
I don’t believe so, I haven’t touched them but I think the previous owner has configured them
I don’t believe so, I haven’t touched them but I think the previous owner has configured them
When you updated to Betaflight 4.2 did you do a full chip erase? also did you paste any of your old settings into the CLI?
On the setup tab on Betaflight if you tilt and twist the drone does the model on the screen do the corresponding moves?
I did a full chip erase, then I had trouble working it so I asked the owner for the latest backup he had and worked from there, changed things till it worked
Yes, the drone does after I calibrated the fc properly
The heading always shifts by a degree a second, not sure if that normal
I would make note of motor protocol, serial settings for receiver and FC orientation then load defaults and try setting up again manually. You have potentially copied a setting that isn’t happy with 4.2
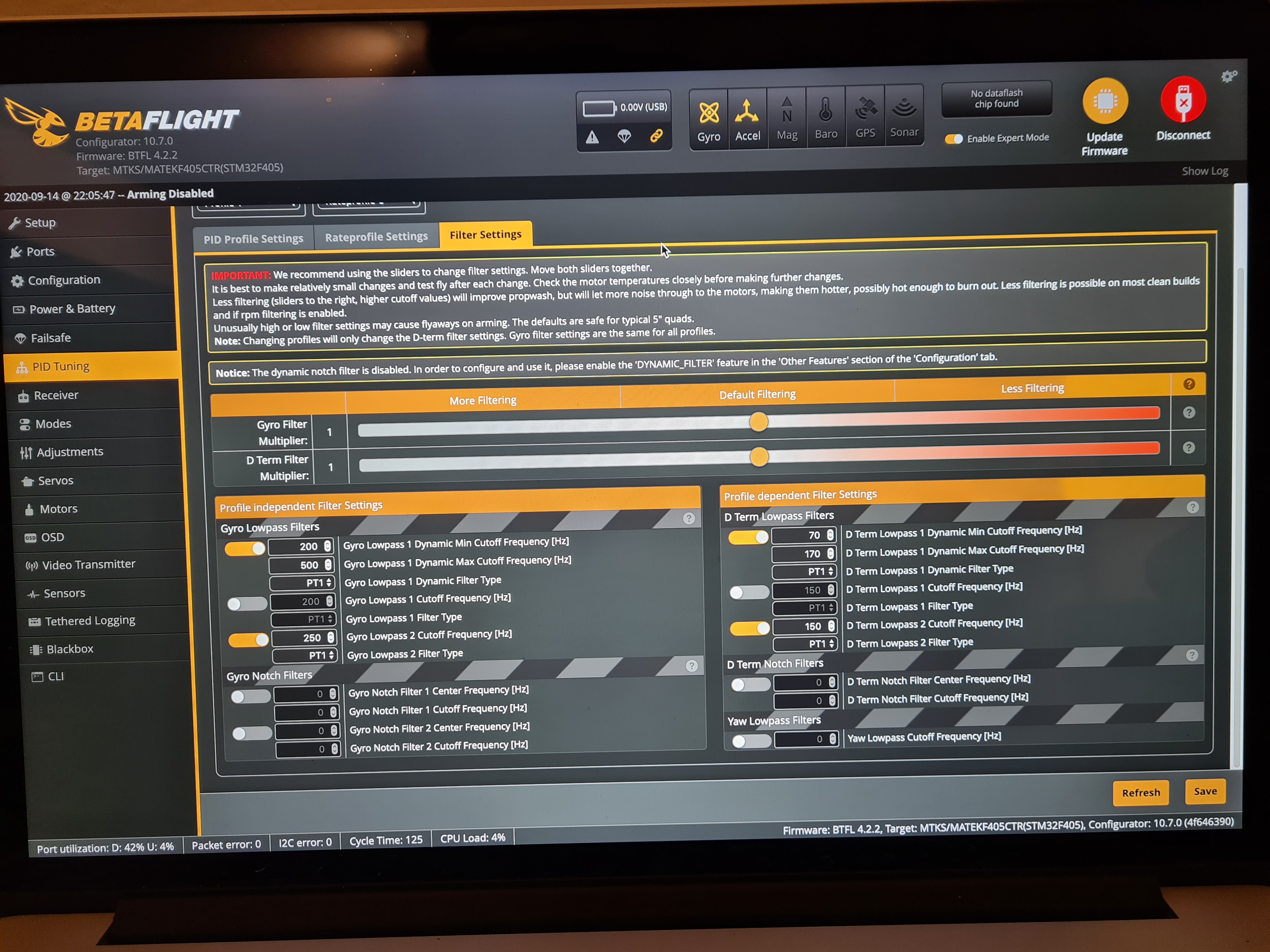
After that if its the same try these settings

I will get onto that, thank you!
