i was silly and careless. the 8dr-xp came ch3-ch4 prejumped by the ground pins not signals. such calibrating and two way comunication problem was solved. sorry.
I will try to upgrade the firmware and i hope range problem will resolve.
i was silly and careless. the 8dr-xp came ch3-ch4 prejumped by the ground pins not signals. such calibrating and two way comunication problem was solved. sorry.
I will try to upgrade the firmware and i hope range problem will resolve.
Sure, happy to see you are making some progress 
slowly I give up to investigation of the range problem:-)
I changed radio receiver (d4rII to d8rxp) on the board but nothing will be better.
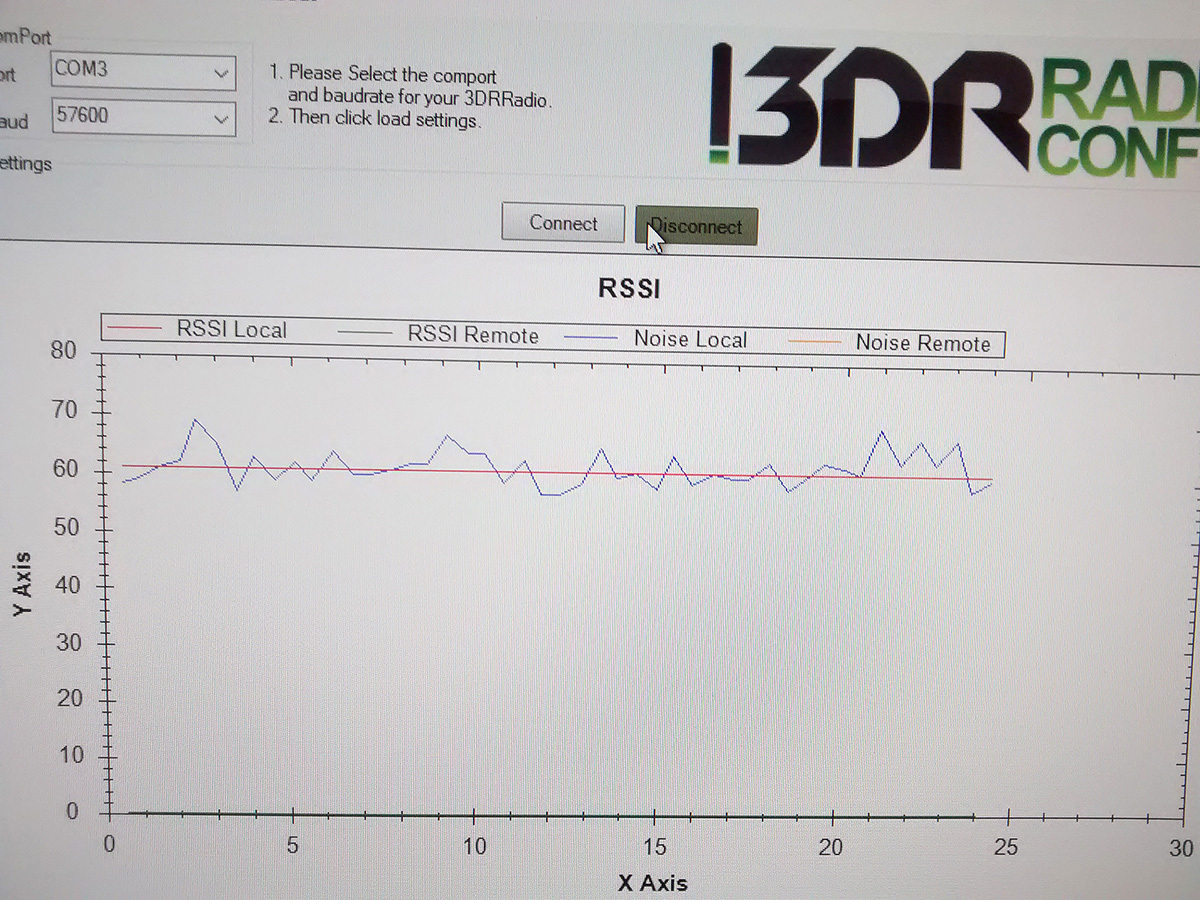
my radio rc shows RX 99% value if the rc near to the board but it is rapsodically changes if move it to farther places (99%->85%->65%->45% “beep”) in my house, it is about 80-100 meter in the field. I think there are some interferences between RC and 3dr telemetry or other problem. Further interisting that telemetry (sik radio) can’t able to connect android ground station… droidplanner women says.“data link lost check connections”. but no problem connect to a laptop and mission planner in the room.
