My GPS (Ublox lea-6m) works fine when I try to loiter and return to launch. APM disagrees and throws failsafes randomly (usually about 3-6 minutes into the flight, I don’t think brownouts are happening but maybe that’s the solution), probably due to GPS and then uses GPS to RTL anyway. How can I stop it from throwing this failsafe? (or my problem different than I think?) The only failsafes I set up are battery failsafe (battery was fully charged and battery monitor was working) and throttle failsafe (my transmitter and receiver were working fine and I was flying it right next to me, not out of range. In fact, I could control it as it was RTLing) Here is the log file:
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (2.88%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = FAIL - Min satellites: 0, Max HDop: 2.02
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
Have you confirmed you are able to get a reliable 3D position fix when the quad is on the ground connected to your PC with a clear view of the sky?
Yes, loiter seems to work just fine. I don’t have a wireless USB link though, so I can’t connect it to my PC while it’s flying.
Hmm could you run the autotest for one of your flight logs where loiter was working correctly, as the last test results you posted show the GPS module not working at all?
The problem last time was the compass apparently, not the GPS. I did the compass motor calibration (which I have now dubbed the “miracle calibration”) and it worked. Here’s my most recent auto-analysis:
Log File C:\Users\Matthew Moore\AppData\Local\Temp\tmpB605.tmp.log
Size (kb) 835.05859375
No of lines 12831
Duration 5 days, 20:43:10
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 1
