Hi guys,
How do i wire up my Omnibus f4 v5.1 to Dragonlink micro rx to get telemetry from it.Dragon link micro rx has UXEP port.
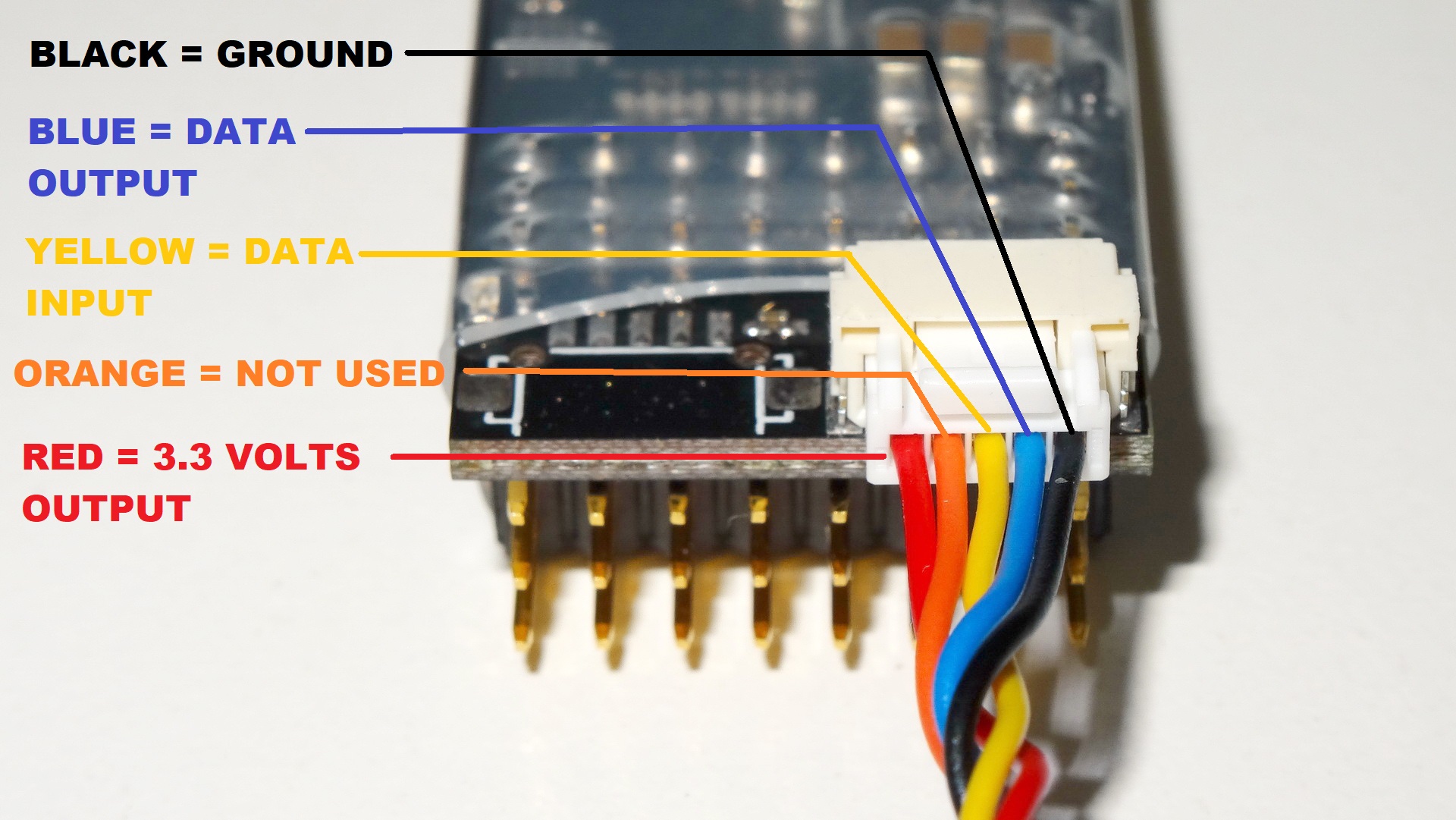
Which wire to connect to V5 board and where is the right pins and how to configure it.
Thanks
Which firmware are you running on your omnibus? I imainge it would just hook up to one of the spare UART ports (not the one one used/shared by the SBUS pin).
But I cant offer much more help since I dont use dragonlink, and am not even aware if betaflight supports their telemetry protocol.
You need to configure the Receiver with the Dragonlink Gui.
In the Gui you need to select the port that you wanna use for telemetry.
Connect your chosen port to a spare UART Port and off you go…
Luca 
1 Like
Thanks for quick reply.