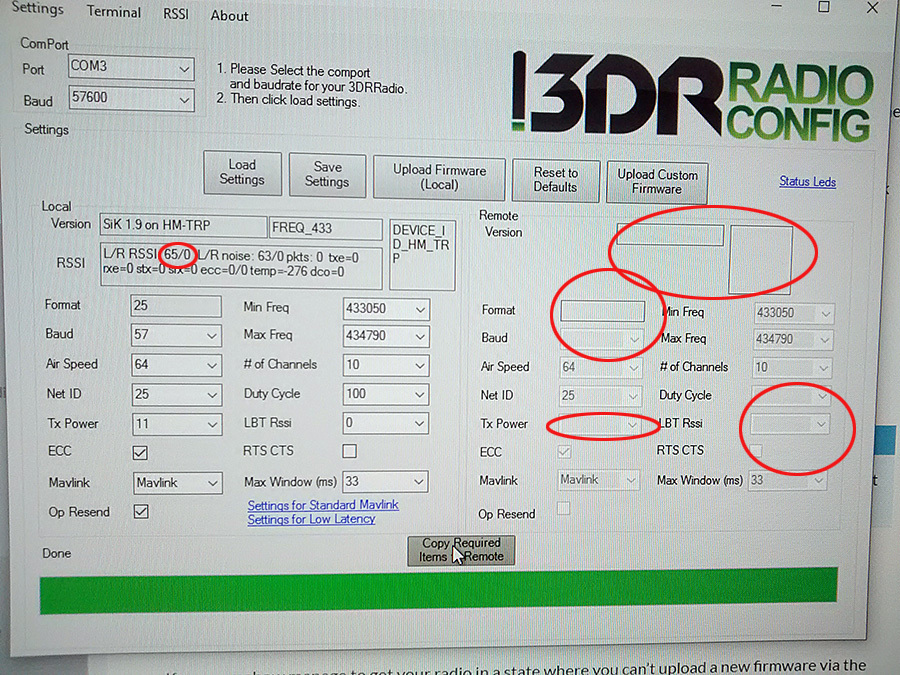
see these pics. I can not to copy all settings from right to left field. I marked this problematic cells…and strange the L/R RSSI and noise values.
any idea?
Hello,
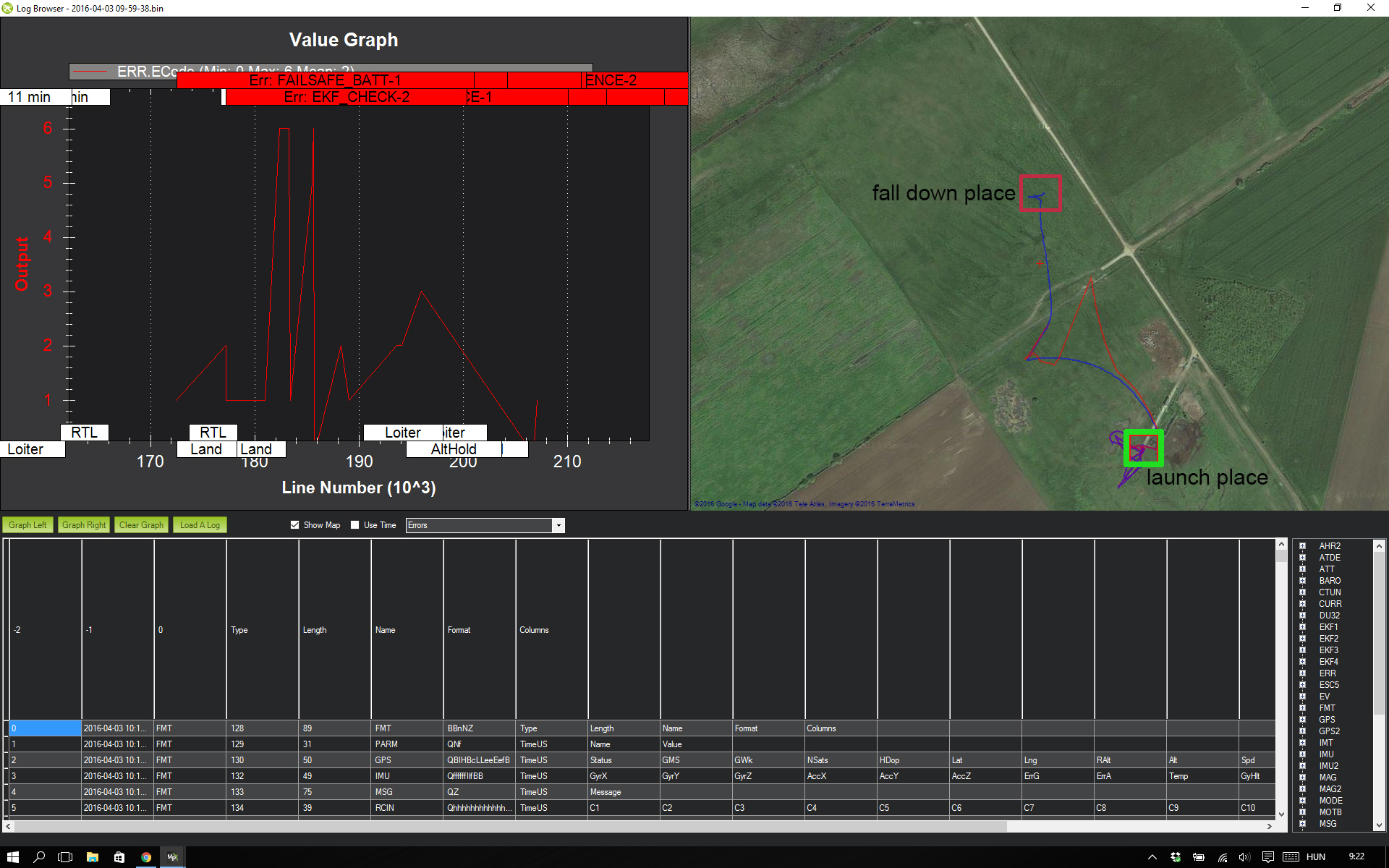
I’m very sad. my iris fell down as a piece of stone. here the whole story. yesterday was an beautiful weather, moderate wind, low K index etc. After calibrating my iris+ (at all not worry about range problem) I make some test flight around me inside 50m radius circle and in max 30m height. it seems everything is ok. the drone operated without problem. in one case (tested all of the rc functions) I switched “RTL”. The Iris started the programmed RTL routine normally and then (cca 1 m above launching point) the green status lamp suddenly change to rapid blinking yellow (with crisp beep) and started quick to raised itself and fly away. after crazy flyng he fell down (cca.250m away and the altitude were about 100m).