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (10.84%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: CRASH GPS
Test: GPS = FAIL - Min satellites: 0, Max HDop: 99.99
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = WARN - VCC min/max diff 0.355v, should be <0.3v
Here’s another:
Log File C:\Users\Matthew Moore\AppData\Local\Temp\tmp7181.tmp.log
Size (kb) 337.6318359375
No of lines 5228
Duration 22:03:30
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 1
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (2.88%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = FAIL - Min satellites: 0, Max HDop: 2.02
Test: IMU Mismatch = UNKNOWN - No IMU log data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
Can anybody help? I’m worried this thread is going to become “dead.”
Hi, we will help get to the bottom of this, but you will probably need to look at the logs in abit more details as the autotest is not realy revealing anything obvious. Also does the problem occur only in loiter/RTH flight modes?
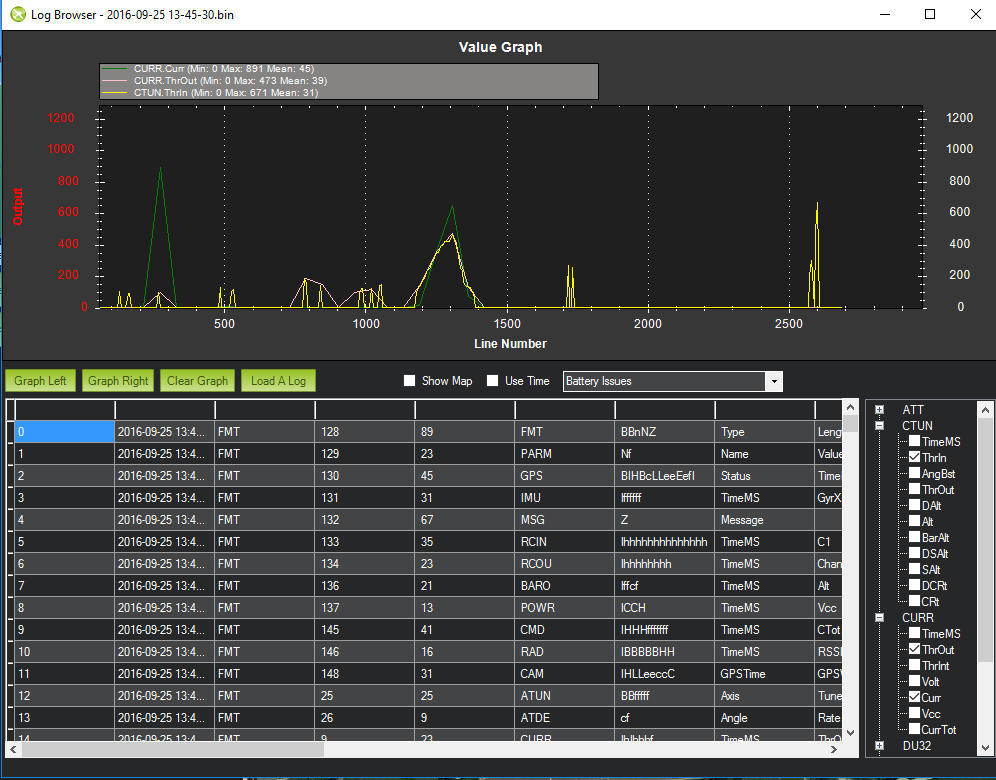
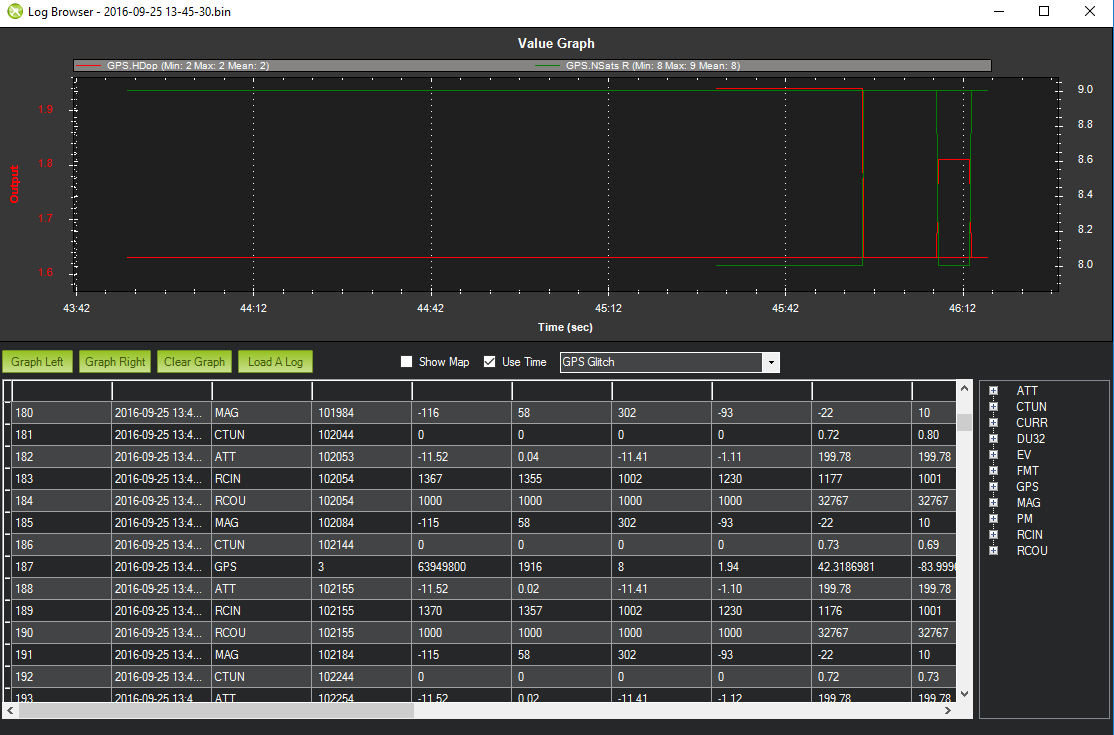
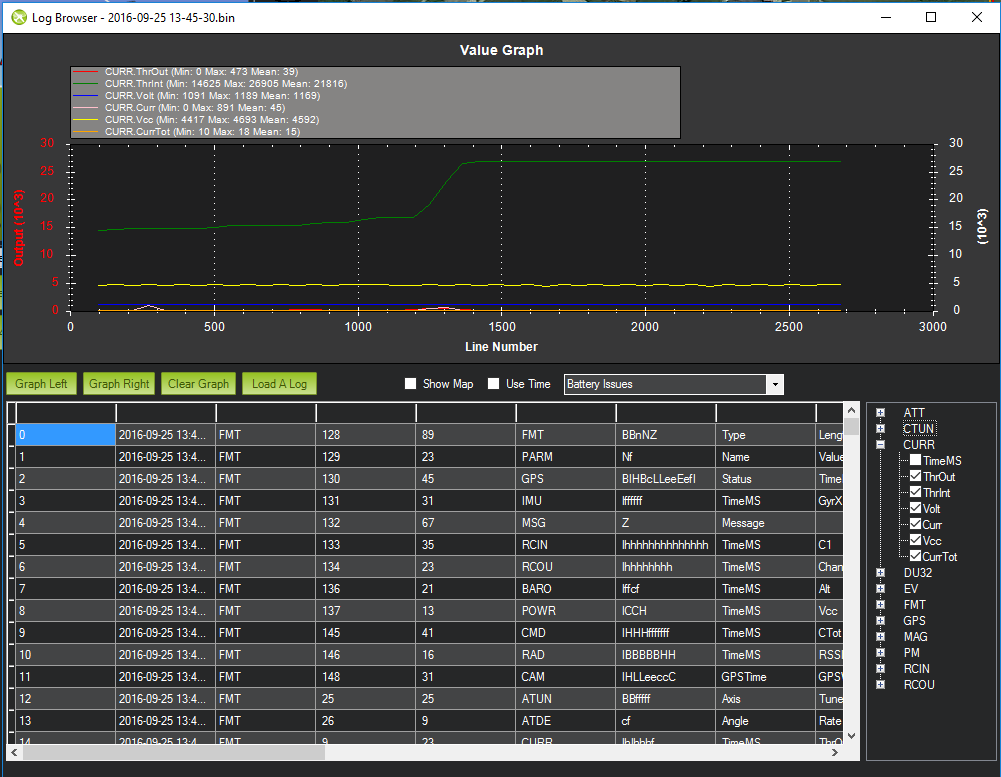
You should look at is to graph ThrOut vs Vcc to make sure you are not having any power issues on your arducopter. You can also try look at GPS HDOP values/sat count vs failsafe triggers in the logs to see why it is triggering.
One thing you might want to do it try if the logs dont show anything is to perform a a factory reset and start again (if you have the motivation to do that) as I have had some unknown issues before and after the reset it all works well again.