Im using F4Pro firmware.
Thanks man.I already configure in DL Gui before using and hook up gps on UXEP poert(but not full telem.)
In this case,where do i connect TX and RX from DL to Omnibus pin? and how to configure the inav configurator.Can i get full Telemetry from omnibus?
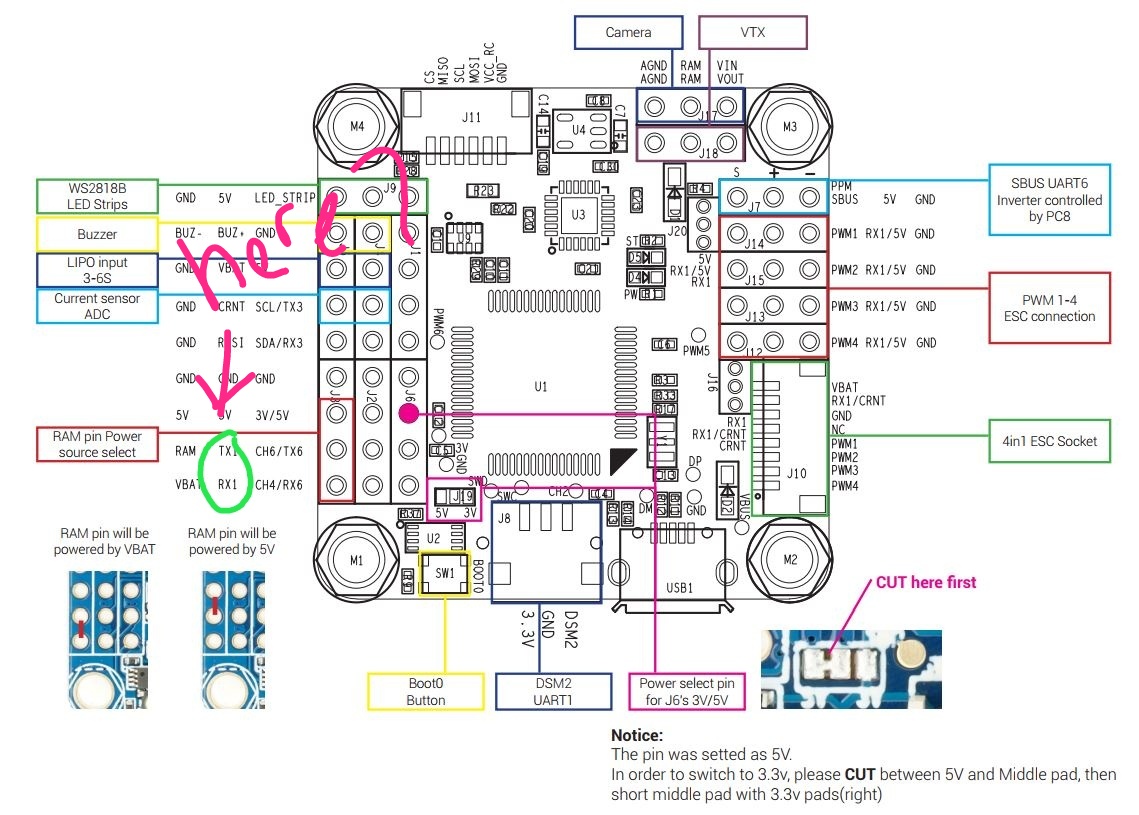
Yes you can just hook it up to thoose pins, and set it up in betaflight GUI for UART1, or you could also use TX3/RX3 for UART3.
Thanks Alex.I will try and report back later
Hi Alex.
