Hello, and thank you for your answers.
Yes the “EAGLE EYE DSLR BL Aerial Gimbal (32Bits
Controller)” will be installed on
a real airplane (ULM.
The pictures will be taken at a speed of 80 km/h and the maximal speed of the
airplane is 150 km/h).
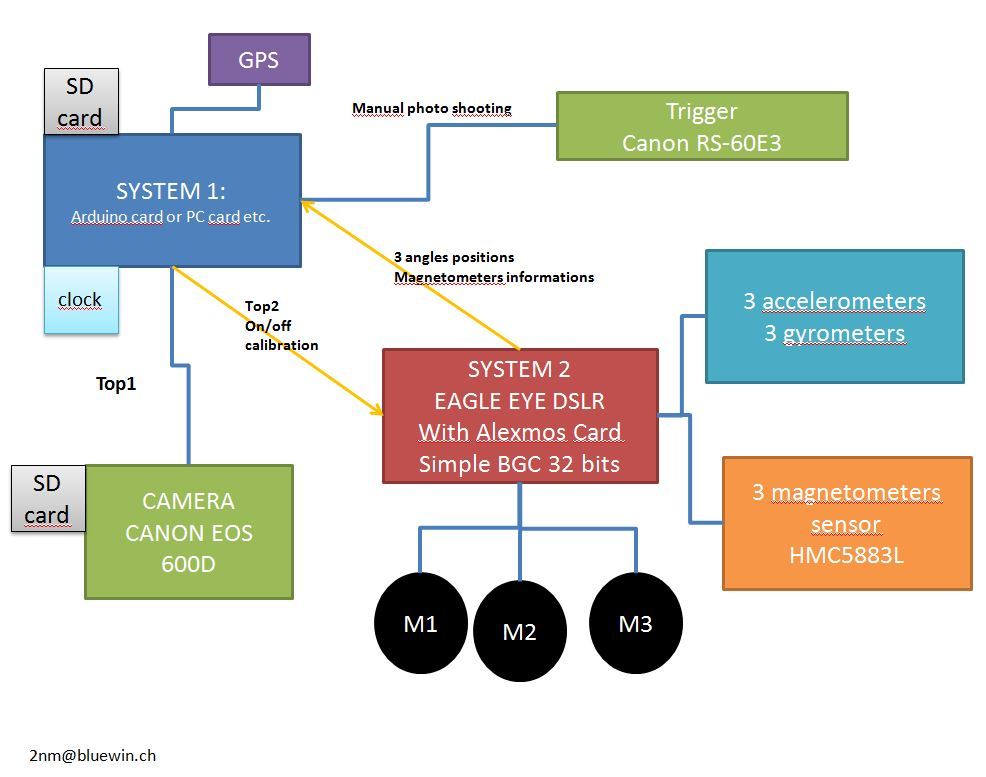
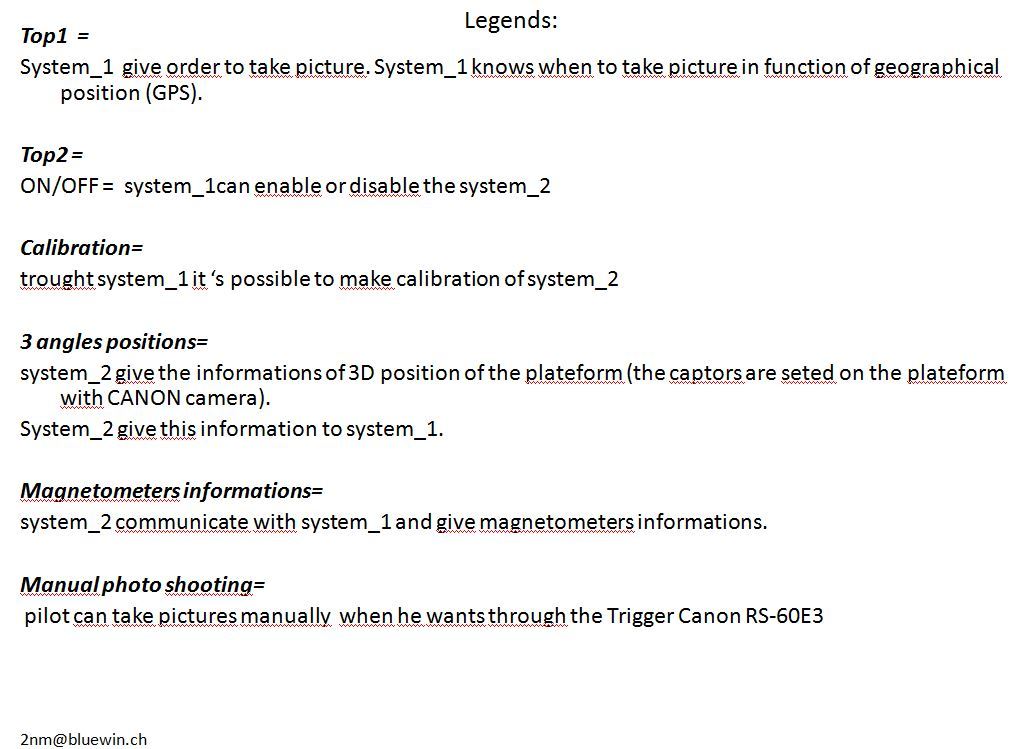
The camera has to point at the ground and has to be oriented in direction of geographic North when it will take pictures.