Thanks! I’ve noticed the problem happening in manual flight mode but I think it happens in any other flight modes too. When I connect the APM to my PC it almost instantly gets 9 satellites with HDOP around 1.9, so I don’t think that’s the problem but then again maybe I’m not waiting long enough after turning my APM on before taking off. How can I graph ThrOut vs Vcc like you said? And also, how do I look at log files without auto-analyzation? I could send you one of the .log or .bin files if you want.
Nevermind, figured out how to do it. Here are the graphs. Anything look fishy?
Hey those look OK but I’m on my phone right now and screen is way to small to see what is going on so will try look tomorrow, got a bit of a busy week so if I don’t get back to you in a day or so feel free to remind me 
If the graphs look ok, why do you think it’s having the problem? Do I need to do the (dreaded) factory reset?
Yeah it might look like tha  t, but if you want to spend abit more time looking at the logs there is a fairly nice guide about how to do it on the arducopter wki
t, but if you want to spend abit more time looking at the logs there is a fairly nice guide about how to do it on the arducopter wki
I’ll do the factory reset, but first I want to know if there’s any way to find out what caused a failsafe. Can I do that somehow with the logs?
I can’t recall off hand as I’m not at my pc right now, but there should be a failsafe option to view one the parameter tree list on the right of the telemetry graphing page within mission planner.
I just tested it and it has the exact same problem as before. Are you on your PC now so you can check how to view failsafe cause? (When I looked I didn’t see anything but maybe I’m missing something.) Also, viewing what caused the failsafe won’t help the problem in and of itself. Is there anything else I should try besides returning the APM and trying a new one?
You still there? Just reminding you that this thread exists