Alright! managed to reflash it after I checked all of them and another checkbox to flash as soon as it recognizes new port(something like that), I’ll do again now the configuration and we could go back to the place we stopped,I filmed the connections to my battery, maybe i didnt do it right or there is something else?
and about the reciever i’ll try to play with it right now hope it will work.
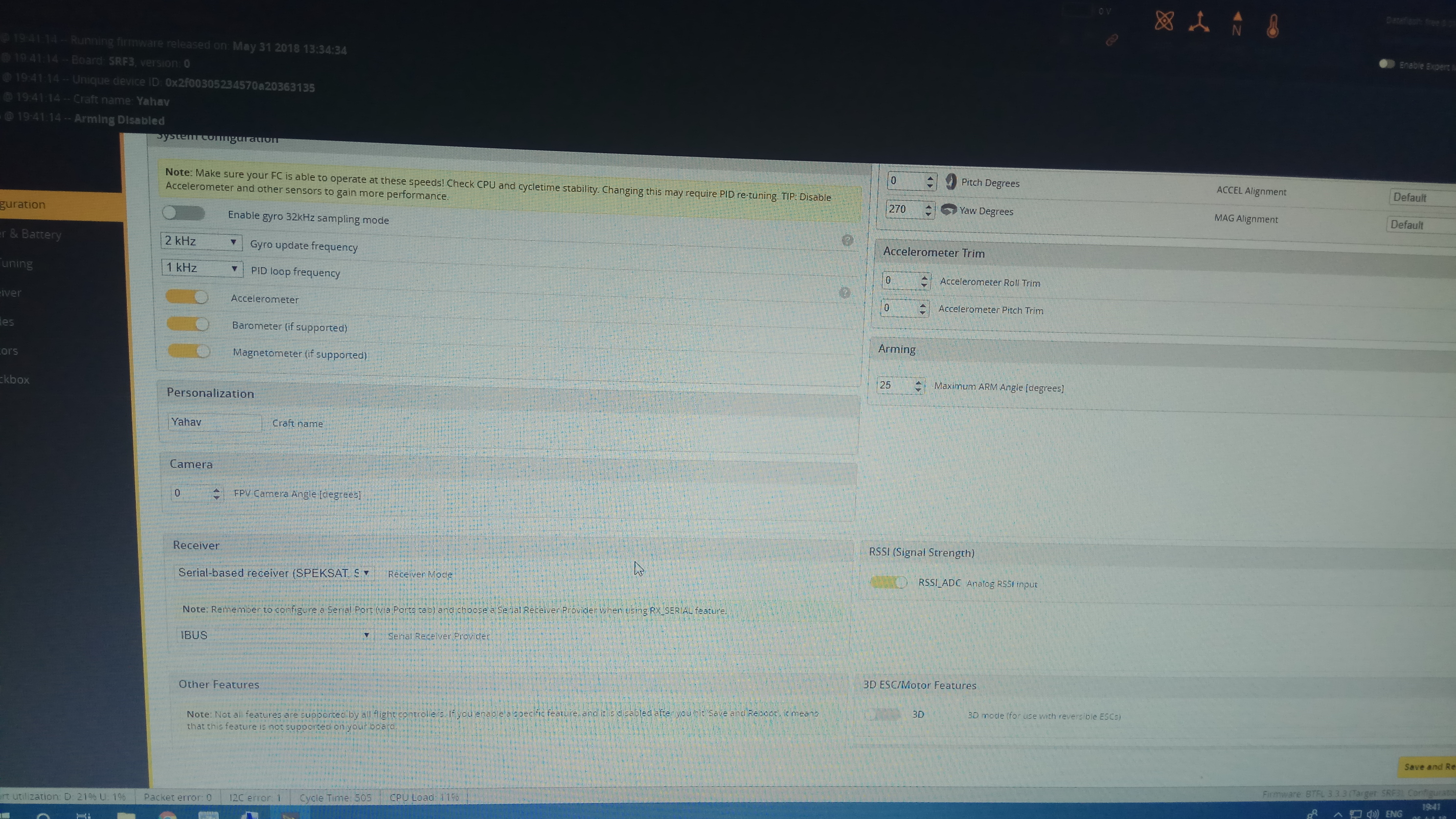
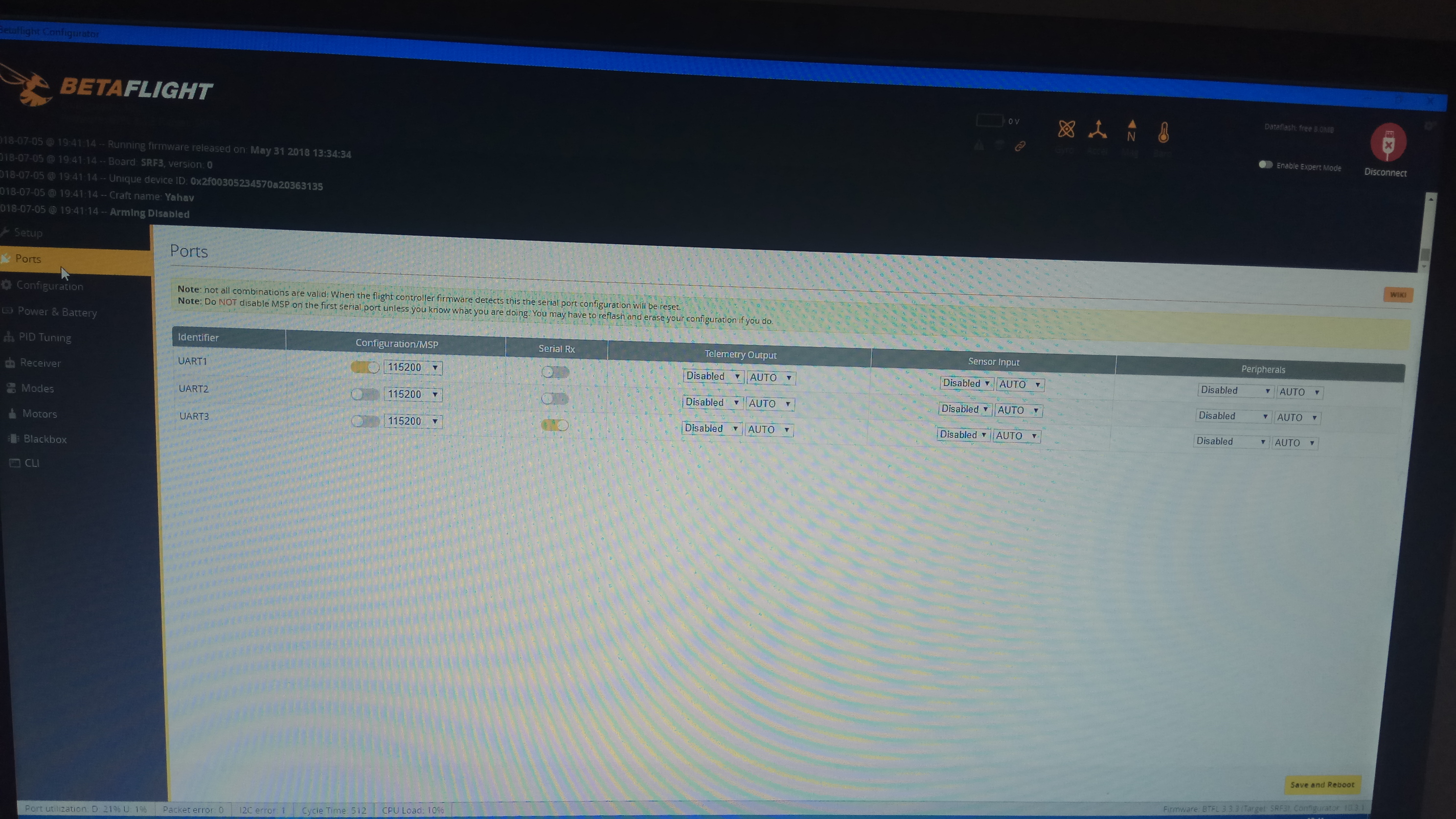
EDIT: so I added the pics of my config,ports, the reciever and its soldering on the FC and the no voltage in BF with the batt is connected, I tried in config PPM RX input and Serial based reciever-iBus like stu did. with no result.
