Solved! There is something you can do that doesn’t require sending the Pixhawk back.
After months of trying to describe my problem to people, I finally dug into the Copter code. Here’s what I posed on the Ardupilot Forum:
Well, OK, I think I solved this issue.
I spent a few days going through the APM Copter code and found the:
AP_SerialManager.cpp
file. Down about 1/2 way are some lines:
state[1].uart = hal.uartC; // serial1, uartC, normally telem1
state[2].uart=hal.uartD; // serial2, uartD, normally telem2
state[3].uart=hal.uartB; // serial3, uartB, normally 1st GPS
state[4].uart=hal.uartE; // serial4, uartE, normally 2nd GPS
All I did was swtch hal.uartB with hal.uartE so that uartB is the 2nd GPS and uartE is the 1st.
I think this whole cpp file is where the firmware sets what serial ports are doing what.
So, I saved that and compiled a new firmware and uploaded to the Pixhawk.
Success, so far.
The telemetry on my FrSky Taranis comes up with coordinates, now! The GPS (same 3DR/ublox GPS) now is more stable and wanders (dithers) less. Drone can fly in loiter mode now.
Solved…?
I know there are a number of people who are being told by 3DR to buy another Pixhawk, but this clearly works and is free. Granted, you’re not going to be using a 2nd GPS.
With a broken GPS (Serial 3) header, you can indeed connect your 3DR uBlox GPS to the Serial4/5 header. You can change the protocol and baud rate of Serial4 to match the GPS settings of Serial3 (this is indeed the default setting in the code for Serial4).
Good:
Your GPS will fire up, and the position will be reported through lat2,long2, etc… Yeah!!!
You can do ‘auto’ planned missions.
Bad:
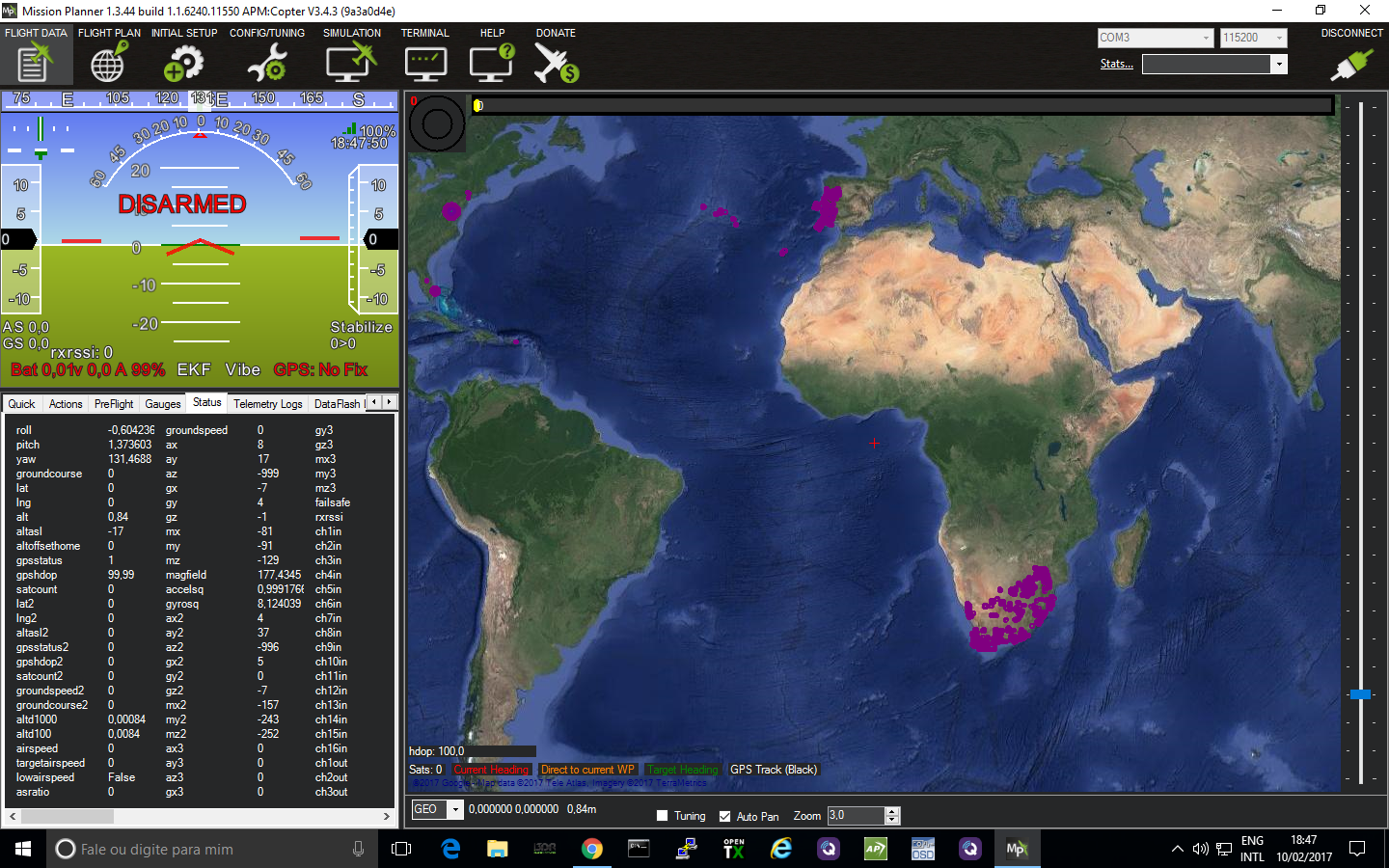
However, in the Flight Data part of Mission Planner the GPS Fix indicator in the HSI with continue to indicate “No Fix”. And give no GPS Fix Data (numSats, 2D/3D, etc…).
Several flight modes don’t work well.
The position of the GPS dithers much more (I cannot understand why this happens).
If you are using a Teensy 3.1 to take the MavLink Data from Telem1/2 and transmit that to your Taranis, it won’t transmit any coordinates to your RC.
Altering the code in the way I did fixes the problem!

 the GPS port for you.
the GPS port for you.