The gimbal totally broken and the upper cover cracked. I haven’t known further problem yet. I think it were battery failsafe problem, but I dont understand the behaviour of the iris. He were in landing mode and after switching batt failsafe he out of her mind. I tried to control the crazy running but the control totally lost.
Why did he to became crazy? regarding to the failsafe settings reached to 10,5V he had to switch RTL and landing. He didn’t, he fly away (I thought maybe he wanted to go my house). Other question is: any failsafe mode overwrite any order from rc or in other words how can to recover the control avoid similar problems in the future?
(I measured 9,5 battery voltage after crashing. what do you think battery may survive this voltage level?)
later I download the log file and attached here maybe somebody will help me. what was happened exactly?
here is the log file but the zipped form is too large (little bit more than 4 mb). may i send it to an e-mail address?
I wolud be so happy if anybody would be so kind to examine it.
I see that there were either (at first) BATT Failsafe and EKF…but the main question is: why didn’t do the failsafe (RTL) routine instead of he was flying away?
thank you
(it seems electrical components survived the falling except tarot gimbal)
I suggest this first thing you try is to run the auto analysis of the log file from your flight as that will check for common errors such as compass variance, power brownouts, or sensor issues and usually gives a good idea of where to start.
Dear Alex,
I examined the log. When the problem occured two failures appeared one after another. 1. Battery failsafe (failsafe was set “RTL”) 2. (I’m really worried about this) EKF_CHECK_2 and FAILSAFE_EKF-1.
How can i avoid this problems? I don’t find really clear advice how to set any related params.
You are right Alex!
log analysis says: compass may caused EKF problem (I think…iris lost his good orientation)
on this day it was the 4th launch and iris fly with no problem. My question is? how can I avoid this suddenly arise problem and get back the control? 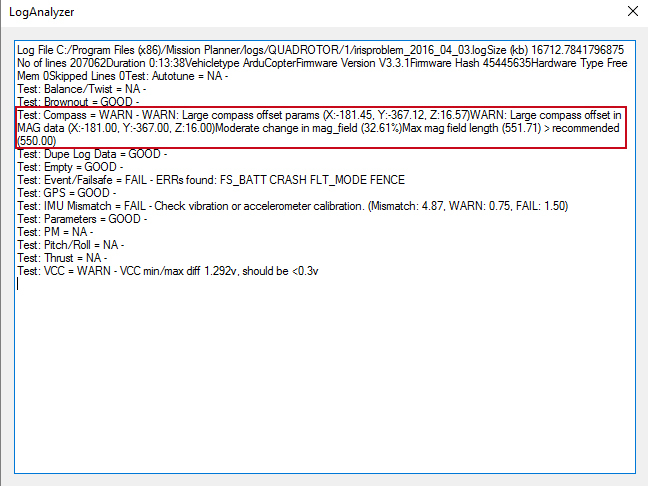
If you can look back at some of your other logs you might find that there was a few warning messages as I dont think its something that will suddenly cause a crash (unless you moved or mounted something new on your drone)
If you have bad compass offsets then you should try to mount your GPS/Compass module further away from the motors/ESC and power wires. Also make sure the cable connecting the GPS to your pixhawk is not crossing any battery wires. Also twisting your wires can help reduce EMF.
Thanks Alex,
I will examine your proposal. I added new gps (M8N from you) with mass mount. original Lea 6 unit damaged thanks to the crash so M8N can operate alone. Am I correct that pixhawk has compass and other one is in M8N? Maybe it may cause problem thanks to wrong settings in params. (marvelous the open source but not for novices. hard and long way to keep clear the glass)