One of the best features of the X350 Pro quadcopter is that is runs the arducopter firmware making it ideal to hack and mod to gain extra functionality if you want. This guide will show you how to add telemetry to your X350 Pro to unlock a wide variety of features such as the ability to monitor your quadcopters position, and change waypoints only the fly. But the most exciting feature that this will enable is probably the follow me mode that will allow your X350 Pro to autonomously follow you if you are using a smartphone/android tablet.
How hard is this to do?
I would not say that this is a beginner task as it requires you to open up your X350 Pro quadcopter and solder some connectors onto the flight controller. However it is not the most difficult thing to do. For some more tips on soldering you should have a look at our soldering guide here
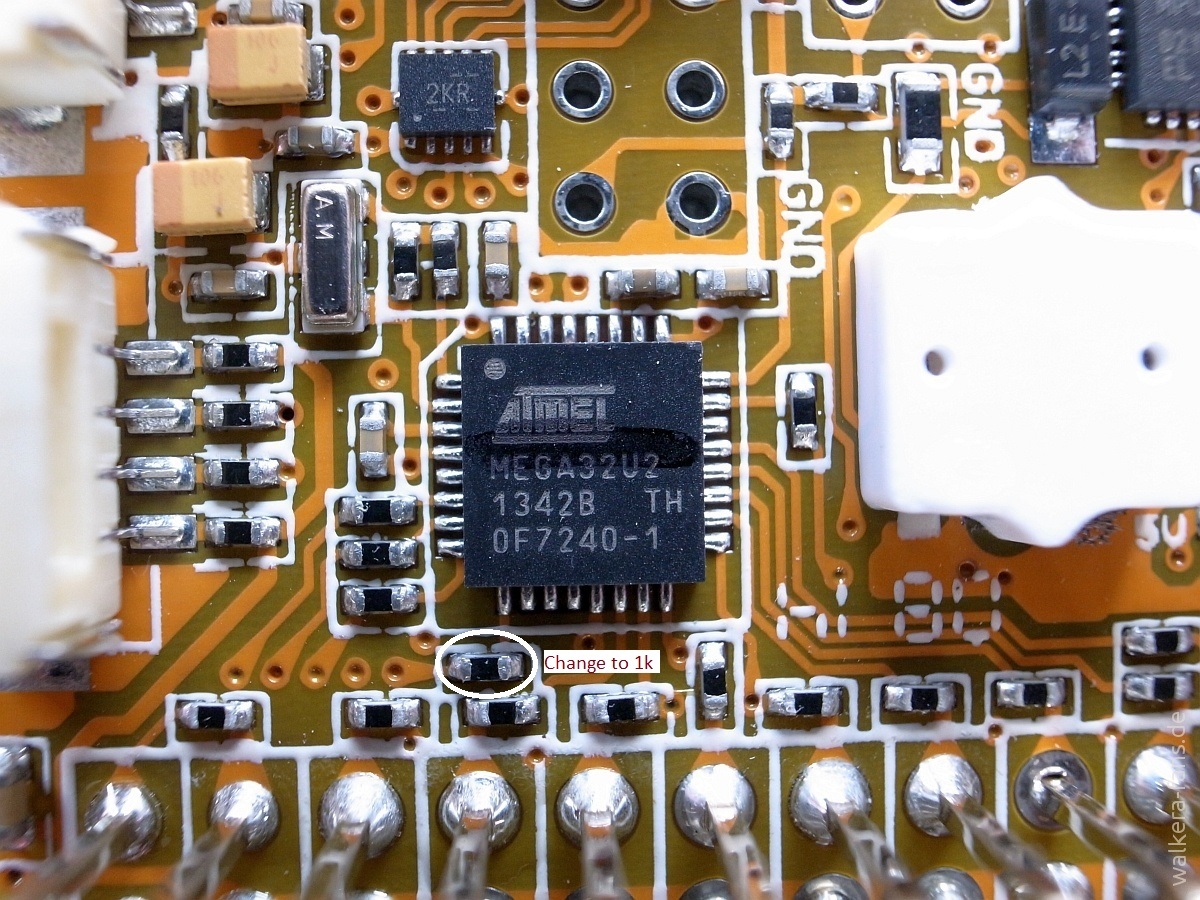
Please note that if you don’t change the resistors you will not be able to get 2 way telemetry, I will update this post soon with further details on how to change the resistors and where to get them. I don’t recommend fiddling with the resistors unless you know what you are doing.