Atleast I know I found one problem,about the voltage, if the engines get power from my battery when I activate them through the BF then its not the solder of the batt connectors I guess, what could it be?
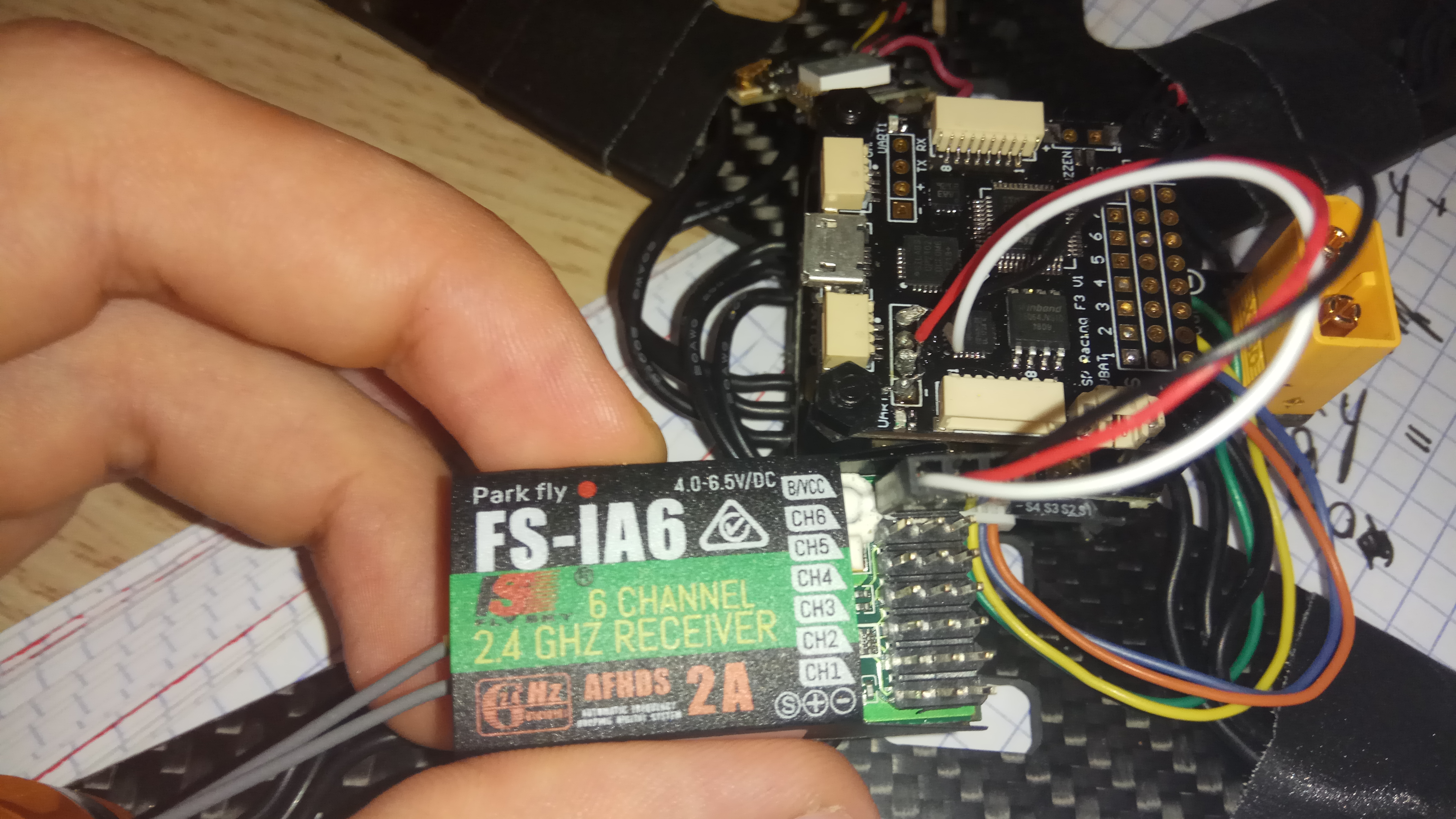

I think you have connected the wires wrong on the reciever. connect it on the pin label of s± below ch1?
u have connected your jr connector to the binding pins, connect it to the pin at the very bottom below ch1. thats your problem after that ur going to be flying
I’m sorry but I didnt understand which jr connector to where, could you draw on the pics I sent?
