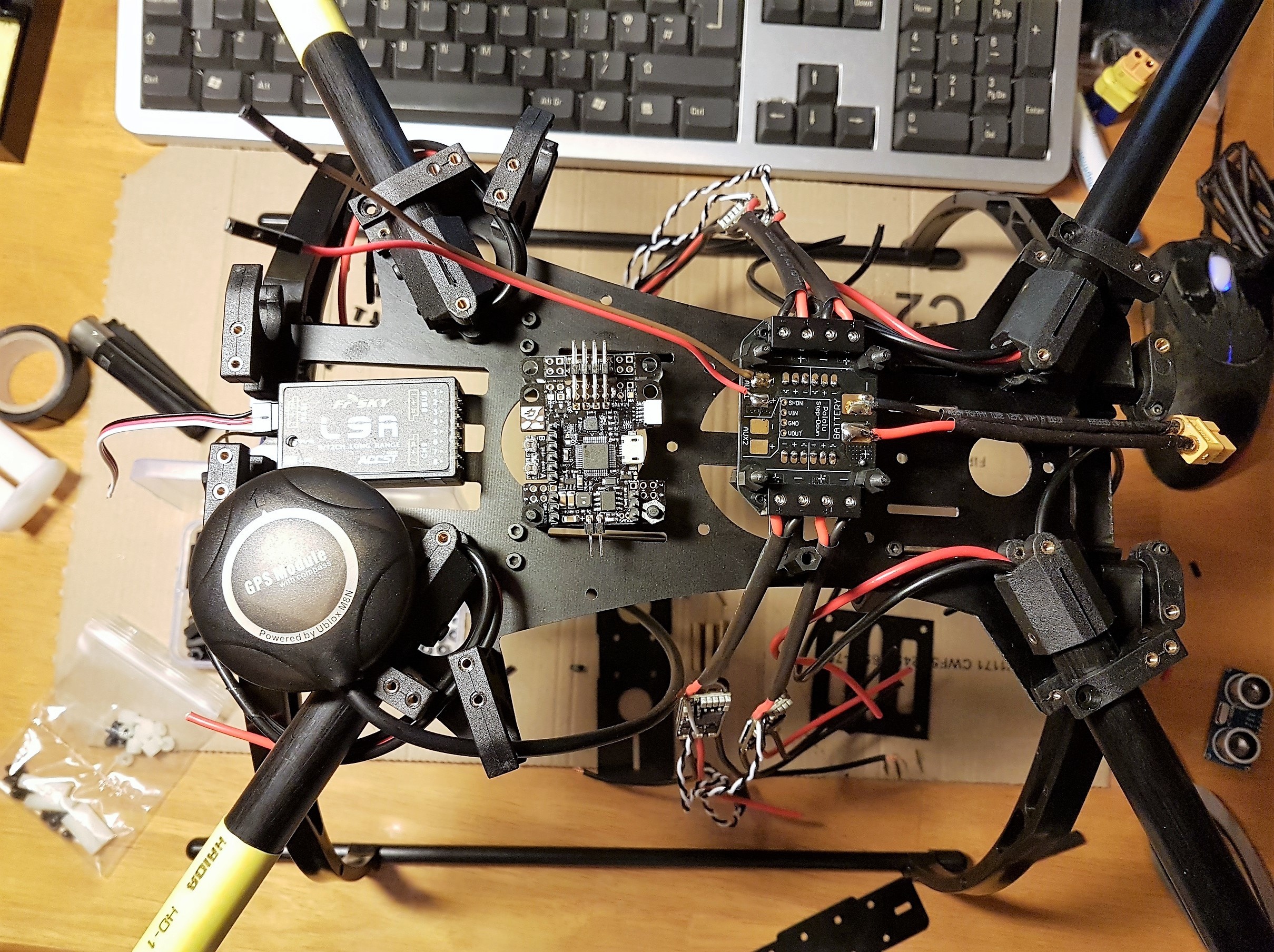
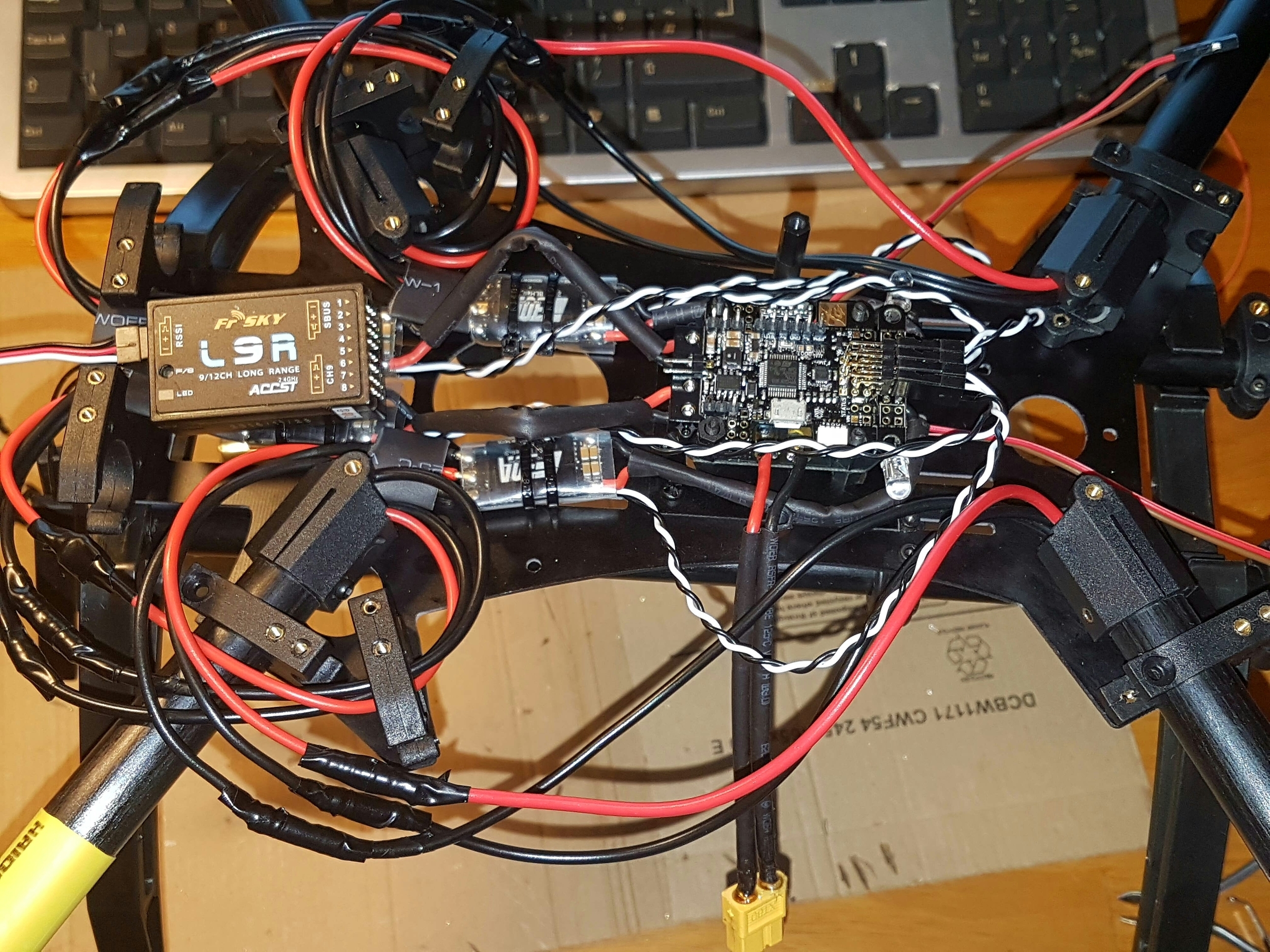
Hello everyone, its my first build, and I’m seeking help and advise on how to power SP racing f3 mini correctly with power distribution board . I am using 4s lippo battery 14.8V.
and also if you dont mind to help me out to connect the rest of the equipment. Like GPS module (UBLOX M8N), receiver (FrSky L9R ) and standard ultra sonic sensors. Any help appreciate. Thanks
Are you planning to just use the GPS for OSD info or are you planning to use it for position hold functions? If so then you need to make sure your SPF3 board has a built in compass module? If it does then you can use it but will probably not get very good position hold as the onboard compass has lots of inteference.
Its best to use the compass on the external GPS module, but then you will need to connect it to the i2c ports on your FC (SDA/SCL pins) and you will then need to disable the built in compass on the FC by cutting the traces, as I dont know if it supports 2 compass at the same time yet.
Also within CLI you will need to tell it what orientation the compass is:
0 driver default
1 CW0_DEG not rotated or flipped
2 CW90_DEG rotated by 90 degrees (Z axis), not flipped (X axis)
3 CW180_DEG rotated by 180 degrees (Z axis), not flipped (X axis)
4 CW270_DEG rotated by 270 degrees (Z axis), not flipped (X axis)
5 CW0_DEG_FLIP rotated by 0 degrees (Z axis), flipped (X axis)
6 CW90_DEG_FLIP rotated by 90 degrees (Z axis), flipped (X axis)
7 CW180_DEG_FLIP rotated by 180 degrees (Z axis), flipped (X axis)
8 CW270_DEG_FLIP rotated by 270 degrees (Z axis), flipped (X axis)
Otherwise best is to rather use a Pixracer flight controller as its designed for GPS module/waypoint flying, whereas SPF3 is more for racing.