What you will need
- Soldering Iron and some solder
- 3DR telemetry module
- 4 pin connector wire
How to connect everything
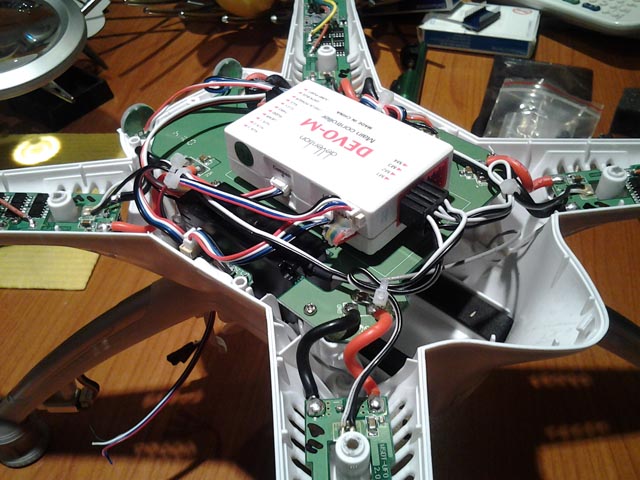
The first thing to do is to open up your X350 Pro by removing some of the screws to remove the top shell. Once this is done you will see the DEVO-M flight controller as shown below.
You will then need to open up the controller case to reveal the flight controller within. On the flight controller PCB you will need to look in the corners for two pads called RX and TX as shown below
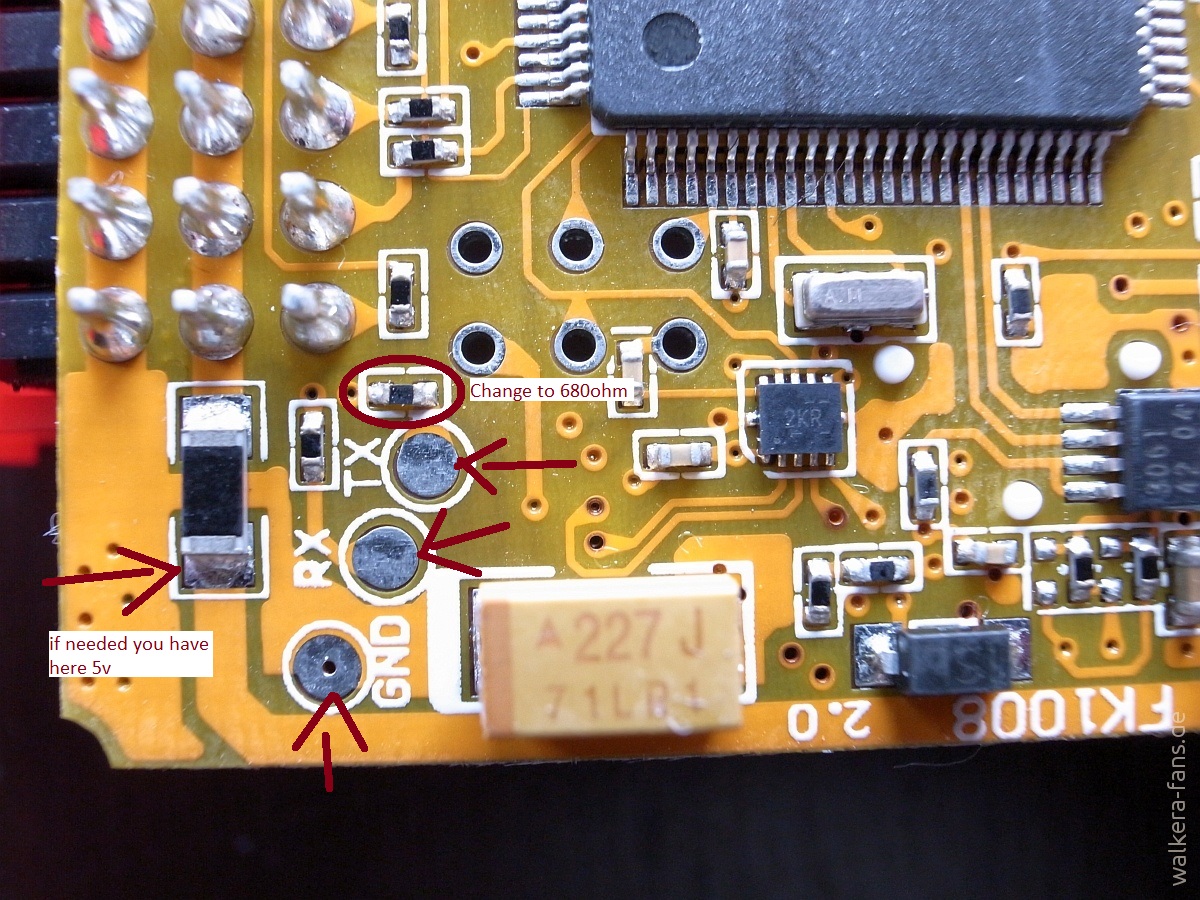
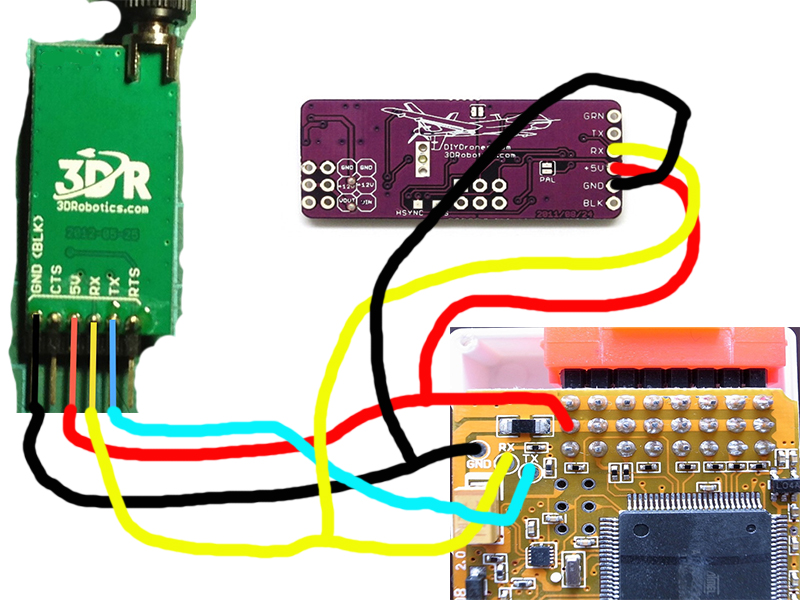
You just need to solder the 4pin wire to the GND, RX, TX and 5V line according to the diagram below. Please note that if you want to also connect a minimOSD board you can do so as it is also shown in the diagram.
Once the wire has been soldered it should look similar to the image below. Please make sure that when you are soldering not to short any of the pins as this could damage your flight controller, particularly when soldering the 5V wire.

Now that the wires have been soldered its a good idea to quickly check the telemetry module works before packing everything up. If you can connect via mission planner through the telemtry modle then you should proceed to close everything. The last step it to mount the 3DR telemetry module, this is usualy on the bottom of the X350 Pro frame

Thats it! You can now install droidplanner on your smartphone/tablet, connect the ground telemetry module using an OTG cable and you can start to use all of the cool new features like follow me, or even click on a point on the map and your X350 Pro will fly there!.
In this guide I have not included any steps on how to pair your 3DR telemetry modules, but if you have any questions please let me know and I can add the information or answer your questions.
Happy Flying!
 . As for the resistor, you dont have to change it as many customers have successfully used the 3DR radio with no resistor. But you can find them on ebay if you want to do this.
. As for the resistor, you dont have to change it as many customers have successfully used the 3DR radio with no resistor. But you can find them on ebay if you want to do this.
 Thanks for that help. I had forgotten that when I had my Iris the same thing needed to be adjusted.
Thanks for that help. I had forgotten that when I had my Iris the same thing needed to be adjusted.