You mean the jr connector that goes to the reciever? desolder it from the RX,-,+ and solder it to VBAT +,-? which cables?
This step requires no desoldering/soldering
Unfortunately I have watched stu’s video of this build and you sir have the wrong reciever. Your build is fine no changes should done anywhere else but you need to go and buy a reciever that outputs sbus. You have flysky ia6 which only outputs ppm instead of sbus. In Stu’s videos he is using flysky ia6b which has an sbus output. Therefore I recommend getting flysky ia6c reciever than the ia6b because its more compact. In todays standard ppm output is pretty much outdated. These ia6c recievers are pretty cheap i think so if you can get you hands on it, its just a case of pluging the cable from your uart2 to the sbus pins. Sorry it took too long for me to figure out what was wrong with your set up(I had to go back and look at the past pic that you sent me). I apologise.
Oh, you dont need to appologize anything, you helped me a lot!
I’ll order this one is that good?
After I’ll get it i’ll need to configure it as PPM or Sbus? PPM I guess will not require any changes? Sbus I will have to put a wire in my IO connection in the FC?
Thank you!
I found this thread:
Do you think it should try to do it meanwhile the new reciever will arrive or just wait for it?
I just really wanna fly this thing ![]()
Ok at this present moment just wait for your order.You dont need to do anything else. Your ia6 receiver can be used for other application such as building a fixed wing but thats another topic.I looked at the thread just wait and have a break or something.Meanwhile you could educate yourself more in the drone hobby like learning types to esc protocol.
I’ll use it for now to my RC car, i’ll start going over ESC protocols and waiting for your response to order that thing.
yh the ia6c is a good receiver personally i think you should get it before it runs out.
Alright so im updating after a while, I recieved my Turnigy IA6C reciever connected it with iBus to my flysky, my first problem was when I started to lift it up it straighton flipped, I found out I had my yaw configuration wrong and changed it.
Later on from enthusiasm I took it out for a trial and I lost controll of it very quickly and it crashed one time really hard.
2 proppeller were replaced, a small hit to my battery, and two noisy motors.
I found out I forgot to configure Airmode to make it more easier to fly,so I configured it quickly,also didnt balance it in the reciever mode, so when its in the reciever mode the drone just moving by itself a little, fixed that using my FS-i6, did a few checks to my motors after the crash and found out that motor number 4 is synced with all the other motors but sometimes its a little bit weaker.
Today went for another trial without too much expectations and the drone fly AWSOME!!! its insane!!! and also its very stable.
So I ordered meanwhile another set of motors so there wont be any damage to the ESC or other motors.
So when I fly it I can flip it from lifting up my pitch stick sharply, is it possible to limit the drone from flipping while in the air? making its overall behavior more newbie friendly?
Thank you guys for the help! especially Mark which made me to understand a lot.
I’ll try to video it at the weekend or next one for you guys.
Pic after the crash you can notice the propellers not straight:

Here is a few pics,I put for now PVC over the battery that got a hit so the wrap wont continue to fall off:



Yes, I suggest you setup angle mode as this will prevent the quadcopter from tilting past a certain angle. I think its 30 degrees by default.
We have a guide here that talks about the best flight modes for a beginner pilot:
It was very helpful thanks!
Nice one dude just fly crash repair and repeat that all there is to it
What kind of transmitter did you used with the IA6C receiver. I have an FS-I6 transmitter and an FS-IA6B receiver. I have the same issue what you had. Do you think if I buy an IA6C receiver it will work fine?
Im sorry but I had a lot of problems xD
If you can be more specific with your problem ill be happy to help, my transmitter was and still FSi6.
I have bound the receiver and the transmitter together but in the software (cleanflight) in the receiver tab it’s not doing anything if I’m moving the sticks on my transmitter.
Sorry for the late delay I didn’t have any access, have you tried Joushua’s vid we have here on the post? you know the transmitter is good? have you check the channels in the reciever tab in betaflight?
waiting for your update.
I have solved the problem by switching from PPM to i-bus. Now it is working fine. Thank you for your help 