Hi everyone,
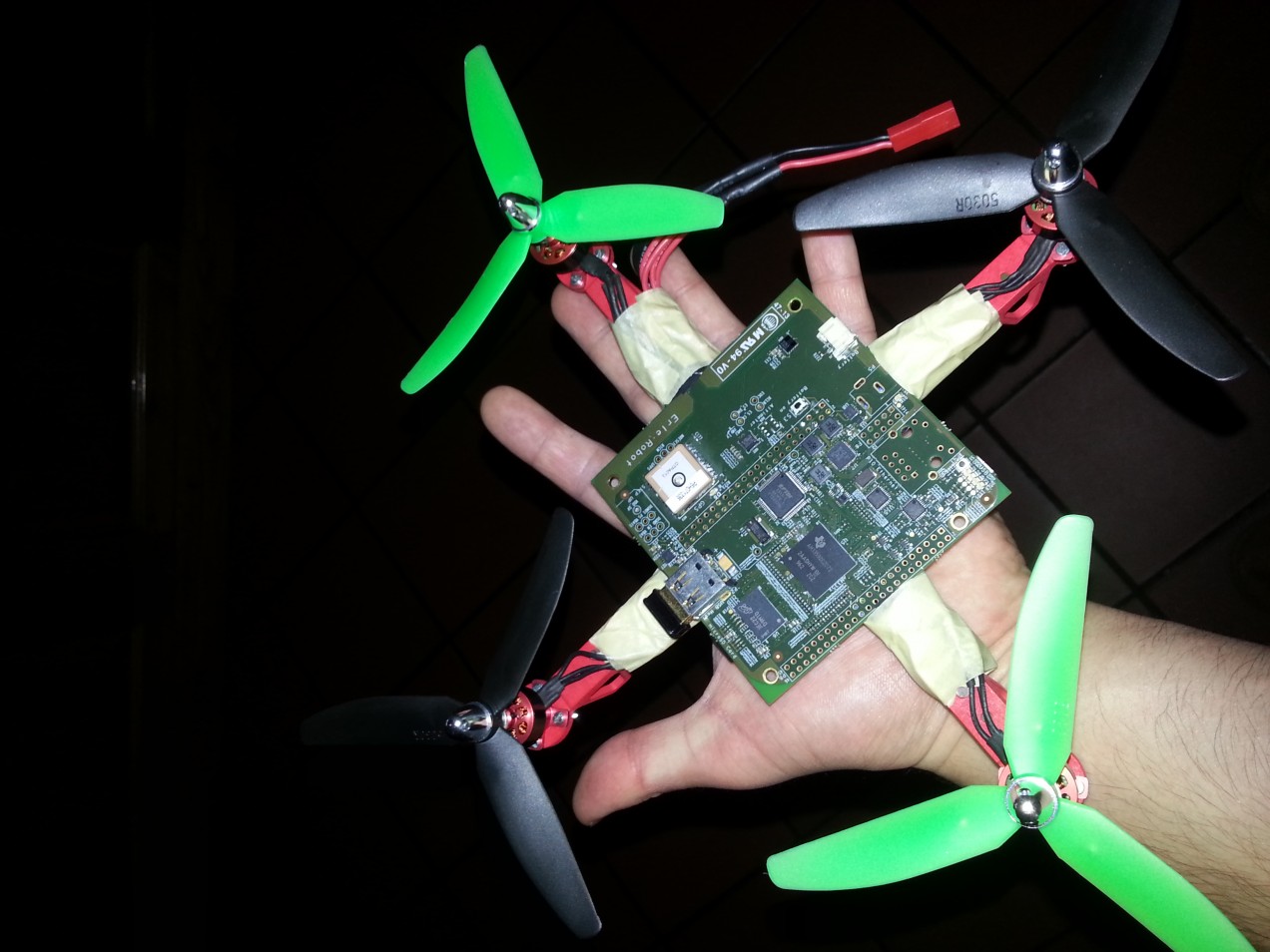
I’d like to introduce another quadcopter, Erle. We’ve been working for about a year to create a drone that wears Linux and some of the most popular frameworks for robotics such as ROS and KnowRob:
We just finished up assembling this prototype and built a test bed and in the following weeks we hope to start trying several control algorithms.
More information at http://erlerobot.com. We will be happy to hear your feedback 
Looks very cool, any ideas of pricing? And of-course you need to share some videos of it flying 
Thanks for the comment, we hope to sell a kit for a quite affordable price compared to the current solutions. Work in progress 
Liking it  Are you using an operating system or is it custom firmware?
Are you using an operating system or is it custom firmware?
Hi! We are using Linux OS. We work with Debian and a Ubuntu File Systems. Real time is an issue so we’re testing the kernel RT patch and Xenomai.
You also might want to look at the ardupilot/arducopter project because its currently being ported over to beaglebone black so might be of some help to you. I dont think its officially released right now but its still in working state I believe.
I was wondering about the real-time response with a non-RT OS. Would be great to see this working, can imagine the more powerful algorithms that can be used to help stabilise the craft or add more complex processing to deal with avoidance of other craft etc
Hi guys! Thanks for your comments. I’m actually pushing with the port of ArduPilot to the BB(B) ;). For informative purposes, there’s also a couple of other promising initiatives, i personally like LinuxDrone where they are working on top of Xenomai. Their code is pretty nice, clear and well structured.
For now on Erle we are testing the capabilities with simple python scripts (no RT yet) but we have plans to embed both ArduPilot (on Linux) and LinuxDrone.
First tests on the Linux userspace shown in this post: “An autopilot implemented in the Linux userpace”
New video launched that introduces some of our work at Erle Robotics.
Very cool, looking forward to seeing more as I think it will be great if you can make it easily accessible to use as a learning and development platform. From my understanding this will be done with python scripts  ? Do you see it as being something along the lines of airwave autopilots, but totally open and affordable?
? Do you see it as being something along the lines of airwave autopilots, but totally open and affordable?
1 Like
From my understanding this will be done with python scripts?
We love python ;). We are also putting special effort in adopting several robotics standards for making it easily accessible. In the short term you would be able to use ROS and many other frameworks.
For example, this weekend i played around (of course with academic interest ;)) with Snoopy. Quite amazing the results.
Do you see it as being something along the lines of airwave autopilots, but totally open and affordable? 
Yes, we do. Totally.
We’ve been building drones for the last years and we want to share the experience of unboxing a fully functional and ready Linux drone inside :).
1 Like
Last week we tried an spherical exoeskeleton.
Quite fun but the weight of the sphere is too much. We will keep improving it and bringing crazy ideas .
More information and a video available here.
Looks like a great idea, especially for testing and development phase
What material did you use to make the cage?
What material did you use to make the cage?
We used PLA.
The result is not optimum, but works for testing ;).
Software plans for the Linux-based autopilot:
Exciting stuff! Not long until the Erle platform is ready for use then?