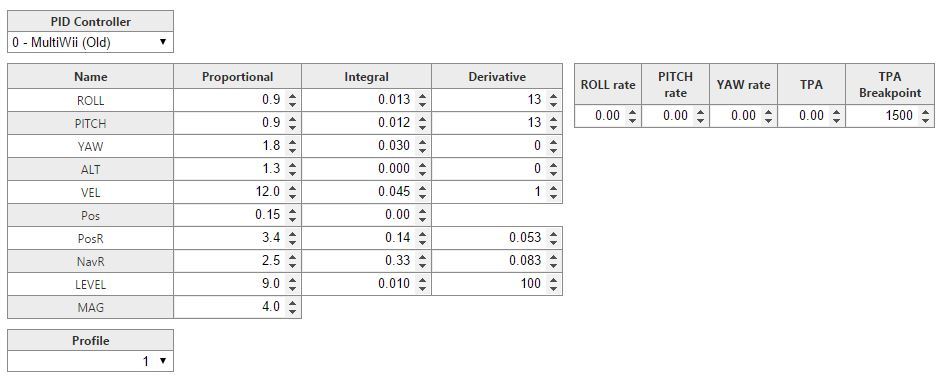
After playing around with the PID settings on my MicroX X160 quadcopter, it got to a point of it being very hard to control, but now I cant seem to remember what the initial /factory PID settings are. I used the fedault PID settings with cleanflight which help, but they are still sub optimal for my quad. Can anyone please share the factory PID settings for the mini frame that I can use?