Ok so I found something interesting, when I arm the quad the accelerometer thinks the quad is pitched forward, any idea what that is?
calibrate accelometer while drone is flat on table , you can do this either by betaflight setup page ,first page that opens, or just power quad and transmitter up and at the same time move the left stick up and to the left and the right stick down, make sure quad is flat the LED on FC will flash fast when calibrating. you only need to move sticks to the said positions for a second.
also if you have battery at bottom and the quad tilts above 25 degrees it wont arm even if calibrated, well not in sissy mode anyway.
if the arm angle is set to 25 degrees its a good idea to set to 180 degrees this help to remove quad from trees because it will arm whatever direction its pointing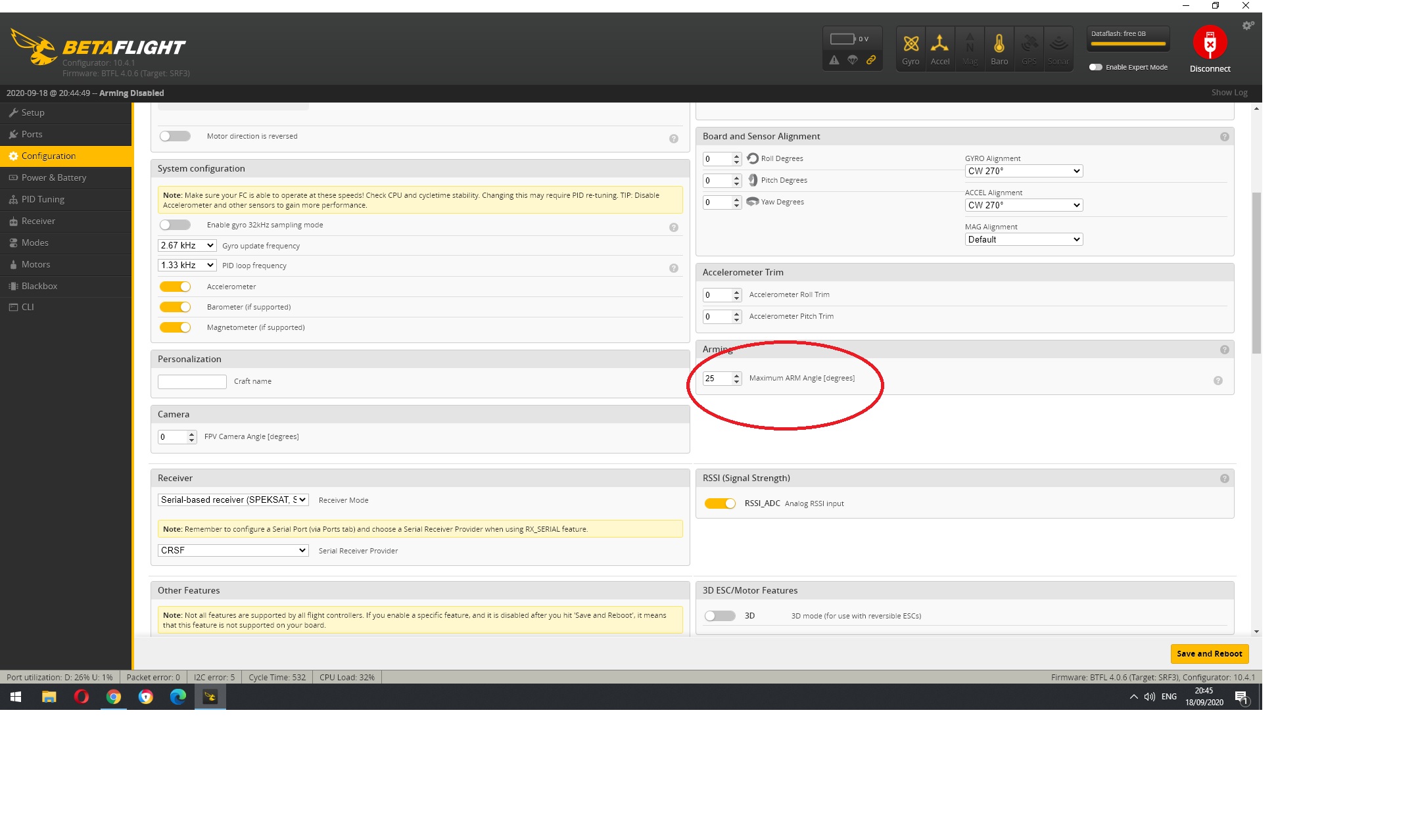
1 Like
i calibrated both ways and shows accurately until the drone is armed and the motors spin up, then I automatically pitches forward
Did you calibrate your Escs?
Do always the same motors spin up?
1 Like
i calibrated both ways and shows accurately until the drone is armed and the motors spin up, then I automatically pitches forward.
This doesnot mean the above. think we are trying to help when the description of fault keeps changing.
assume you havent got the problem that arr in the vid links above now.
just switch the accelerometer off and see what happens if it does the same thing , let us know the outcome.
1 Like
To date, Ive scrapped the old betaflight setup and revised it, the accelerometer issue is gone and quad flies but will randomly drop from the sky
I think it is a motor desync issue. From what i can tell currently the ESC is ok but the motor bearing is on its way out, going to replace it and see what happens
Thanks all for helping, Ive learned so much and more to go
I will get it flying!