Download Drivers
Depending on the board that you purchased you will need to download one of these two drivers. For Mac/Linux you will still need to download drivers if your boards uses the SiLabs USB to serial chip.
- FTDI Drivers
- SiLabs Drivers - use this version for boards from UnmannedTech
Connecting to the BruGUI
The board should come with firmware already loaded onto it, but if you cant connect for some reason its best to double check you have the correct drivers, and then update to the latest version of the firmware anyways.
You will first need to download the latest firmware and GUI software from the google code project page
Inside the Zip file you will see the firmware as an arduino sketch, and a foder called GUI, open the GUI inside that folder.
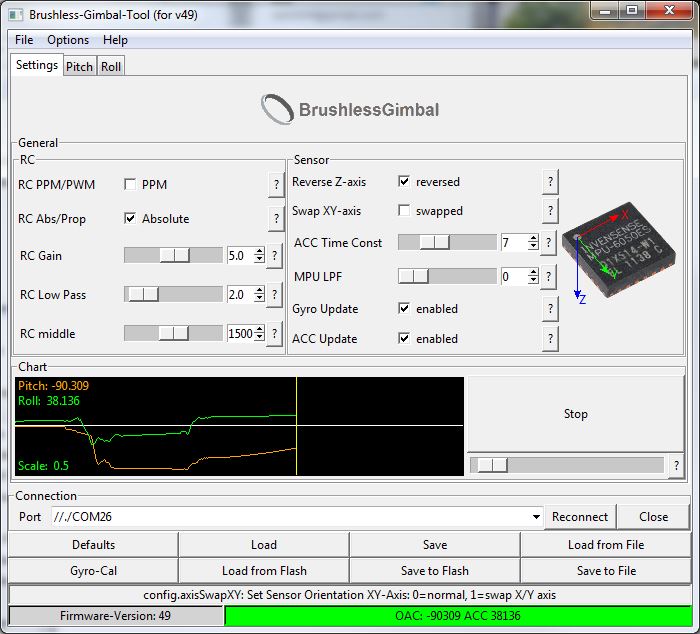
Once the gimbal controller board is connected to your PC via USB cable, and the GUI is open, Select the correct COM port and click connect. After a few seconds you should see some default values show up on the screen. After the initial calibration you should see a green bar at the bottom. if you click on the start button you should see a graph of the IMU readings and it should change as you move it around.
If you dont see that, then I think you are using the wrong version GUI/firmware, so the best thing to do will be to go download the latest version (if you have not done so already) from
Updating Firmware
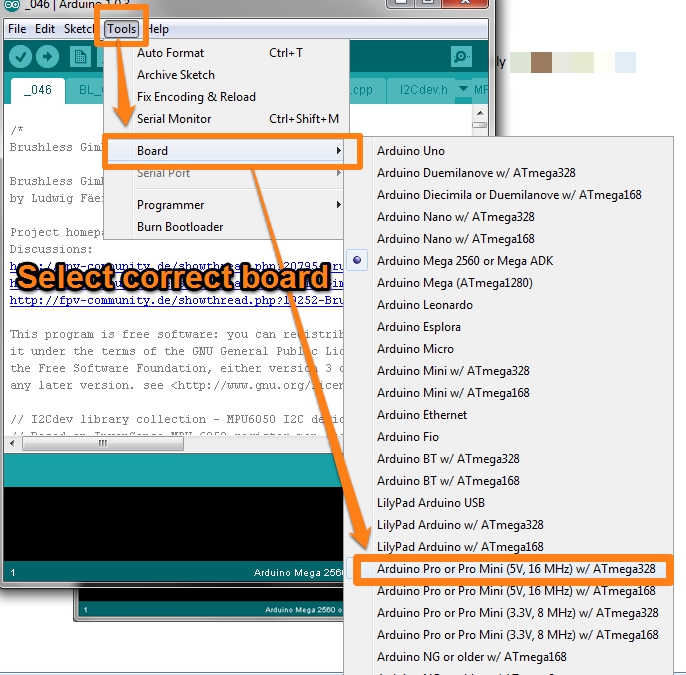
Then you will need to load the latest firware onto the board via arduino software (Download Here). with the board connected and the BruGUI closed. Open the _BruGi.ino file with arduino, select the correct com port of the bard (Tools>Serial Port), and the correct board (Tools>Board>Arduino Pro or Pro Mini 5V@16mhz w/ATmega 328) Then upload the new firmware to the board.
If you receive errors when compiling and sending the sketch, you have most likely due to one of the following
- Wrong board selected
- Wrong COM port selected
- The firmware you downloaded is corrupt (try to download it again)
- If you get this error message avrdude: stk500_getsync (): not in sync: resp = 0x00, it is probably an error with the driver. You can find out how to fix this here
One the latest firmware has been installed, try to connect to the board with the brushless gimbal config GUI and it should all work. If not post your questions below and I will try to help!
Balance your gimbal
Its also very important to properly balance your gimbal, you can find otu some more information in the topic below.
Other Potential Issues
If you find that you are not getting any sensor readings, and it seems its not working, The first thing is to double check it is connected correctly (before fiddling with the wires make sure to disconnect any power/USB from the board). If you have verified its connected properly and its still now working you will need to edit the defines.h code. Open the defines.h file, and the first few lines shown have the following code:
// MPU Address Settings
#define MPU6050_ADDRESS_AD0_LOW 0x68 // default for InvenSense evaluation board
#define MPU6050_ADDRESS_AD0_HIGH 0x69 // Drotek MPU breakout board
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_HIGH
You will need to change the MPU6050_DEFAULT_ADDRESS from HIGH, to LOW as shown below
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_LOW
Save the file, and load it onto your board and it should work. If not, you might have a faulty IMU board