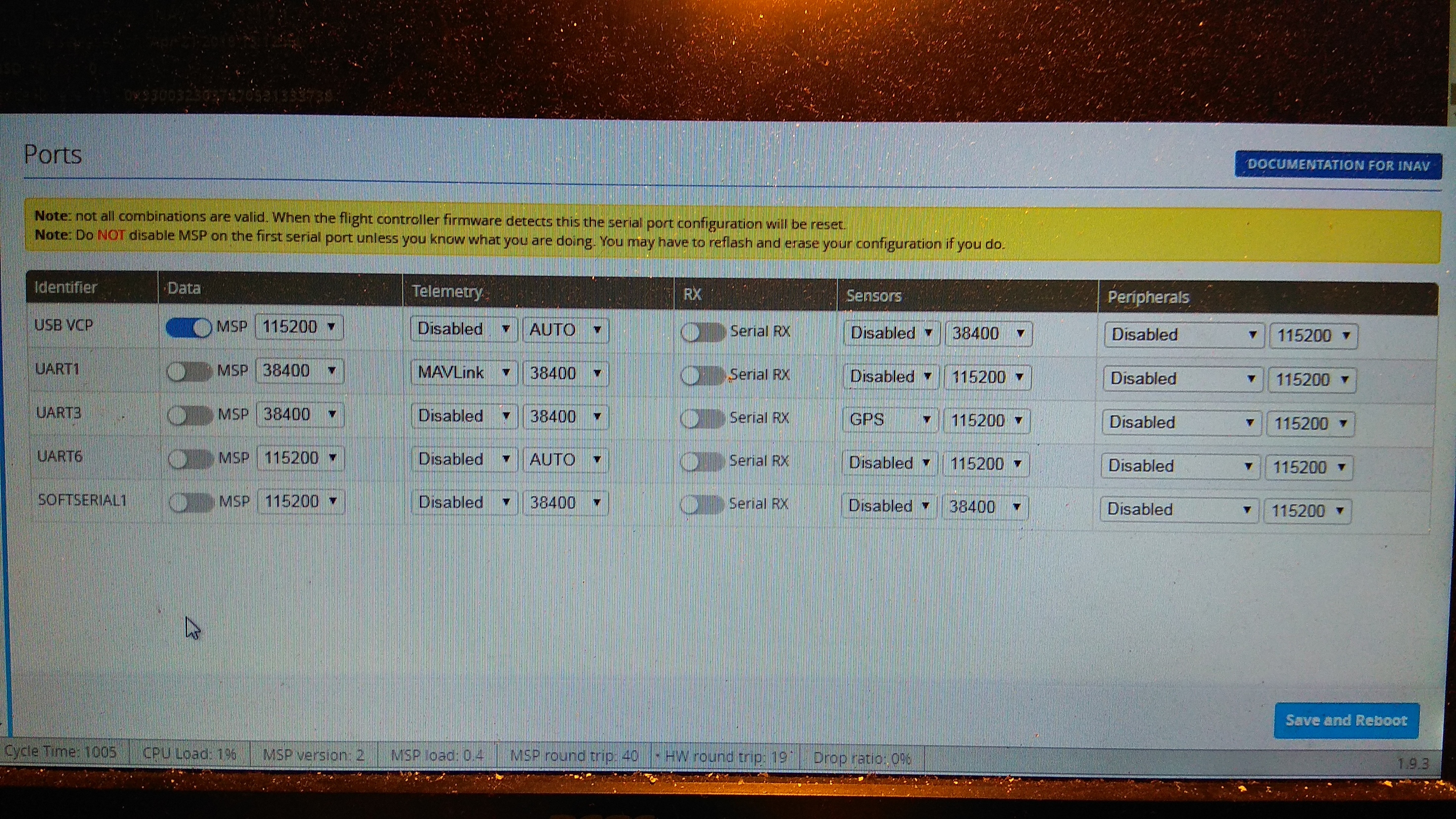
I successfully get data from Mavlink on UART1 but,only few things works on this connection such a gps,compass, altitude etc.Im using Android QGroundControl.I can’t upload my mission on in.Ive try to connect with ezgui and inav from android but not success only for few second and disconnected again and again.This is my configurations.
I dont think you can use Qgroundcontrol to set waypoints in betaflight, as this is not realy supported in the software. Unless I am mistaken? I have never used betaflight for this so I do not know for sure. I always use APM based systems (like Pixhawk) for GPS navigation platforms
Thanks Alex.I moved to Ezgui App  .
.
I just test it by connected Usb Otg to my phone and i got full Mavlink connection and i can upload the waypoints too.But unsuccessful if i use bluetooth connection from my dragonlink V3.There is no data coming in through it.
In qgroundcontrol they just work fine except the waypoint and ect ect not working.Meaning to say that the connection is right because it works.
Im thinking that something is not right on my bluetooth setup since the Mavlink can be use directly from Otg Usb if i use Ezgui.What do you think?
im using UART 1 for Mavlink connection and activated Telemetry on UART 1 on inav configurator.Is there any configuration that i need to do?
That is very strange considerong you can update firmware, but yet cant connect after?
It’s quite a long thread now, so I can’t rememberbut have you already tried the impulserc driver fixer, as it works for 90% of people?
Not yet . I will try soon and report back later. Thanks
While on the subject of Omnibus F4 V5.1 boards, Which is the front, can’t find the little arrow. Thanks in advance.
look were the motor pins are…
Motor one needs to be back right
Motor three needs to be back left
Cheers for that DoomedFPV
This topic was automatically closed 3 days after the last reply. New replies are no longer allowed.