Hi every body,
I m newly building a octorotor for a specific purpose but wonder something about frame reference. While using px4 or ardupilot, there are some airframe configuration and you should choose the proper one before calibration. In my case, i want to build an H frame octorotor but it does not seem support this configuration. My design has symmetric sides in roll and pitch axis. So the question is that i can choose X8 configuration on PX4 during setup or should switch to X8 frame kit? What do you think about that?
Or what do i face with if i build H8 and choose X8 conf.?
Note: As i think, there should not be any difference between them. Because the motors are exactly on the same point therefore moments and forces are supposed to be equal around CG. However PX4 flight stack gives different configuration at start up for H4 and X4 (does not support H8 currently)
Thanks in advance
Mehmet B.
Arducopter firmware supports Octa H frames, I cant recall if its an option via the setup wizard or not, but if not you will just need to set it via the manual parameters list (Frame Class, and Frame Type). But you should be able to select it without needing to do any custom motor mixing.
As for the PX4 Firmware stack (I am not very familiar with it anymore), but I dont see why it will not support this, so it is also just a matter of changing the value manually in the parameter list.
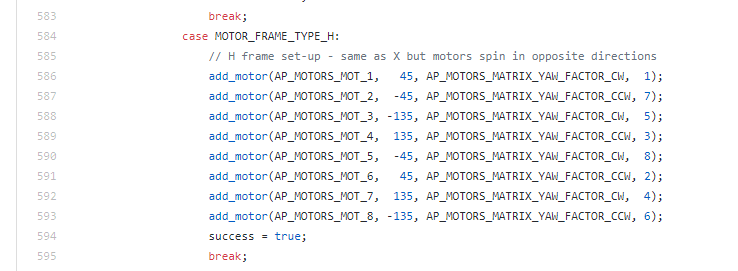
Thanks for the reply. I m not so familiar with the background of firmware but had a check. The set up codes (for the motor config file) are exactly the same for X and H in both quad and octo and configurable in PX4, too. At this moment, another point comes to the scene. Why do both setups seen on the frame configuration screen (i mean Quad H and Quad X)? This is a kind of prevent against mind confusing? And they are giving seperate choices to make it clear. Or they have something different on the firmware side?