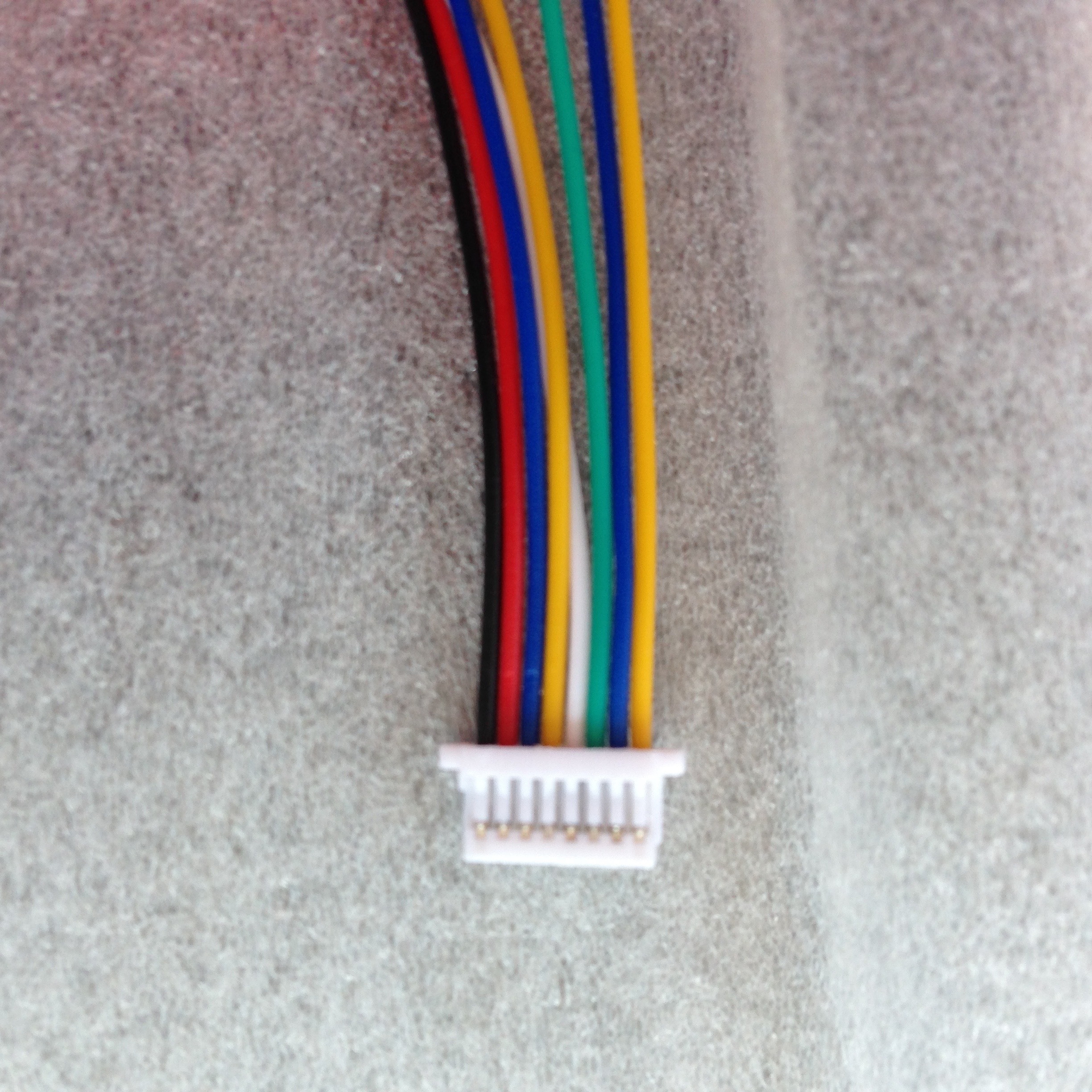
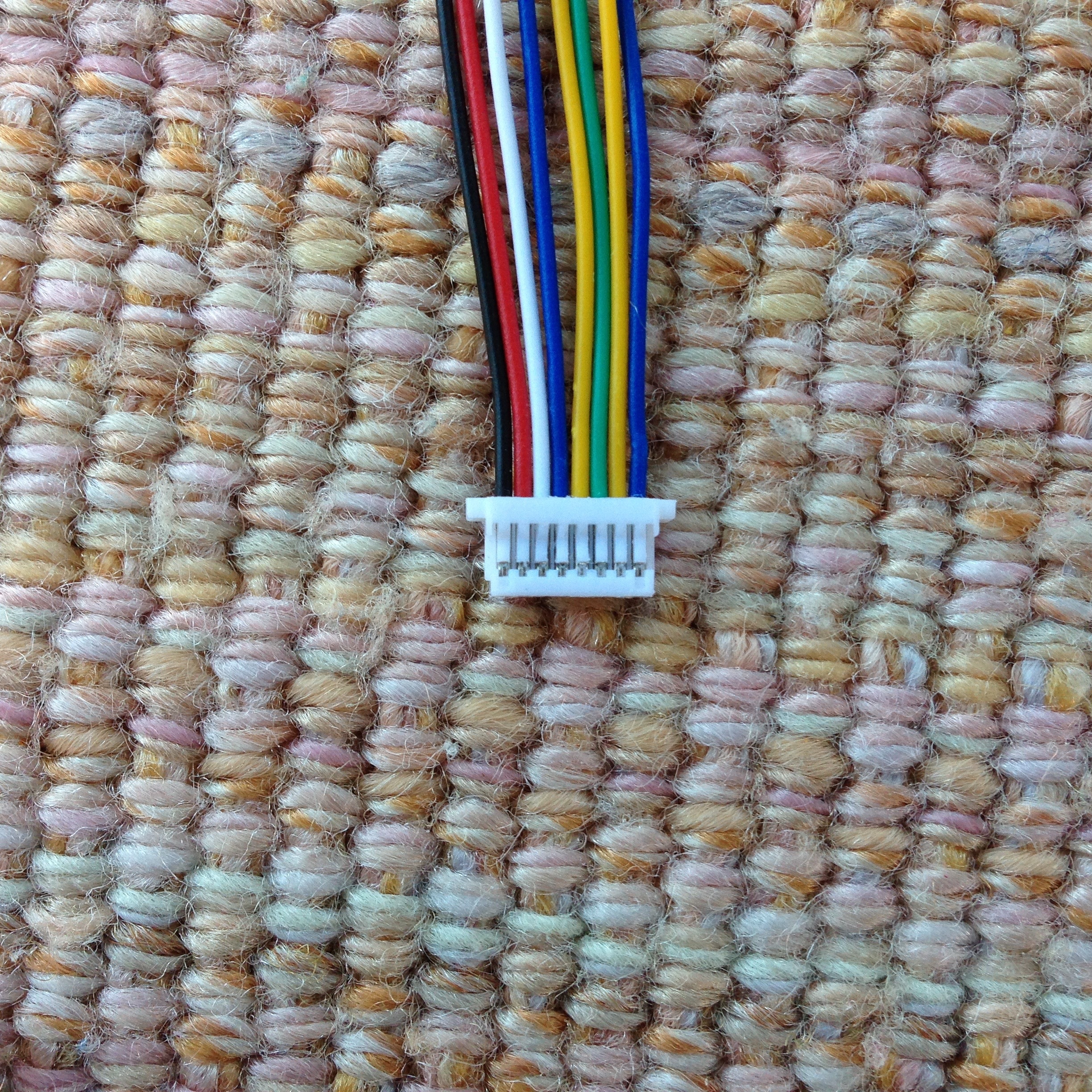
I Just thought that this may prove to be of interest to someone? I have recently purchased 2 CC3D flight control boards through Ebay I noticed that the wiring on the plug that links the flight control board to the receiver differed not just in colour coding but in the sequence. Most importantly the white signal wire from terminal 3 was actually wired into terminal 5 see pics. I am not an electronics engineer but I have read some cases of Chinese CC3D boards not working or failing could this be the reason?? I guess I have purchased ( in-advertantly) a knock off version so anyway I contacted my supplier and sure enough the picture they sent me matched all the others I have seen on forums. Now I understand that colour may not be important, but relative pin location is, The 3 way with Neg/Pos/Signal should supply terminal 1 2 and 3 in that order, however on the one I was supplied with - + sig were 1 2 and 5.
I must stress I’m no electronics engineer so I cannot accept any responsibility for loss damage or personal injury however I think the lesson is never take it for granted that someone else did their job correctly. I haven’t tried this yet so wish me luck and if it helps some one to avoid trashing a board then I’m happy. It was a simple matter to pull the offending wires from the plug and re-arrange them see photo’s

Thanks for sharing that , its a great tip and an relatively easy solution (all be it abit fiddly). It seems that some manufacturers just try to make the cheapest version which can be great for our hobby opening it up to more people but some of them have the wrong cable layouts (like you have experienced) as I dont think many of them bother to ever check this  .
.