I have found this GPS on internet: “Adafruit Ultimate GPS Breakout - 66 channel w/10 Hz updates -
Version 3”
The “EAGLE EYE DSLR BL Aerial Gimbal” is
sold with a “3-axis 32bit AlexMos controller including
IMU sensor”.
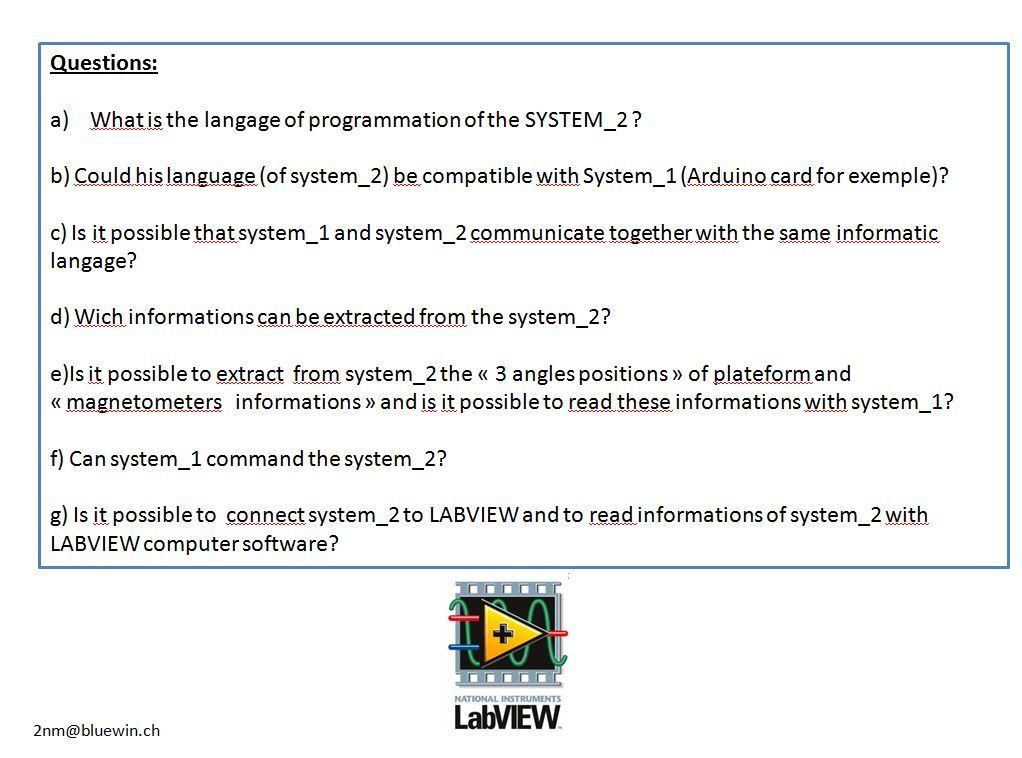
Do you think I can
connect the “Adafruit Ultimate GPS
Breakout” with the “3-axis 32bit AlexMos controller including IMU sensor”?
Somebody told me that I can not
connect GPS to SimpleBGC controller. But that I can connect it to my own controller what
will manage all process of geotagging. Is is
true? Do you know what model of microcontroller I have to buy and is compatible
with the “"3-axis 32bit AlexMos controller “?
http://www.basecamelectronics.com/serialapi/
I have heard that it exists encoder (motor’s shaft rotation).
(you have to put WWW at the begins, problems with this forum about internet links …)
Is it possible to adapt encoder on each electrical motor of the EAGLE EYE DSLR BL
Aerial Gimbal?
(The « EAGLE EYE » contains two models of motors: BGM5208-75 and model BGM5208-180-12).
Sorry but I understand nothing about “However in terms of georeferancing
your imagey
you might want to consider connecting an autopilot such as APM with a GPS
module to your camera, as the ardupilot
can control your camera to take photos and record the GPS position, altitude
etc of each photo you take. The APM module also includes a 3 axis magnetometer sensor”. My level is not so
high.
Yes for each picture, the GPS position, altitude and the
time have to be recorded. Do you think it is possible to connect an internal
clock with the microcontroller? (the clock need to be very accurate hours,
seconds and tenth of a seconds have to be given).
For this project i have to answer CDCF (about like wishlist): pilot can take picture with the remote control of the canon
EOS 600 D when he wants.
But before tkake-off I want enter the parameters and then, during the flight, with the help of GPS the
system takes automatically pictures every X seconds depending the evolutions speed of the airplane (speed is not constant during all the flight), the
altitude, various accelerations ( according parameters entered before take-off).
Yes help is welcome because i am beginner in this technical area. (This is not a commercial project but school project, i am still student)
Best regards
Politon